2014-02-24
2014-02-24 1384
1384Содержание лекции: расчет и анализ свободных составляющих при коротком замыкании в дальней линии.
Цель лекции: изучение методов анализа свободных составляющих на примере блочной электропередачи.
Рассмотрим блочный вариант исполнения дальней электропередачи, который позволяет упростить расчет и анализ свободных составляющих. Для этого варианта проведена серия расчетов переходных процессов.
При коротких замыканиях расчет токов и напряжений проводится в начале и конце линии. Рассмотрены как симметричные, так и несимметричные однофазные КЗ. Расчетные условия коротких замыканий определены, угол включения КЗ для частот свободных составляющих выше промышленной равен  и нулю для частот ниже промышленной и апериодической составляющих; предшествующий режим - режим натуральной мощности, особая фаза -А. Изменение напряжения и тока в начале линии при трехфазном КЗ в точке 120 км показано на рисунка 7.1. Кривые напряжений и токов свидетельствуют о наличии в их составе высших гармонических составляющих.
и нулю для частот ниже промышленной и апериодической составляющих; предшествующий режим - режим натуральной мощности, особая фаза -А. Изменение напряжения и тока в начале линии при трехфазном КЗ в точке 120 км показано на рисунка 7.1. Кривые напряжений и токов свидетельствуют о наличии в их составе высших гармонических составляющих.
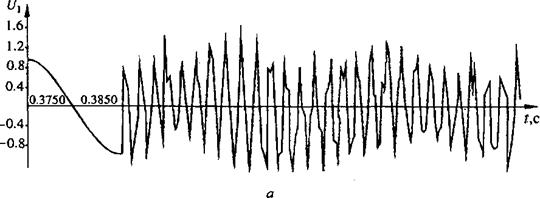
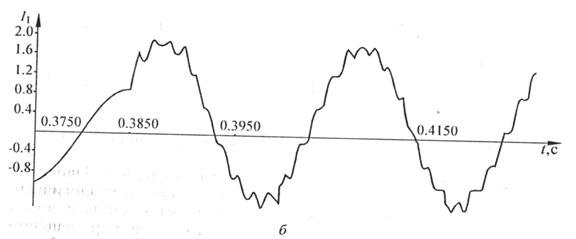
Рисунок 7.1
Частотный анализ этих кривых по методу, описанному в лекции 6, позволил получить амплитудно-частотные характеристики, определяющие параметры свободных составляющих напряжения (см. рисунок 7.2). Результаты расчета переходных процессов и их спектров позволили построить зависимости частот свободных составляющих от расстояния до точки КЗ.
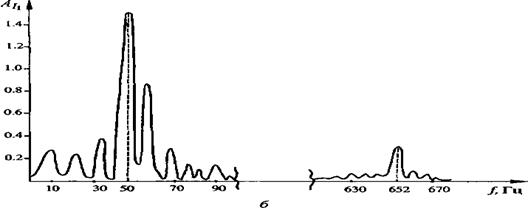
Рисунок 7.2
Эти зависимости для трехфазного КЗ приведены на рисунке 7.3. Зависимости  для однофазных и двухфазных КЗ имеют аналогичный характер. Общей особенностью этих зависимостей для всех видов КЗ является монотонное уменьшение частот при перемещении точки КЗ вглубь линии. Свободные составляющие напряжения и тока имеют частоты, близкие по величине, и одинаковый характер изменения. Не менее важным параметром свободных составляющих является их амплитуда, на которую существенное влияние оказывает фаза включения КЗ.
для однофазных и двухфазных КЗ имеют аналогичный характер. Общей особенностью этих зависимостей для всех видов КЗ является монотонное уменьшение частот при перемещении точки КЗ вглубь линии. Свободные составляющие напряжения и тока имеют частоты, близкие по величине, и одинаковый характер изменения. Не менее важным параметром свободных составляющих является их амплитуда, на которую существенное влияние оказывает фаза включения КЗ.
