 2014-02-13
2014-02-13 11458
11458Принцип действия и конструкция. Индукционным преобразователем называется преобразователь, принцип действия которого основан на законе электромагнитной индукции. Преобразователь имеет катушку. При воздействии входной величины на преобразователь изменяется Потокосцепление катушки с внешним по отношению к катушке магнитным нолем. При этом в катушке наводится ЭДС
e=-dψ/dt (27)
Потокосцепление
ψ=wФ=wBQ (28)
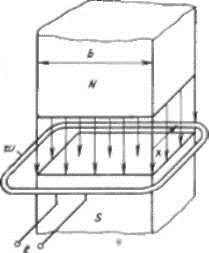
Рис 15
где w — число витков катушки; Ф — проходящий через нее поток; Q — площадь, через которую проходит этот поток; В — индукция магнитного поля.
ЭДС в катушке может наводиться при изменении во времени любой из перечисленных величин w, В, Q.
В качестве примера рассмотрим преобразователь, который представляет собой магнитную систему с постоянным магнитом, в воздушном зазоре которой перемещается катушка (рис. 15). При движении катушки с изменением х изменяется площадь катушки, находящейся в магнитном поле, Q = bх. Это приводит к изменению потокосцепления ψ = wBbx, и в катушке наводится ЭДС
e=-dФ/dt=-wBb(dx/dt) (29)
Индукционные преобразователи служат для преобразования линейной dx/dt или угловой da/dt скорости перемещения катушки относительно магнитного поля в ЭДС. Они являются генераторными преобразователями и преобразуют механическую энергию в электрическую.
Различают ряд типов преобразователей:
- Преобразователи скорости вибрации
- Тахометрические преобразователи
- Импульсные преобразователи
Погрешность индукционных преобразователей. ЭДС индукционных преобразователей пропорциональна скорости перемещения катушки лишь при условии, что индукция В постоянна на протяжении всего пути ее перемещения. Непостоянство индукции вызывает возникновение погрешности.
Погрешность индукционных преобразователей также во многом зависит от тока, который потребляет вторичный преобразователь. Проходя по измерительной обмотке индукционного преобразователя, этот ток создает магнитное поле, которое согласно правилу Ленца направлено встречно направлению основного поля и производит размагничивающее действие. Вследствие этого суммарная индукция уменьшается, уменьшается и ЭДС преобразователя. Это явление, имеющее место в электрических машинах и, в частности, в тахометрических преобразователях называется реакцией якоря. Вследствие реакции якоря уменьшается чувствительность тахометрического преобразователя и его функция преобразования становится нелинейной, что приводит к погрешности. Для уменьшения погрешности следует уменьшить ток преобразователя. Имеются также конструктивные методы уменьшения этой погрешности.
Магнитоупрутие преобразователи
Принцип действия и конструкция. Работа магнитоупругого преобразователя основана на магнитоупругом эффекте. Как известно, ферромагнитные вещества имеют области самопроизвольного намагничивания (домены). В не намагниченном состоянии вещества домены ориентированы хаотично и магнитные моменты отдельных доменов компенсируют друг друга. При помещении ферромагнитного тела в магнитное поле домены ориентируются в его направления. В слабом поле ориентация частичная; в сильном поле при магнитном насыщении материала ориентируются все домены. Ориентация доменов вызывает увеличение магнитной индукции, характерное для ферромагнитных материалов.
Если на намагничен!п>1й образец ферромагнитного тела воздействовать внешней механической силой, то тело деформируется, домены изменят свою ориентацию и индукция в материале изменяется. Явление имеет упругий характер. Если силу снять, то индукция примет прежнее значение. Поскольку абсолютная магнитная проницаемость вещества
μa=μrμ0=B/H (30)
то при заданной напряженности поля Hизменение индукции В эквивалентно изменению магнитной проницаемости.
Изменение индукции или магнитной проницаемости в ферромагнитных телах при действии на них силы называется магнитоупругим эффектом.
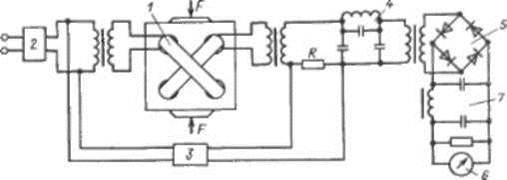
Рис 16
Схемы включения. Магнитоупругие индукционные преобразователи включаются в мостовые измерительные цепи. В плечо,смежное с измерительным преобразователем, включается такой же преобразователь для компенсации аддитивных погрешностей. Он обычно не нагружается — прибор строится по дифференциальной схеме первого типа. Питание моста производится от феррорезонансного стабилизатора.
