 2014-02-24
2014-02-24 3892
3892В зависимости от вида измерений космические геодезические построения можно подразделить на три вида:
1. Космическая триангуляция
2. Космическая трилатерация
3. Комбинированные построения.
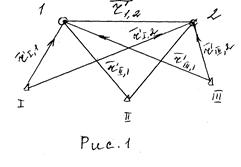
Основными элементами космических геодезических построений являются:
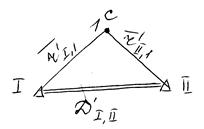
1. Вектор, соединяющий 2 пункта наблюдений
2. Вектор, соединяющий пункт наблюдений и ИСЗ
3. Плоскость синхронизации.
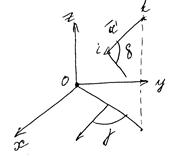
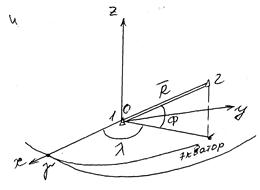 Направление хорды (1,2), соединяющей 2 пункта, характеризуется ориентирующими углами:
Направление хорды (1,2), соединяющей 2 пункта, характеризуется ориентирующими углами:
Ф- наклон хорды к экватору
λ- угол между осью ОХ и
проекцией хорды на плоскость экватора.
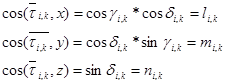
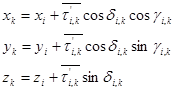
Кроме того, направление хорды характеризуется направляющими косинусами орта (единичный вектор) «пункт-пункт».

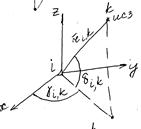
Аналогичным образом направление «пункт-спутник» характеризуется направляющими косинусами орта «пункт-спутник».
 (2)
(2)
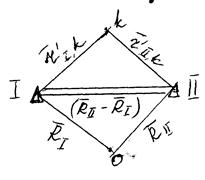
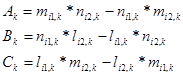
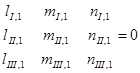
Если в результате наблюдений определены направления на одно и тоже положение спутника k с 2х пунктов i1, i2 , то получим плоскость синхронизации (I-II), уравнение которой в координатной форме будет:

Где коэффициенты Ak Bk Ck функции направляющих косинусов, вычисленных с использованием измеренных величин по формулам:
 (4)
(4)
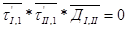
В векторном виде уравнения плоскости синхронизации выражается равенством 
Если наблюдения выполнены синхронно, то все векторы лежат в одной плоскости, т.е. компланарны.
Космическая триангуляция.
Возможны 3 вида элементарных фигур космической триангуляции, построенной по фотографическим наблюдениям ИСЗ:
1. Пространственная угловая засечка
2. Угловая засечка хорд
3. Пересечение плоскостей синхронизации.
Идея космической триангуляции принадлежит финскому геодезисту И. Вяйсяля. Суть ее заключается в том, что при одновременных фотографических наблюдениях ИСЗ из разных пунктов земной поверхности по известным координатам некоторых из них, можно вычислить координаты ИСЗ и координаты определяемых пунктов.
1). Пространственная угловая засечка
Два пункта, исходный, один определяемый.
Необходимо наблюдать спутник в 2х
положениях или наблюдать 2 разных ИСЗ.
Недостаток:
синхронность наблюдений с трех пунктов.
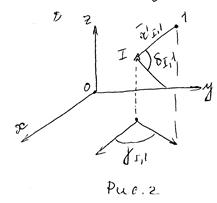
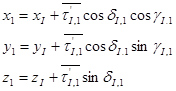
Согласно рис.2 по каждому направлению имеем:
 (5)
(5)
Если определить x, y,z по наблюдениям со второго пункта, то:
 (6)
(6)
Так как левые части равенств (5) и (6) равны, то прировняв правые, получим систему из 3х уравнений, в которых 2 неизвестных  , которые найдем в этом случае с контролем.
, которые найдем в этом случае с контролем.
Необходимым условием реализации рассмотренного построения является фиксирование моментов каждого наблюдения ИСЗ. Основной трудностью практического осуществления данного построения состоит в обеспечении одновременной видимости спутника с трех станций, удаленных на значительные расстояния. Более гибким в этом отношении является метод хорд.
