 2014-02-13
2014-02-13 793
793Сначала будем рассматривать систему без канала возмущения, т.е. w=0 (рисунок 2).
1. Определение начальных значений переменных:

2. Формирование внешнего воздействия  .
.
3. Расчет выходной величины системы регулирования:

4. Расчет ошибки регулирования:
5. Определение момента окончания переходного процесса
 .
.
6. Расчет управляющего воздействия
6.1. Расчет приведенного возмущения:
 ;
;
6.2. Экстраполяция приведенного возмущения:
 .
.
 ; где
; где 
В качестве управляющего воздействия принимается экстраполируемое значение  .
.
7. Проверка условия окончания расчетов (либо по длине реализации, либо по заданному критерию). Если нет – переход к пункту 2 если да – к пункту 8.
8. Вывод результатов моделирования.
Выполнив данный алгоритм, получим переходный процесс, представленный на рисунке 3.
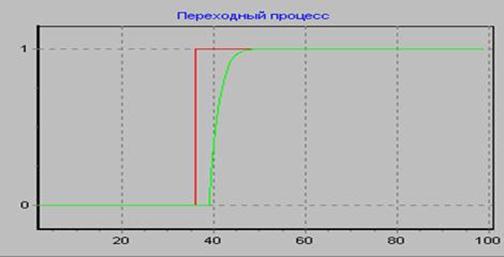
Рисунок 3 – Переходный процесс без учета возмущения
Длительность переходного процесса равна:  , где 43,9 – момент окончания переходного процесса, 36 – начало действия внешнего воздействия, 3 – запаздывание.
, где 43,9 – момент окончания переходного процесса, 36 – начало действия внешнего воздействия, 3 – запаздывание.
Вывод: Так как длительность переходного процесса не превышает заданной  , то следовательно, синтезированная САР удовлетворяет заданным ограничениям на качество регулирования.
, то следовательно, синтезированная САР удовлетворяет заданным ограничениям на качество регулирования.
Рассмотрим теперь систему с учетом контура возмущения (т.е. w<>0).
Тогда общая структура САР будет иметь вид, как на рисунке 4.
 |
Рисунок 4 – Структура САР с учетом канала возмущения.
 - компенсатор контролируемого возмущения.
- компенсатор контролируемого возмущения.
Он представляет собой последовательное соединение трех блоков:
1. Прямая модель канала возмущения:  , где
, где  - дискретный аналог времени отсечки;
- дискретный аналог времени отсечки;
2. Обратная модель канала управления:
3. Звено запаздывания:
 , где
, где  - дискретный аналог запаздывания в канале возмущения.
- дискретный аналог запаздывания в канале возмущения.
Алгоритм моделирования состоит в следующем:
1. Определение начальных значений переменных:

2. Формирование возмущающего воздействия  . Задающее воздействие отсутствует
. Задающее воздействие отсутствует  .
.
3. Расчет выходной величины канала управления:
4. Расчет выходной величины канала возмущения:

5. Расчет общей выходной величины:

6. Расчет ошибки регулирования:

7. Определение момента окончания переходного процесса
.
8. Расчет управляющего воздействия регулятора Ресвика:
.
; где
9. Расчет управляющего воздействия компенсатора:
10. Расчет общего управляющего воздействия:

11. Проверка условия окончания расчетов (либо по длине реализации, либо по заданному критерию). Если нет – переход к пункту 2 если да – к пункту 8.
12. Вывод результатов моделирования.
Выполнив данный алгоритм, получим переходный процесс, представленный на рисунке 5.
Длительность переходного процесса равна:  , где 51 – момент начала действия возмущающего воздействия, 63,9 – окончание переходного процесса, 4,5 – запаздывание в канале возмущения.
, где 51 – момент начала действия возмущающего воздействия, 63,9 – окончание переходного процесса, 4,5 – запаздывание в канале возмущения.
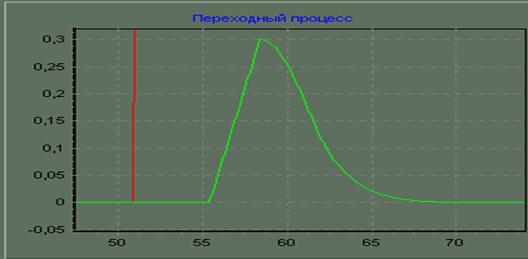 |
Рисунок 5 –Переходный процесс с учетом канала возмущения