На рисунке 7.4 приведены зависимости амплитуды первой составляющей напряжения от расстояния до точки КЗ при двух углах включения. Существенное влияние на частоты и амплитуды свободных составляющих оказывают такие характерные для линий сверхвысокого напряжения явления, как
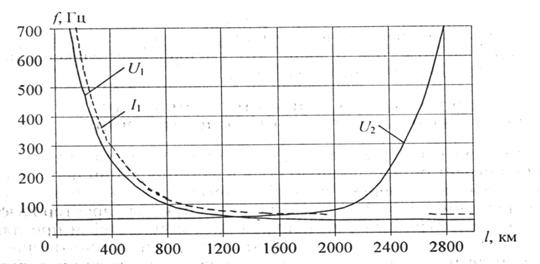
Рисунок 7.3
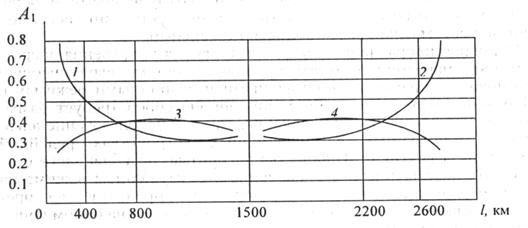
Рисунок 7.4
поверхностный эффект, корона, а также работа разрядников. Изучение влияния этих факторов показывает следующее:
- коронный разряд, сопровождающий переходный процесс при КЗ на воздушных линиях, незначительно (3 - 5 %) изменяет частоты свободных составляющих и уменьшает на 30 - 50 % их амплитуды;
- работа разрядников не оказывает существенного влияния на частоты свободных составляющих, она значительно увеличивает затухание переходного процесса и уменьшает амплитуды свободных составляющих на 20 - 30 %;
- влияние поверхностного эффекта на частоты свободных составляющих несущественно. Амплитуды уменьшаются, причем чем выше частота, тем больше это уменьшение. Максимальное уменьшение составляет не более 30 %.
8 Лекция. Ограничение токов короткого замыкания
Содержание лекции: средства ограничения токов короткого замыкания.
Цель лекции: изучение средств ограничения токов короткого замыкания на стадии проектирования и в условиях эксплуатации.
8.1 Средства ограничения токов КЗ
Рост уровней токов КЗ вызывает снижение эксплуатационной надежности всех элементов электрической системы. В первую очередь страдают жесткие шины, кабели, электрические аппараты. В меньшей степени повышение уровней токов КЗ затрагивает генераторы и трансформаторы, хотя и для них необходимо предусматривать отрицательные последствия этого повышения.
Ограничению токов КЗ в энергосистемах всегда уделяется достаточно большое внимание. Для этого применяются как схемные решения, так и специальные устройства. Наиболее широко используются:
- оптимизация структуры и параметров сети;
- стационарное или автоматическое деление сети;
- применение токоограничивающих устройств;
- оптимизация режима заземления нейтралей в электрических сетях.
В зависимости от местных условий, требуемой степени ограничения токов при различных видах КЗ, а также технико-экономических показателей в сетях энергосистемы используются различные средства ограничения или их комбинации, дающие наибольший технико-экономический эффект.
8.1.1 Оптимизация структуры и параметров сети (схемные решения)
Схемные решения принимаются, как правило, на стадии проектирования схем развития энергосистем, при этом выбираются оптимальные схемы выдачи мощности электростанций и параметры элементов сетей энергосистем.
Оптимизация структуры сети являются эффективным средством ограничения токов КЗ. С этой целью применяется периферийное (продольное) разделение сетей, при котором части территории сетей (районы) одного напряжения связываются между собой только через сеть повышенного напряжения (см. рисунок 8.1, а). Местное, или поперечное, разделение сетей (см. рисунок 8.1, б) осуществляется наложением сетей одного и того же напряжения на площади какого-либо района и связью этих сетей через сеть повышенного напряжения.
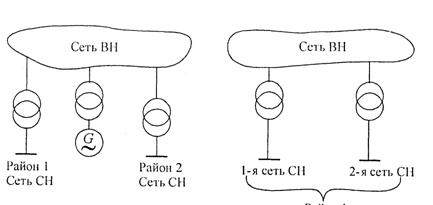
Рисунок 8.1
8.1.2 Стационарное или автоматическое деление сети
Деление сети применяют в процессе эксплуатации, когда требуется ограничить уровни токов КЗ при ее развитии. Различают деление сети стационарное (СДС) и автоматическое (АДС).