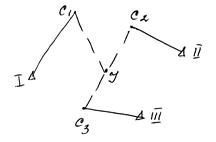
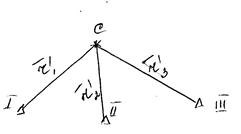
2.) Угловая засечка хорд.
Достаточно выполнить наблюдения двух положений спутника одновременно с определяемого и одного из исходных пунктов.
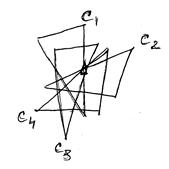
В этом методе получим хорду, как линию, образованную от пересечения плоскостей синхронизации. Например, на рис плоскость синхронизации IC2 A пересекаются, образуя хорду IA, для которой ориентирующие углы λI,A ФI,A, необходимо определить.
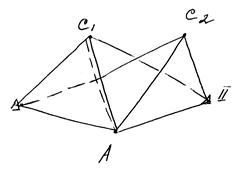
Для этого выполняются 2 пары синхронных наблюдений с I и A, а затем со II и А. Фактически, наблюдения необходимо выполнить с трех пунктов, но обеспечить одновременную синхронизацию наблюдений только с двух пунктов. Тогда:
 (7)
(7)
Где 

С учетом этого и полагая, что N≠0, получим:
По аналогичным формулам находят λII,A ФII,A. Затем по формулам пространственной угловой засечки вычисляют координаты искомого пункта.
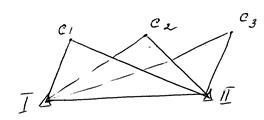
3.) Пересечение плоскостей синхронизации
Очень часто возникает ситуация, когда:
В зависимости от удаленности пунктов
наблюдений друг от друга; в зависимости
от характера траектории ИСЗ; в зависимости
от условий видимости спутников и от
ряда других причин может оказаться, что каждое положение спутника можно наблюдать только с двух пунктов, определяемого и исходного. Для такого случая, уравнения трех плоскостей синхронизации будут иметь вид:
 где
где 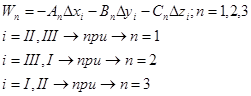
Комбинированные построения.
1). Линейно-угловая пространственная засечка.
 Пусть на пункте i из фотографических
Пусть на пункте i из фотографических
наблюдений определены  и с
и с
помощью лазера измерено расстояние  .
.
Тогда координаты ИСЗ найдем по формулам:
По аналогичным формулам можно найти координаты пункта, если известны координаты ИСЗ.
2). Пространственная линейная засечка (космическая трилатерация).
Рассмотрим случай определения положения спутника, когда направления с пунктов на ИСЗ неизвестны, а измерены расстояния (дальности). Тогда положение ИСЗ (xc, yc zc):



По аналогичным формулам можно решить обратную задачу, т.е. по измеренным дальностям и координатам нескольких ИСЗ, определить координаты пункта.
На этом принципе работают системы GPS и ГЛОНАСС.
Виды условий, возникающих в космических геодезических построениях.
В космических геодезичеких построениях возникают такие же условия, как и в триангуляции: полюсное, базисное, координатное. Кроме того:
1). Компланарность 3х векторов заключается в том, что при синхронных наблюдениях с двух пунктов векторы «пункт-спутник» и «пункт-пункт» должны лежать в одной плоскости:
 или в матричной форме
или в матричной форме
2). Компланарность пучка плоскостей заключается в том, что все плоскости синхронизации, образующиеся при наблюдении ИСЗ, должны пересекаться по одной хорде.
 где Ai Bi Ci- коэффициенты уравнения
где Ai Bi Ci- коэффициенты уравнения
плоскости синхронизации.
3). Компланарность связки плоскостей – это условие состоит в том, что плоскости, содержащие какой-либо пункт должны пересекаться в одной точке, т.е. в этом пункте (число плоскостей более 3х).
Тогда:
Основы проектирования космических геодезических сетей.
