 2014-02-12
2014-02-12 2224
2224При реализации реальных автоматических регуляторов не всегда точно удается обеспечить тот или иной желаемый типовой закон регулирования. Это объясняется в первую очередь инерционностью исполнительных механизмов, а при реализации дифференциальной составляющей закона регулирования–невозможностью практической реализации идеального дифференцирующего звена. В связи с этим важно определить степень погрешности в формировании законов регулирования промышленными регуляторами.
Рассмотрим общий принцип построения желаемой структуры автоматических регуляторов. При охвате какого-либо участка схемы с передаточной функцией Wу.с.(р), состоящего из нескольких звеньев, отрицательной обратной связью Wо.с(р), передаточная функция такого соединения будет равна
 (1)
(1)
 или
или
(1.1)
2. Пропорциональные регуляторы
Идеальный П-регулятор имеет передаточную функцию вида Wп(р)=k(р). Реальный аналоговый промышленный регулятор должен иметь усилительное звено с передаточной функцией Wу(р)=kу и исполнительное устройство, например в виде электрического исполнительного механизма (ИМ) с передаточной функцией WИМ=1/ТИМр. Электрический ИМ является интегрирующим звеном, и, следовательно, для получения П-закона регулирования его необходимо охватить отрицательной обратной связью. Для обеспечения условия Wо.с.(р)>>1/ Wу.с.(р) (1.11) с целью повышения коэффициента передачи прямого канала этой отрицательной обратной связью следует охватить и усилительное звено с передаточной функцией Wу.(р)=kу регулятора.
Требуемую передаточную функцию канала обратной связи найдем из условия:
WП(p)=kp=1/Wo.c.(p),
откуда
Wo.c.(p)=1/ kp= ko.c (1.2)
Таким образом, канал обратной связи должен быть выполнен в виде усилительного звена с коэффициентом передачи ko.c=1/ kp, т. е. равным обратному значению коэффициента передачи П-регулятора.
С учетом изложенного структурная схема реального П-регулятора должна иметь вид, представленный на рис. 2.
Оценим точность реализации П-закона регулирования реальным П-регулятором со структурной схемой, приведенной на рис.2.
Найдем передаточную функцию П-регулятора:
 |
(1.3)
Таким образом, реальный П-регулятор со структурной схемой на рис.2 представляется в виде последовательного соединения П-регулятора с передаточной функцией
WП(p)= kp= 1/ ko.c. (1.4)
и некоторого балластного звена с передаточной функцией
Wб(p)=1/(Tбp+1) (1.5)
Балластное звено является апериодическим звеном. Коэффициент передачи балластного звена равен единице, а постоянная времени
Tб=ТИМ/kу kо.с. (1.6)
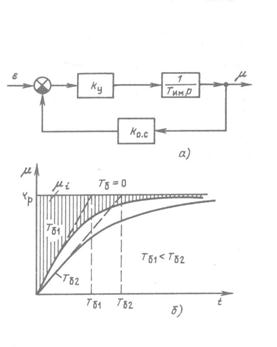 |
Рис. 2. Структурная схема П-регулятора (а) и реализуемый ею закон П-регулирования (б).
Переходная характеристика реального П-регулятора со структурной схемой, приведенной на рис. 2 ,а представлена нарис.2, б.
Параметром настройки регулятора является коэффициент передачи ko.c устройства обратной связи.
Чем меньше (больше) ko.c, тем больше (меньше) коэффициент kp передачи регулятора (1.4)
Одновременно следует иметь в виду, что чем больше kp, тем больше постоянная времени (1.6) балластного звена и тем больше искажается идеальный закон П-регулирования.
Для уменьшения влияния балластного звена при конструировании П-регулятора по структурной схеме, приведенной на рис. 2, а, следует стремиться к максимально возможному значению коэффициента усиления ky.
Текущее значение μi динамической ошибки реализации закона П-регулирования при Tб = Tб1 показано на рис. 2 ,6.