Стационарное деление сети осуществляется в нормальном режиме с помощью секционных, шиносоединительных и линейных выключателей. Оно производится тогда, когда уровень тока КЗ в узле сети превышает допустимые значения для параметров установленного оборудования. На рисунке 8.2 показан пример деления сети на электростанции с двумя распределительными устройствами двух повышенного напряжения. Деление производится в результате разрыва трансформаторной связи между распредустройствами двух повышенных напряжений. СДС оказывает существенное влияние на режимы, устойчивость и надежность работы электрической системы, также на потери мощности в сетях.
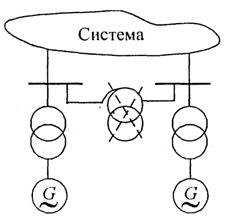
Рисунок 8.2
АДС производится в аварийном режиме для обеспечения работы коммутационных аппататов. Оно осуществляется на секционных или шиносоединительных выключателях, иногда – на выключателях мощных присоединений. При АДС образуется система каскадного отключения токов КЗ. Однако АДС имеет некоторые недостатки:
- возможность появления в послеаварийном режиме значительных небалансов мощностей источноков и нагрузки в разделившихся частях сети;
- увеличение времени восстановления нормального режима.
Несмотря на это, устройства АДС широко применяются в энергосистемах, так как дешевы, просты и надежны.
8.1.3 Токоограничивающие устройства
Токоограничивающие устройства, выполняя свою основную задачу – ограничение токов КЗ, не должны существенно влиять на нормальный режим работы сети, должны иметь стабильные характеристики при изменении схемы и параметров режима.
Токоограничивающие реакторы могут иметь различные конструктивные исполнения и параметры.
Реакторы с линейной характеристикой, включаемые последовательно в соответствующую линию, ограничивают ток КЗ и поддерживают относительно высокий уровень остаточного напряжения в узле подключения. Но в них в нормальном режиме теряются активная и реактивная мощности, а также возникают потери и падение напряжения. Возможные схемы включения линейных и секционных реакторов приведены на рисунке 8.3.
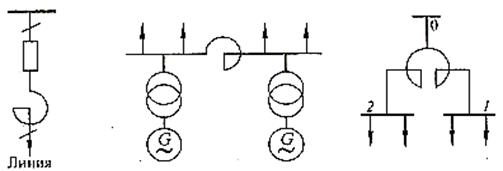
Рисунок 8.3
Реакторы с нелинейной характеристикой.. К этой группе относятся управляемые и насыщающиеся реакторы.
Управляемый реактор – это регулируемый реактор со сталью, изменение сопротивления которого осуществляется подмагничиванием магнитопровода полем постоянного тока. При КЗ сопротивление реактора увеличивается и происходит ограничение тока КЗ.
Насыщающий реактор – это неуправляемый реактор в нелинейной характеристикой (со сталью), которая определяется насыщением магнитопровода полем обмотки переменного тока. Эквивалентное сопротивление реактора растет с увеличением тока. Это свойство реактора используется для ограничения тока КЗ.
Токоограничивающие коммутационные аппараты уменьшают ударный ток КЗ, т.е являются аппаратами безынерционного действия. К ним относятся токоограничивающие предохранители и ограничители ударного тока взрывного действия.
Токоограничивающие предохранители изготавливают на напряжение 6 – 35 кВ. Они отличаются простотой конструкции и небольшой стоимостью, но имеют ряд недостатков:
- одноразовое действие, что затрудняет применение автоматического повторного включения;
- нестабильность токовременных характеристик;
- неуправляемость со стороны внешних устройств (релейной защиты) и т.д., в связи с чем предохранители устанавливаются в цепях менее ответственных потребителей.
Ограничители ударного тока взрывного действия – сверхбыстродействующие управляемые коммутационные аппараты одноразового действия. Конструктивно – это герметизированный цилиндр, внутри которого располагается токонесущий проводник с вмонтированным в него пиропатроном. Сигнал на взрыв пиропатрона подается от внешнего управляющего устройства, получающего информацию о КЗ от измерительного органа, фиксирующего величину ток КЗ и ее производную. Ограничение тока достигается за время порядка 0,5 мс, полное время отключения цепи составляет 5 мс, т.е. ¼ периода промышленной частоты.