В зависимости от поставленных задач могут применяться три вида космических геодезических сетей:
1. Сплошные сети, которые создаются для обеспечения единой системой координат значительных территорий на поверхности Земли и для получения системы пунктов определенной плотности.
2. Прокладка векторных ходов для передачи координат на значительные расстояния при установлении связей между различными геодезическими системами.
3. Отдельные фигуры для определения положений отдельных пунктов, например, для привязки островов.
Создание космических геодезических построений начинается с составления проекта, в процессе разработки которого решаются следующие задачи:
1. в соответствии с поставленной задачей выбирается вид построений;
2. определяется необходимая плотность пунктов и точность определения их координат;
3. с учетом минимума затрат определяют положение, в которых следует наблюдать ИСЗ и устанавливают требования к параметрам орбиты ИСЗ
4. выполняют согласование оптимизации положений ИСЗ и условий видимости с указанием минимальных высот ИСЗ над горизонтом.
Построение мировой геодезической системы и сетей сгущения.
В 1963г. На XIII ассамблее (МГА) были выдвинуты предложения по построению мировой геодезической сети. В связи с этим, в 1964г. В США была разработана национальная геодезическая спутниковая программа, согласно которой запроектирована сеть, состоящая из 86 опорных пунктов на поверхности Земли, для которой необходимо было определить геоцентрические координаты всех пунктов с точностью ≈10м.
Для реализации этого проекта на первом этапе в США в 1966г. Были запущены «спутники-баллоны» и начаты работы по программе, которая называется «PAGEOS». В настоящее время эти работы завершены. Точность определения координат сети, состоящей из более чем 40 пунктов с расстояниями между ними 2÷5тыс.км, характеризуются следующими ошибками:
Точность определения пункта по высоте ±5,6м, по долготе и широте ±3,1м.
В 1965г. В СССР Жонголевичем был предложен проект мировой геодезической сети из 12 пунктов с длинами хорд 6700км. Среднее расстояние между пунктами по поверхности Земли составляет 14000км. Если при этом наблюдать ИСЗ на высоте примерно 12300км, то соответственно получим угол засечки при ИСЗ≈28°. Этот проект пока не реализован.
Кроме того, в 1969г. Жонголевич предложил проект геодезического векторного хода «Арктика-Антарктика». Длина хода 17000км. Средняя длина отдельной хорды около 2200км. Этот проект так же пока не реализован.
Лекция 15. Геодезические выводы, полученные на основе спутниковых наблюдений. Основные направления и перспективы развития космической геодезии.
1. Результаты решения геометрических задач космической геодезии.
В США построена геодезическая сеть по программе PAGEOS. Разработаны глобальные навигационные системы: GPS в США и ГЛОНАСС в России. Во Франции геометрическим методом космической геодезии была установлена связь между 4мя пунктами, расстояние между которыми составляет сотни км.
В СССР совместно со странами Европы была построена экспериментальная сеть космической триангуляции, включающая пункты: Звенигород, Николаев, Рига, Ужгород, Бухарест, Познань, Прага.
2. Результаты решения динамических задач космической геодезии.
После запуска первых ИСЗ ученые разных стран начали проводить эксперименты по определению параметров геопотенциала. В первую очередь удалось уточнить значение полярного сжатия Земли. В дальнейшем была подтверждена эллиптическая форма экватора и обнаружена ассиметрия северного и южного полушарий («грушевидность» Земли).
3. Геофизические выводы, полученные на основе спутниковых наблюдений.
Установлено, что положительные аномалии силы тяжести характерны для областей вулканической и тектонической активности, а отрицательные для океанических впадин. Анализ спутниковых наблюдений позволил заключить, что в мантии Земли существуют различные течения, характеризующиеся скоростью ≈1см/год.
4. Основные направления и перспективы развития космической геодезии.
· Дальнейшее совершенствование фотографической, лазерной и радиотехнической аппаратуры.
· Повышение точности геометрических методов космической геодезии.
· Совершенствование глобальных навигационных систем.
· Дальнейшее изучение геопотенциала и внутреннего строения Земли.
· Изучения движения материков, земных полюсов и природных ресурсов путем фотографирования из космоса.
· Дальнейшее уточнение фундаментальных постоянных геодезии и астрономии.








