 2014-02-12
2014-02-12 2180
2180

 или
или
(2)
При соблюдении условия (1.11) приближенную передаточную функцию (2) можно
записать в виде
Wр(p) = kp + 1/(Ти р) + kдTд р/(Tдр + 1) (2.1)
Параметрами настройки ПИД-регулятора являются kp, Ти, kд и Тд..
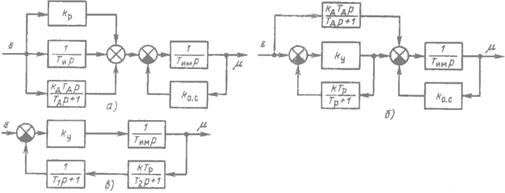 |
Рис. 5. Характер реализации закона ПИД-регулирования регулятором со структурной схемой, приведенной на рис. 3,11.
Для практической реализации закона ПИД-регулирования применяются или ПИД-регуляторы (рис. 5, а и б) или ПИ-регуляторы (рис. 3, а и б) в комплекте с дифференциаторами Wд(р)=kД ТДр/(ТДр+1).
На рис.5, в представлена структурная схема, в которой закон ПИД-регулирования реализуется за счет динамических свойств канала обратной связи, охватывающего как усилительную, так и исполнительную часть регулятора.
Для реализации ПИД-регулятора со структурной схемой, приведенной на рис. 5, необходимо, чтобы канал обратной связи состоял из последовательно включенных апериодического и реального дифференцирующею звеньев.
Так как условие (1.11) в структурной схеме на рис. 5, в реализуется приближенно, то исполнительный механизм вносит искажения в закон ПИД-регулирования. Фактическая реакция регулятора на ступенчатое входное воздействие имеет вид кривой 1. на рис. 6 при идеальной реакции ПИД-регулятора, представленной прямыми 2.
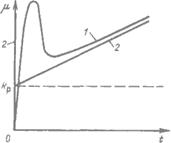 |
Рис. 6. Характер реализации закона ПИД-регулирования
регулятором со структурной схемой, приведенной на рис. 3,а.
Таким образом, реальные ПИД-регуляторы со структурными схемами на рис. 5 реализуют законы ПИД-регулирования с погрешностью, зависящей от степени соблюдения условия (1.11) и параметров настройки дифференцирующей части в схемах на рис. 5, а и б.
Следует отметить, что промышленные ПИД-регуляторы со структурными схемами на рис. 5, а и б могут реализовать различные законы регулирования с любым сочетанием из П-, И- и Д-составляющих закона ПИД-регулирования.