Резонансные токоограничивающие устройства. Принцип их действия основан на использовании эффекта резонанса напряжений при работе в нормальном режиме и расстройке резонанса в аварийном режиме.
Кроме того, известны другие токоограничивающие устройства:
- токоограничивающие устройства трансформаторного и реакторно- вентильного типов;
- вставки постоянного тока;
- сверхпроводниковые токоограничивающие устройства.
9 Лекция. Устойчивость электрических систем
Содержание лекции: основные понятия и определения устойчивости, допущения принимаемые при анализе устойчивости. Задачи расчета устойчивости электрических систем.
Цель лекции: ознакомление с основными понятиями и определениями устойчивости, рассмотрение допущений при расчете устойчивости, знакомство с задачами расчета устойчивости.
9.1 Основные понятия и определение устойчивости
В установившимся режиме реальной системы его параметры постоянно меняются, что связано со следующими факторами:
- изменением нагрузки и реакцией на эти изменения регулирующих устройств;
- нормальными эксплуатационными изменениями схемы коммутации системы;
- включением и отключением отдельных генераторов или изменением их мощности.
Таким образом, в установившимся режиме системы всегда есть малые возмущения параметров ее режима, при которых она должна быть устойчива.
Статическая устойчивость – это способность системы восстанавливать исходный (или близкий к исходному) режим после малого его возмущения.
Аварийные режимы в электрической системе возникают при КЗ, аварийных отключениях нагруженных агрегатов или линий и т.п. Под действием больших возмущений возникают резкие изменения режима.
Динамическая устойчивость – это способность системы возвращаться в исходное (или близкое к нему) состояние после большого возмущения. Когда после большого возмущения синхронный режим системы нарушается, а затем после допустимого перерыва восстанавливается, то говорят о результирующей устойчивости системы.
Исходя из определения статической устойчивости системы, можно заключить, что существует такой режим, при котором очень малое увеличение нагрузок вызывает нарушение его устойчивости. Такой режим называется предельным, а нагрузки системы – максимальными или предельными нагрузками по условиям статической устойчивости.
Ограничение нагрузок может быть вызвано и другими обстоятельствами, например, нагревом элементов электрической системы (генераторов, трансформаторов и т.п.). В этом случае говорят о предельных нагрузках по условию нагрева и устанавливают также максимальное время существования режима.
Возможны ограничения нагрузок по уровням напряжения в узлах, напряжению короны и т.п.
Пропускной способностью элемента системы называют наибольшую мощность, которую можно передать через этот элемент с учетом всех ограничивающих факторов (нагрева, устойчивости, напряжения в узлах и т.п.).
Понятие о пропускной способности справедливо и для динамической устойчивости. В этом случае говорят о пределе передаваемой мощности по условиям динамической устойчивости при КЗ в какой-либо точке, отключении линии и т.п.
Статические характеристики – это связи параметров режима системы, представленные аналитически или графически и не зависящие от времени. Эти связи выявляются в основном в установившимся режиме системы.
Динамические характеристики – это связи параметров, полученных при условии, что они зависят от времени. В этом случае отражается влияние первых, а возможно, и более высоких производных рассматриваемых параметров.
Динамический переход от одного режима к другому подвергается качественной оценке. При этом оцениваются характер протекания переходного процесса (быстрый, медленный, монотонный, апериодический) и характер нового установившегося режима. Считается, что качество переходного процесса хорошее, если наблюдаются быстрое его затухание, апериодичность или монотонность. Режим, наступающий после переходного процесса, должен иметь достаточный запас устойчивости, который проверяется изменением какого-либо параметра. Наибольшая величина отклонения, при которой система еще сохраняет устойчивость, определяет запас устойчивости, выражаемый коэффициентом запаса. Например, запас по напряжению определяется
 ,
,
запас по мощности
 .
.