Схема включения трансформаторного магнитоанизотропного преобразователя приведена на рис 16. Первичная обмотка 1 питается от феррорезонансного стабилизатора 2. На выходе у ненагруженного преобразователя имеется некоторое остаточное напряжение. Для его компенсации в цепь включен резистор R, на который подается напряжение через фазосдвигающую цепочку 3, Напряжение питания преобразователя выбирается так, чтобы режим его работы был близок к режиму насыщения магнитной цепи. При этом на выходе преобразователя имеется напряжение верхних гармоник значительной величины. Для зашиты от гармоник схема содержит фильтр верхних частот 4. Напряжение выпрямляется двухполупериодным выпрямителем 5 и подается на магнитоэлектрический измерительный механизм 6. Фильтр нижних частот 7 служит для сглаживания пульсаций выпрямленного напряжения. При измерении быстропеременных процессов в качестве измерительного механизма включается гальванометр свeтолучевого осциллографа.
Магнитоупругие трансформаторные преобразователи могут работать также с автоматическими потенциометрами переменного тока.
Погрешность магнитоупругих преобразователей. Ф ункция преобразования магнитоупругих преобразователей, как правило, нелинейна. Имеется ряд методов уменьшения нелинейности. Нелинейность уменьшается при сокращении диапазона измерения измеряемой силы; если наряду с измеряемой силой преобразователь нагружается некоторой дополнительной постоянной силой; при соответствующем выборе магнитного режима преобразователя; при применении магнитоанизотропных материалов, имеющих различную магнитную проницаемость в различных направлениях. Такие материалы получают в результате определенной технологической обработки — ковки, протяжки, прокатки и т. д. Применение этих мер позволяет уменьшить погрешность, происходящую вследствие нелинейности, до 1,5 —2 %.
Функция преобразования при увеличении нагрузки магнитоупругих преобразователей отличается от функции преобразования при уменьшении нагрузки. Это отличие имеет гистерезисный характер и обусловлено магнитным и механическим гистерезисом. При статических измерениях гистерезис преобразователя больше, чем при динамических. Для уменьшения погрешности, вызванной гистерезисом, рекомендуется изготавливать преобразователи из материалов, имеющих возможно больший предел упругости и возможно меньшую петлю магнитного гистерезиса. Максимальные механические напряжения в магнито упругом материале должны быть в 6-1 раз меньше его предела упругости. Погрешность, обусловленная гистерезисом, уменьшается после тренировки преобразователя. Тренировка производится 5—10-кратным нагружением силой, соответствующей пределу изменения преобразователя. Гистерезис может возникнуть также в результате сип трения, если, например, магнитопровод не сплошной, а составной. Приведенную погрешность, вызванную гистерезисом, можно снизить до 0,5-1 %.
При изменении температуры изменяются магнитная проницаемость магнитопровода и электрическое сопротивление обмоток. При резко выраженном поверхностном эффекте изменение температуры оказывает меньшее влияние, чем при слабо выраженном. Для уменьшения температурной погрешности используются дифференциальные схемы и специальные схемы температурной компенсации.
Термоэлектрические преобразователи
Принцип действия и конструкция. Термоэлектрический преобразователь представляет собой термопару, состоящую из двух разнородных проводников Р и Q, соединенных между собой в двух точках, как схематически показано на рис. 17. На границе раздела двух различных металлов имеется контактная разность потенциалов EpQ (t), зависящая от рода металлов и от температуры контакта. В цепи, показанной на рис. 17, а, контактные разности потенциалов образуются в точках I и 2. Если t1 = t2то они равны между собой и, будучи противоположно направленными, взаимно уравновешиваются. Если же t1и t2 не равны в цепи развивается результирующая ЭДС
E=EPQ(t1) – EPQ(t2) (31)
называемая термоэлектродвижущей силой (термоЭДС). Места контактов называются спаями термопары.
