 2015-01-13
2015-01-13 7288
7288Любые измерения содержат ошибки, поэтому измерив пеленг, дистанцию или угол и проложив на карте соответствующую изолинию, нельзя считать, что судно будет находиться на этой изолинии. Вычислить возможное смещение изолинии из-за ошибок наблюдений можно, используя понятие градиента функции.
Изобразим две изолинии, соответствующие значениям навигационных параметров U и U + ∆U (рис. 8.2). На всей изолинии значение функции навигационного параметра остается постоянным, но оно изменится при переходе на другую изолинию. Чем теснее расположены изолинии друг к другу, тем меньше расстояние ∆n между ними при заданном приращении функции ∆U, тем быстрее меняется функция в данном районе. Это изменение удобно характеризовать отношением ∆U/∆n или вектором g, направленным в сторону возрастания функции по нормали к изолинии. Вектор g называется градиентом. Таким образом, градиентом навигационного параметра называется вектор, направленный по нормали к навигационной изолинии в сторону ее смещения при положительном приращении параметра, причем модуль этого вектора характеризует наибольшую скорость изменения параметра в данном месте. Этот модуль равен
Размерность модуля градиента равна размерности параметра U на линейную величину. Направления вектора градиента и линии положения взаимно перпендикулярны, обозначается направление градиента символом r.
Если при измерении навигационного параметра U допущена ошибка ∆U и известен градиент, то смещение линии положения параллельно самой себе определяется формулой

Чем больше величина градиента g, тем меньше смещение линии положения при той же ошибке ∆U, тем точнее будет определение места судна.
Пеленг. Предположим, что наблюдатель, находившийся в точке С, переместился так, что пеленг получил приращение ∆П, град. (рис. 8.3). Следовательно, ∆U = ∆П. Из треугольника.АСС1 имеем
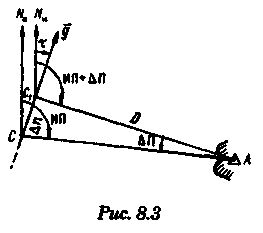 Значение модуля градиента тогда равно, град, /миля,
Значение модуля градиента тогда равно, град, /миля,

Направление градиента т = ИП - 90°.
Расстояние. При измерении расстояния ∆U = ∆D, смещение изолинии
∆n = ∆D.
Следовательно,
будет совпадать с направлением из ориентира А на точку Z, в которой находится судно (рис. 8.4). Смещение линии положения, полученной по измеренному расстоянию, зависит только от 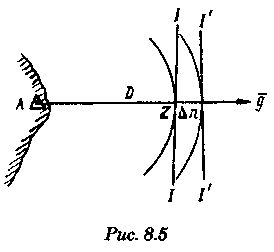 ошибки в измеренном расстоянии.
ошибки в измеренном расстоянии.
«№
23) Линия положения. Уравнение линии положения.
Линией положения называется касательная (или хорда), проведенная к изолинии вблизи счислимого места и замещающая собой изолинию.
Уравнение ЛП

24) Способы ОМС по двум линиям положения.
Способы:
Аналитический
- измеряются навигационные параметры
- по замеченным в период измерения координатам, определяем значение счислимых параметров счислимой точки.
- вычисляем приращение навигационного параметра.
- определяем модули градиентов и направление градиентов.
- рассчитываем перенос линии положения.
- составляем простые уравнения линий положения и вычисляем разность широт и отшествие по определителям 2 порядка.
25) Градиенты навигационного параметра.
26) Основные понятия и определения теории вероятности. Законы распределения случайных величин.
Частное определение: отношение числа случаев появления события A(m) к общему числу проведённых испытаний (n)
Классическое определение: отношение числа испытаний благоприятных событию A(m) к общему числу испытаний (n)
Косвенное определение вероятности: в этом случае сложные события разбиваются на несколько простых, вероятность которых подсчитывается частными или классическими, затем вероятность сложного события определяется по вероятностям составляющих его простых событий с использованием теорем сложения и умножения вероятностей.
Случайные величины и законы их распределения (СВ)
Дискретные: происходят через определённый интервал времени.
Непрерывные: непрерывные события.
Самый распространенный и наиболее общим законом распределения случайной величины при неограниченном количестве измерений наз-ся закон Гаусса.
27) Числовые характеристики случайных величин и случайных функций.
28) Измерения и наблюдения. Классификация измерения.
Дискретные – это такие измерения которые выполняются через определённый интервал времени.
Непрерывные – это те измерения которые ведутся всегда автоматизированными аппаратами.
Необходимые – это измерения минимальное количество которых обеспечивает….
Избыточные – это такие которые выполнены сверх необходимых.
Равноточные – это такие СКП результат измерения которых будет одинаковый.
По степени взаимо связи:
1) взаимонезависимы – измерение погрешности которой формируется различными факторами.
2) корреляционновзаимозависимы – это измерения в состав погрешности которых входит одна и та же общая погрешность сформирована одним и тем же фактором.
3) Функциональнозависимы – это измерения все погрешности которых формируются одним и тем же фактором.
29) Классификация погрешности и их свойства. Методы учёта систематических погрешностей.
Погрешность измерения называется разница между измеренным и истинным значением величины.
Непосредственно источник погрешности является.
- несовершенство приборов и инструментов.
- несовершенство органов чувств и не стабильность психического состояния.
- незакономерные колебания параметров внешней среды.
- нестабильность метода измерений.
- несовершенство метода измерений.
По характеру действия на величину погрешности подразделяются на:
- случайные
- систематические
систематические на:
- постоянные
- переменные
- периодические
- прогрессивные
- грубые (промахи)
30. Нормальный закон распределения погрешностей и функцию Лапласа спотреть в 25. Распределение Стьюдента
Распределе́ние Стью́дента в теории вероятностей — это однопараметрическое семейство абсолютно непрерывных распределений. Названо в честь Уильяма Сили Госсета, который первым опубликовал работы, посвящённые распределению, под псевдонимом «Стьюдент».
Пусть  — независимые стандартные нормальные случайные величины, такие что
— независимые стандартные нормальные случайные величины, такие что  . Тогда распределение случайной величины
. Тогда распределение случайной величины  , где
, где
называется распределением Стьюдента с  степенями свободы. Пишут
степенями свободы. Пишут  . Её распределение абсолютно непрерывно и имеет плотность
. Её распределение абсолютно непрерывно и имеет плотность
 ,
,
где  — гамма-функция Эйлера.
— гамма-функция Эйлера.