9.2 Допущения, принимаемые при анализе устойчивости
В дополнение к принятым при анализе электромагнитных переходных процессов допущениям принимаются еще несколько, упрощающих оценку устойчивости и обеспечивающих достаточную для инженерных расчетов точность.
1.Предполагается, что скорость вращения роторов синхронных машин при протекании электромеханических переходных процессов изменяется в небольших пределах (2-3%) синхронной скорости.
2. Считается, что напряжения и токи статора и ротора генератора изменяются мгновенно.
3. Нелинейность параметров системы не учитывается. Нелинейность параметров режима учитывается. Если же это не учитывать, то считают систему линеаризованной.
4. Перейти от одного режима электрической системы к другому можно, изменив собственные и взаимные сопротивления системы, также ЭДС генераторов и двигателей.
5. Исследование динамической устойчивости при несимметричных возмущениях производится в схеме прямой последовательности. Считается, что движение роторов генераторов и двигателей обусловлено моментами, создаваемыми токами прямой последовательности.
9.3 Задачи расчета устойчивости электрических систем
При анализе статической устойчивости возникает ряд задач, которые решаются в проектных и эксплуатационных организациях. К таким задачам относятся:
1) Расчет параметров предельных режимов (предельной передаваемой мощности по линиям энергосистемы, критического напряжения узловых то-
чек системы, питающих нагрузку, и т.д).
2) Определение значений коэффициентов запаса. Вместе с коэффициентами запаса по напряжению и мощности могут вычисляться коэффициенты запаса по настроечным параметрам АРВ:
 ,
,
где  и
и  - максимальное и минимальное значение настроечных параметров, соответствующих границе области статической устойчивости.
- максимальное и минимальное значение настроечных параметров, соответствующих границе области статической устойчивости.
3) Выбор мероприятий по повышению статической устойчивости энергосистем или обеспечению заданной пропускной способности передачи.
4) Разработка требований, направленных на улучшение устойчивости систем. Выбирается настройка АРВ, обеспечивающая требуемую точность поддержания напряжения.
Решение перечисленных задач проводится с учетом возможности возникновения самораскачивания системы.
Задачи анализа динамической устойчивости связаны с переходом системы от одного установившегося режима к другому. Это следующие задачи:
а) расчет параметров динамического перехода при эксплуатационном или аварийном отключениях нагруженных элементов электрической системы;
б) определение параметров динамических переходов при коротких замыканиях в системе с учетом различных факторов:
- возможного перехода одного несимметричного КЗ в другое (например, однофазного в двухфазное);
- работы автоматического повторного включения элемента, отключившегося после КЗ, и т.д.
Результатами расчета динамической устойчивости являются:
- предельное время отключения расчетного вида КЗ в наиболее опасных точках системы;
- паузы систем АПВ, установленных на различных элементах электрической системы;
- параметры систем автоматического ввода резерва (АВР).
Расчеты ведутся, как правило, с учетом нелинейностей и существенных динамических характеристик.
10 Лекция. Статическая устойчивость простейшей системы
Содержание лекции: характеристика мощности генератора, признак статической устойчивости системы.
Цель лекции: вывод уравнения мощности генератора, рассмотрение режимов работы простейшей системы при малых возмущениях.
Под простейшей системой понимается такая, в которой одиночная электростанция (эквивалентный генератор) связана с шинами (системой) неизменного напряжения трансформаторами и линиями, по которым передается мощность от станции в систему (см. рисунок 10.1). Принимается, что суммарная мощность электрических станций системы во много раз превышает мощность рассматриваемой станции. Это позволяет считать напряжение на шинах системы неизменным (U = const) при любых режимах ее работы.
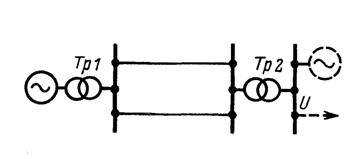
Рисунок 10.1
На рисунке 10.2 дана схема замещения данной электропередачи, в которой отсутствуют активные сопротивления и емкости и элементы схемы представлены только их индуктивными сопротивлениями.
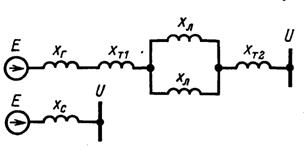
Рисунок 10.2
Сумма индуктивных сопротивлений генераторов, трансформаторов и линий дает результирующее индуктивное сопротивление системы:
Хс = Хг + Хт1 + 0,5Хл + Хт2.