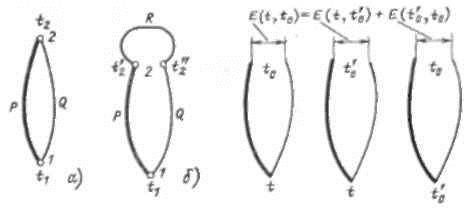
Рис 17 Рис 18
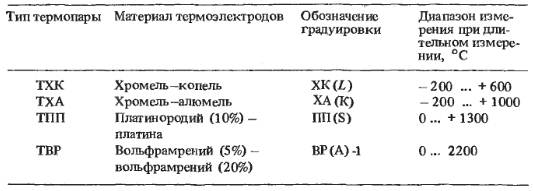
Термоэлектрические преобразователи используются для измерительного преобразования температуры в ЭДС. В таблице приведены наиболее широко используемые термопары (ГОСТ 6616-84) и их основные характеристики (ГОСТ 3044-84).
Градуировочные характеристики и допустимые погрешности этих термопар также приведены в ГОСТ 3044-84.
Термоэлектрический датчик обычно называется термопарой. Устройство промышленной термопары показано на рис.19. Термоэлектроды изолируются друг от друга керамическими бусами 2 или керамической трубкой; одним своим концом они свариваются, другим -подсоединяются к зажимам в головке 3, служащей для подключения внешних проводов. Термоэлектроды помешаются в защитный чехол 4 (трубку, закрытую с одной стороны). Чехол делается из жаропрочной стали, а при измерении очень больших температур - из керамики или кварца.
Место соединения термоэлектродов называется горячим или рабочим спаем.
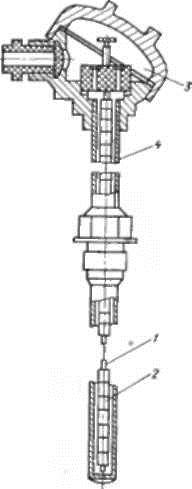
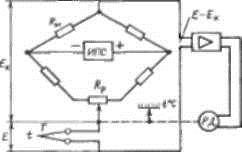
Рис 19 Рис 20
Схемы включения. Рабочий конец термопары погружается в среду, температуру которой требуется измерить. Свободные концы подключаются к вторичному прибору. Если температура свободных концов постоянна, то подключение может быть сделано медным проводом, а если не постоянна, то оно выполняется специальными удлинительными (компенсационными) Проводами. В качестве последних используются два провода из различных материалов. Провода подбираются так, чтобы при температуре свободных спаев и в паре между собой они имели такие же термоэлектрические свойства, как и рабочая термопара. При подсоединении к термопаре компенсационные провода удлиняют ее и дают возможность отвести холодный спай образованной составной термопары в такое место, где температура остается постоянной.
В качестве вторичных преобразователей используются либо магнитоэлектрические милливольтметры, либо потенциометры постоянного тока.
Погрешность термоэлектрического термометра. Одним из источников погрешности термоэлектрического термометра является несоответствие температуры свободных концов термопары температуре, при которой была произведена градуировка.
Номинальная функция преобразования термопар со стандартной градуировкой задается градуировочной таблицей. Она определяет зависимость ЭДС E(t,t0) термопары от измеряемой температуры t при температуре свободных спаев to = 0 °С. Если в условиях измерения температура свободных спаев t'0 не равна температуре Го. то ЭДС термопары E{t, to) отличается от ЭДС E{tt t0), которая нужна для определения температуры по стандартной градуировке.
Вследствие неравенства температур t0 Ф t'0 показание пирометрического милливольтметра не равно действительной температуре. Поправка к его показаниям приближенно может быть определена соотношением
Δt=k(t'0 - t0) (32)
где к — коэффициент, зависящий от измеряемой температуры и от вида термопары.
Для хромель-копелевой термопары он лежит в пределах 0,8—1; для хромель-алюминиевой - в пределах 0,98—1,11; для платинородий-платиновой — в пределах 0,82—1,11. При малом значении Δt = t'0 - t0 в ряде случаев можно принять к = 1. Это позволяет вводить поправку в показания пирометрического милливольтметра с помощью корректора нуля. При отключенной термопаре стрелку прибора с помощью корректора ставят на отметку, соответствующую г0. При включении термопары и измерении температуры показания пирометра будут больше не корректированных на значение Δt. Такое введение поправки целесообразно, когда значение t'0 сохраняется постоянным.

