 2015-01-13
2015-01-13 4023
4023Движение тела с одной закреплённой точкой. Гироскопы. Прецессия гироскопа
Движение твердого тела с одной неподвижной точкой. В этом случае тело имеет три степени свободы – начала систем XYZ и x 0 y 0 z 0, введенных в начале лекции, можно совместить с точкой закрепления, а для описания движения тела использовать три угла Эйлера: j=j(t), y=y(t), q=q(t).
Для твердого тела с одной неподвижной точкой справедлива теорема Эйлера: твердое тело, закрепленное в одной точке, может быть переведено из одного положения в любое другое одним поворотом на некоторый угол вокруг неподвижной оси, проходящей через точку закрепления. Следствие из этой теоремы: движение закрепленного в точке твердого тела в каждый момент времени можно рассматривать как вращение вокруг мгновенной оси, проходящей через точку закрепления. Положение этой оси как в пространстве, так и относительно самого тела с течением времени общем случае меняется. Г М положений мгновенной оси вращения относительно неподвижной системы XYZ (или x 0 y 0 z 0) – это сложная коническая поверхность с вершиной в точке закрепления. В теоретической механике ее называют неподвижным аксоидом. Г М положений мгновенной оси вращения относительно подвижной системы xyz, жестко связанной с твердым телом, – это тоже коническая поверхность – подвижный аксоид. Линейная скорость произвольной точки твердого тела вокруг мгновенной оси: v=w´r, где r – радиус-вектор точки относительно начала системы XYZ (или x 0 y 0 z 0), совмещенного с точкой закрепления.
 |
Эти уравнения наз. уравнениями Эйлера. В ряде случаев движение с одной закр. точкой можно представить как суперпозицию 2-х вращений вокруг пересекающихся осей, угловые скорости складываются векторно.
Гироскоп – массивное аксиально-симметричное тело, вращающееся с большой угловой скоростью вокруг оси симметрии.
Если гироскоп раскручен вокруг оси симметрии, то L=Jw=const и направление оси симметрии остаётся неизменным.
Прецессия гироскопа.(к оси гир. приложена сила, линия действия которой не проходит через точку закрепления).
Ось гироскопа перемещается не в направлении сил, а перпендикулярно к ней.
Элементарная теория гир.(мгн. угловая скорость вращения и мом. импульса направлены вдоль оси симметрии, w>>W).
Мом. импульса: L=Jzw (Jz – мом. ин. относительно оси симметрии)
Рассмотрим гир, у которого точка опоры S не совпадает с центром масс О.
Мом силы тяжести: M=mglsinq, где q - угол между вертикалью и осью симметрии.
dL=M*dt, при этом и ось и L прецессируют вокруг вертикали с угл скоростью W.
dL=L sinq W dt dL= WxL dt M=WxL
Для силы тяжести:
mgl sinq = WJzw sinq
угл скорость прецессии W=mgl/ Jzw.
Если сообщить гироскопу толчок, изменяющий угол q, то прецессия перестанет быть равномерной (часто говорят: регулярной), а будет сопровождаться мелкими колебаниями вершины гироскопа – нутациями. Вектор момента импульса L описывает неподвижный в пространстве конус прецессии, и при этом ось симметрии гороскопа движется вокруг вектора L по поверхности конуса нутации. Вершина конуса нутации, как и вершина конуса прецессии, находится в точке закрепления гироскопа, а ось конуса нутации совпадает по направлению с L и движется вместе с ним. Угловая скорость нутации определяется выражением
wнут=L/Js@Jzw/Js
где Jz и Js - моменты инерции гироскопа относительно его оси симметрии и относительно оси, проходящей через точку опоры и перпендикулярной оси симметрии, w - угловая скорость вращения вокруг оси симметрии.
Раскрутим гироскоп вокруг его оси симметрии до большой угловой скорости (момент импульса L) и станем поворачивать раму с укрепленным в ней гироскопом вокруг вертикальной оси с некоторой угловой скоростью W. Момент импульса L получит при этом приращение dL, которое должно быть обеспечено моментом сил М, приложенных к оси гироскопа. Момент М, в свою очередь, создан парой сил F+ F`, возникающих при вынужденном повороте оси гироскопа и действующих на ось со стороны рамы. По третьему закону Ньютона ось действует на раму с силами Ф + Ф`. Эти силы называются гироскопическими, они создают гироскопический момент М`. Появление гироскопических сил называют гироскопическим эффектом. Именно эти гироскопические силы мы и чувствуем, пытаясь повернуть ось вращающегося колеса.
Гироскопический момент нетрудно рассчитать. Положим, согласно элементарной теории, что
L=Jw
Где J – момент инерции гироскопа относительно его оси симметрии, а w - угловая скорость собственного вращения. Тогда момент внешних сил, действующих на ось, будет равен
M=WxL=Wx(Jw)
Где W – угловая скорость вынужденного поворота (иногда говорят: вынужденной прецессии). Со стороны оси на подшипники действует противоположный момент
M`=-M= (Jw)xW
Направление гироскопических сил можно найти легко найти с помощью правилa, сформулированного Н.Е.Жуковским: гироскопические силы стремятся совместить момент импульса L гироскопа с направлением угловой скорости вынужденного поворота.
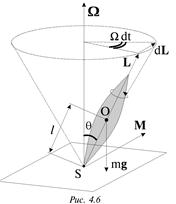 Регулярная прецессия свободного симметричного волчка. Рассмотрим тяжелый симметричный гироскоп, у которого неподвижная точка S (точка опоры о подставку) не совпадает с центром масс О (рис. 4.6). Момент силы тяжести относительно точки S: M=mg l sinq. Изменение момента импульса L определяется выражением: dL=Mdt. При этом и L, и ось волчка прецессируют вокруг вертикального направления с угловой скоростью W. Еще раз подчеркнем: делается допущение, что выполнено условие w>>W и что L постоянно направлен вдоль оси симметрии гироскопа.
Регулярная прецессия свободного симметричного волчка. Рассмотрим тяжелый симметричный гироскоп, у которого неподвижная точка S (точка опоры о подставку) не совпадает с центром масс О (рис. 4.6). Момент силы тяжести относительно точки S: M=mg l sinq. Изменение момента импульса L определяется выражением: dL=Mdt. При этом и L, и ось волчка прецессируют вокруг вертикального направления с угловой скоростью W. Еще раз подчеркнем: делается допущение, что выполнено условие w>>W и что L постоянно направлен вдоль оси симметрии гироскопа.
dL=L sinqWdt, dL=W´L dt Þ M= dL=W´L.
Это соотношение позволяет определить направление прецессии при заданном направлении вращения волчка вокруг своей оси. Обратим внимание, что M определяет угловую скорость прецессии, а не угловое ускорение, поэтому мгновенное «выключение» M приводит к мгновенному же исчезновению прецессии, то есть прецессионное движение является безынерционным.
mglsinq=WJzw sinq Þ W=mgl/Jzw