Здесь, и в дальнейшем, под индуктивным сопротивлением генератора следует понимать его переходное сопротивление  .
.
На рисунке 10.3 показана векторная диаграмма нормального режима работы электропередачи, из которой ввиду равенства отрезков ОА = E sinδ и ВС = Iа Хс вытекает соотношение
 ,
,
где Iа – активный ток;
δ – угол сдвига вектора ЭДС  относительно вектора напряжения приемной системы
относительно вектора напряжения приемной системы  .
.
Умножая обе части равенства на U/Xc, получим:
 ,
,
или
 , (10.1)
, (10.1)
где Р – активная мощность, выдаваемая генератором;
 - переходная ЭДС генератора.
- переходная ЭДС генератора.
Зависимость (10.1) имеет синусоидальный характер и называется характеристикой мощности генератора.. С увеличением угла δ мощность Р сначала возрастает, но затем, достигнув максимального значения, начинает падать (см. рисунок 10.4).
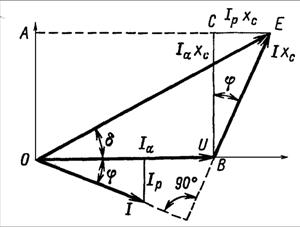
Рисунок 10.3
При данном значении ЭДС генератора Е и напряжения приемника U существует определенный максимум передаваемой мощности
 , (10.2)
, (10.2)
который называется идеальным пределом мощности рассматриваемой простейшей электрической системы. Равновесие между мощностью турбины и генератора достигается лишь при значениях мощности меньших Рm, причем данному значению мощности турбины Ро соответствуют две возможные точки равновесия на характеристике мощности генератора и, следовательно, два значения угла δа и δb (см. рисунок 10.4). Однако в действительности устойчивый установившийся режим работы электропередачи возможен только при угле δа. Режим в точке b на падающей части характеристики неустойчив и длительно существовать не может.
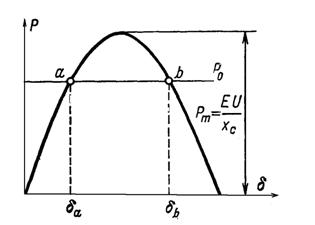
Рисунок 10.4
Рассмотрим режим работы в точке а. В этой точке мощности турбины и генератора уравновешивают друг друга. Если допустить, что угол δа получает небольшое приращение Δδ, то мощность генератора по синусоидальной зависимости от угла также изменится на величину ΔР, причем в точке а положительному приращению угла Δδ соответствует также положительное изменение мощности генератора ΔР. Мощность турбины не зависит от угла δ и при любых его изменениях остается постоянной и равной Ро. В результате изменения мощности генератора равновесие моментов турбины и генератора оказывается нарушенным и на валу машины возникает избыточный момент тормозящего характера, поскольку тормозящий момент генератора в силу положительного изменения мощности ΔР преобладает над вращающим моментом турбины.
Под влиянием тормозящего момента ротор генератора начинает замедляться, что обусловливает перемещение связанного с ротором вектора ЭДС в сторону уменьшения угла δ. В результате уменьшения угла вновь восстанавливается исходный режим работы в точке а и, следовательно, этот режим должен быть устойчивым. То же самое может быть и при отрицательном приращении угла Δδ в точке а.
Совершенно другая получается картина в точке b. Здесь положительное приращение угла Δδ сопровождается не положительным, а отрицательным изменением мощности генератора ΔР. Изменение мощности генератора вызывает появление избыточного момента ускоряющего характера, под влиянием которого угол δ не уменьшается, а возрастает. С ростом угла мощность генератора продолжает падать, что приводит к дальнейшему увеличению угла и т.д. Процесс сопровождается непрерывным перемещением вектора ЭДС относительно вектора напряжения приемной системы (см. рисунок 10.5) и станция выпадает из синхронизма. Таким образом, режим работы в точке b статически неустойчив и практически неосуществим.
