 2014-04-09
2014-04-09 1990
1990Для решения этой задачи должны быть заданы кинематическая схема и функция перемещения начального звена φ = φ(t) − для вращательной пары или S = S(t) – для поступательной.
Кинематическая схема строится в масштабе для ряда положений (8-12 и более) механизма, соответствующим равным углам поворота начального звена за 1 оборот. При этом можно использовать графический либо аналитический способы. После построения кинематической схемы механизма сначала выполняется структурный анализ с целью проверки его на работоспособность, а затем – кинематический анализ.
Рассмотрим графический способ определения положений точек звеньев и точек на примере кривошипно-ползунного механизма (рисунок 2.1) 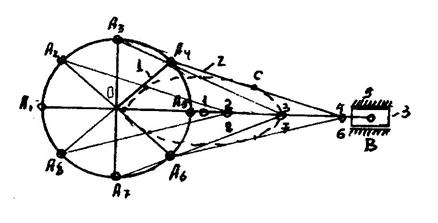
Рисунок 2.1 − Схема кривошипно-ползунного механизма
Порядок построения положений звеньев механизма можно принять следующим:
1. Наносим на чертеже неподвижные оси О и В, далее радиусом ОА проводим окружность, представляющую собой геометрическое место точек А.
2. Разбиваем окружность, на несколько равных частей (например, на 8 с точками А1…А8), для которых требуется определить положения всех звеньев механизма. Соединив последовательно начальное звено 1 в положениях А1…А8 с ползуном 3 посредством звена 2, вычерченного в масштабе, получим положение звеньев в точках 1….8.
3. По найденным положениям звеньев механизма можно построить траектории, описываемые отдельными точками звеньев (например, ползуна или точки С на звене 2), обведя последовательные положения точки, к примеру т. С плавной кривой.
Траектории точек, принадлежащих шатуну, носят названия шатунных кривых. Этими кривыми пользуются в технике для воспроизводства движения рабочих органов различных машин и механизмов.