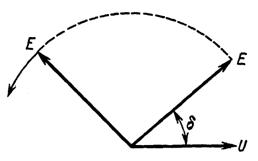
Рисунок 10.5
Точка а и любая другая точка на возрастающей части синусоидальной характеристики мощности отвечают статически устойчивым режимам и, наоборот, все точки падающей части характеристики – статически неустойчивым.
Формальным признаком статической устойчивости электрической системы может служить знак приращения мощности к приращению угла. Если ΔР/Δδ > 0, то система устойчива, если это отношение отрицательно, то неустойчива. Переходя к пределу, можно записать критерий устойчивости простейшей системы:
 > 0.
> 0.
Увеличение мощности турбины приводит к возрастанию угла ротора и уменьшению запаса статической устойчивости. Запас устойчивости электропередачи, связывающей станцию с шинами энергосистемы, должен быть не менее 20% в нормальном режиме и 8% в кратковременном послеаварийном.
11 Лекция. Уравнение движения ротора генератора. Характеристика мощности электропередачи с регулируемыми генераторами
Содержание лекции: уравнение движения ротора генератора, характеристика мощности генератора с АРВ, типы АРВ.
Цель лекции: вывод уравнения движения ротора генератора, ознакомление с режимами работы генераторов, имеющих АРВ, типы АРВ.
11.1 Уравнение движения ротора генератора
Незначительное возмущение в цепи статора генератора вызывает движение ротора в сторону увеличения или уменьшения угла δ (это зависит от знака избыточного момента). Возмущение сообщает ротору некоторое ускорение α, которое в относительных единицах пропорционально избыточному моменту ΔМ и обратно пропорционально постоянной инерции Tj:
 . (11.1)
. (11.1)
Здесь принимается, что при небольших изменениях скорости  ; Tj – время, в течение которого скорость ротора изменяется от нуля до номинальной под действием номинального избыточного момента и при постоянном моменте сопротивления. Оно определяется:
; Tj – время, в течение которого скорость ротора изменяется от нуля до номинальной под действием номинального избыточного момента и при постоянном моменте сопротивления. Оно определяется:
 (с), (11.2)
(с), (11.2)
где GD2 – маховый момент, т м2;
n – скорость вращения, об/мин;
Sном – номинальная мощность генератора, кВА.
Возвращаясь к уравнению (11.2) и учитывая, что ускорение представляет собой вторую производную от угла по времени
 , (11.3)
, (11.3)
получаем
 , (11.4)
, (11.4)
где Ро – мощность турбины;
Pmax – максимальное значение мощности аварийного режима.
Уравнение (11.4) называется уравнением движения ротора генератора. Его решение в форме δ = f(t) дает картину изменения угла δ во времени и позволяет судить об устойчивости генератора.
11.2 Характеристика мощности электропередачи с регулируемыми генераторами
Рассмотрим простейшую систему, принципиальная схема и схема замещения которой показана на рисунке 11.1. Из схемы замещения определим суммарное индуктивное сопротивление Хс = Хг + Хт1 + Хл + Хт2. Предположим, что у генераторов отсутствует система регулирования напряжения.
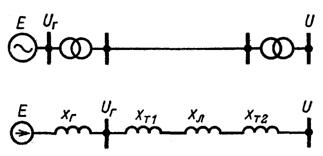
Рисунок 11.1
Построим векторную диаграмму рассматриваемой системы. Значение напряжения на шинах генераторов  можно получить, прибавляя к вектору напряжения приемника падение напряжения в суммарном индуктивном сопротивлении трансформаторов и линии Хтл = Хт1 + Хл + Хт2. Прибавляя далее к вектору падение напряжения в синхронном индуктивном сопротивлении генератора Хг, находим ЭДС генератора в данном режиме. Вектор напряжения на шинах генератора делит вектор полного падения напряжения
можно получить, прибавляя к вектору напряжения приемника падение напряжения в суммарном индуктивном сопротивлении трансформаторов и линии Хтл = Хт1 + Хл + Хт2. Прибавляя далее к вектору падение напряжения в синхронном индуктивном сопротивлении генератора Хг, находим ЭДС генератора в данном режиме. Вектор напряжения на шинах генератора делит вектор полного падения напряжения  на два отрезка: IХтл и IХг – в отношении значений индуктивных сопротивлений Хтл и Хг. При увеличении угла δ на Δδ вектор ЭДС генератора займет новое положение, показанное на диаграмме (см. рисунок 11.2) штриховой линией. Положение вектора напряжения генератора в новом режиме можно найти, разделив в том же отношении значений индуктивных сопротивлений Хтл и Хг вектор полного падения напряжения, соединяющий концы векторов и .
на два отрезка: IХтл и IХг – в отношении значений индуктивных сопротивлений Хтл и Хг. При увеличении угла δ на Δδ вектор ЭДС генератора займет новое положение, показанное на диаграмме (см. рисунок 11.2) штриховой линией. Положение вектора напряжения генератора в новом режиме можно найти, разделив в том же отношении значений индуктивных сопротивлений Хтл и Хг вектор полного падения напряжения, соединяющий концы векторов и .
Как вытекает из диаграммы, вектор напряжения при увеличении угла δ поворачивается, следуя за вектором , и при этом уменьшается. Этот вывод справедлив для напряжения любой другой точки схемы электропередачи: на шинах подстанции, на линии и т.д.
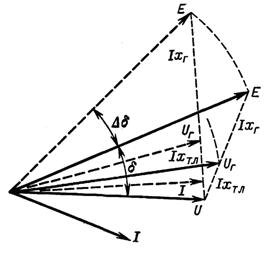
Рисунок 11.2
При наличии у генераторов автоматических регуляторов возбуждения контролирующих напряжение Uг, регуляторы, реагируя на понижение напряжения при возрастании угла δ, будут увеличивать ток возбуждения генераторов, а с ними ЭДС до тех пор, пока не восстановят прежнего значения напряжения.
Рассматривая установившиеся режимы работы генератора с АРВ при различных значения угла δ, исходят из постоянства напряжения Uг. Значение же ЭДС генератора при этом будет возрастать с увеличением угла δ. На рисунке 11.3 показано семейство характеристик Р = f (δ), построенных для различных значений ЭДС.
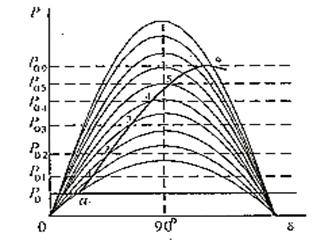
Рисунок 11.3
Если принять за исходную точку нормального режима точку а, то при увеличении мощности Ро (сопровождающемся увеличением угла δ) точки новых установившихся режимов будут определяться переходом с одной характеристики на другую в соответствии с векторной диаграммой (см. рисунок 11.2). Соединив между собой точки установившихся режимов при разных уровнях возбуждения, получим внешнюю характеристику генератора. Она возрастает даже в области углов δ > 90 о, и ее максимум достигается при угле δг = 90 о, где
δг – угол вектора напряжения на шинах генератора Uг. Но возможность работы в области углов больших 90о зависит от типа регулятора возбуждения.
11.3 Типы автоматических регуляторов возбуждения (АРВ)
В настоящее время применяются два типа АРВ – пропорционального и сильного действия.
АРВ сильного действия дают принципиальную возможность поддерживать практически постоянное напряжение на шинах генераторов или на стороне высшего напряжения трансформатора во всех режимах.
АРВ пропорционального действия поддерживают близкой к постоянной ЭДС (Eq ≈ const).
Параметрами АРВ являются коэффициенты усиления и постоянные времени его элементов.
Коэффициенты усиления по отклонению определяют точность поддержания напряжения при изменении установившегося режима, меняют параметры установившегося режима, деформируют статические характеристики системы: P (δ), U (δ), U (P), Q (δ) и др.
Коэффициентами усиления по производным называются коэффициенты стабилизации. Эти коэффициенты, не меняя статических характеристик, деформируют динамические характеристики системы и вводят в систему положительное демпфирование. Благодаря этому улучшается затухание переходных процессов.
В проектных расчетах синхронную машину представляют схемой замещения: U = const, Хг = 0 (АРВ сильного действия) или Е'q = const, Хг = Х'd (АРВ пропорционального действия).