 2015-02-24
2015-02-24 843
843На этапе кинематического анализа механизма, как было сказано выше, определяются траектории, скорости и ускорения характерных точек и элементов механизма. При этом силы, действующие на механизм, не учитываются. Кинематический анализ может быть выполнен графическим, графоаналитическим и аналитическим методами.
4.1 Графический метод (метод диаграмм)
Кинематические диаграммы представляют собой графическое изображение функциональных зависимостей перемещения, скорости и ускорения точек или углов поворота, угловых скоростей и ускорений звеньев от заданного параметра (времени или обобщенной координаты).
Диаграмма перемещений строится при определенном положении механизма за один цикл его движения. Диаграммы скорости и ускорений в этом случае строят путем графического дифференцирования диаграммы перемещения. Для построения диаграмм должны быть заданны кинематическая схема механизма, построенная в определенном масштабе, а также скорость ведущего звена.
Графический метод достаточно прост и нагляден, однако вследствие большого объема графических построений обладает большой трудоемкостью малой точностью, поэтому в настоящее время применяется крайне редко.
(метод построения планов скоростей и ускорений)
Данный метод применяется в случае, когда возникает необходимость определить скорости и ускорения характерных точек механизма и угловых скоростей и ускорений его звеньев в определенный момент времени, соответствующий определенному положению механизма. Построение планов скоростей и ускорений основывается на известных теоремах теоретической механики о скоростях и ускорениях точек твердого тела. Если известна скорость какой-либо точки твердого тела принимаемой за полюс, то скорость любой другой точки будет равна векторной сумме скорости полюса и относительной скорости рассматриваемой точки относительно полюса. Если в качестве полюса выбрать точку P (Рис 4.1а), скорость которой равна  , то скорость произвольной точки A будет:
, то скорость произвольной точки A будет:
 , (4.1)
, (4.1)
где  -скорость точки A относительно точки Р.
-скорость точки A относительно точки Р.
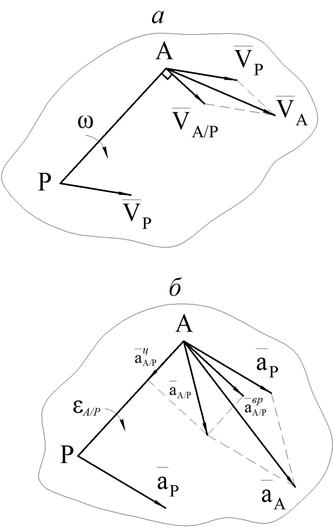

Рис. 4.1
С другой стороны в твердом теле расстояния между любыми точками в процессе движения остаются постоянными. Следовательно точка А в относительном движении может двигаться только по дуге окружности радиуса РА с центром в полюсе Р с угловой скоростью  . Тогда
. Тогда
 (4.2)
(4.2)
Направление относительной скорости  будет перпендикулярно линии РА, соединяющей полюс Р с точкой А. Абсолютное значение скорости точки А определяется по правилу параллелограмма (Рис 4.1а).
будет перпендикулярно линии РА, соединяющей полюс Р с точкой А. Абсолютное значение скорости точки А определяется по правилу параллелограмма (Рис 4.1а).
Ускорение произвольной точки А твердого тела можно определить по аналогичной формуле:
 (4.3)
(4.3)
где  - абсолютное ускорение точки А,
- абсолютное ускорение точки А,  -абсолютное ускорение полюса,
-абсолютное ускорение полюса,  - относительное ускорение точки А по отношению к полюсу. Относительное ускорение в этом случае будет складываться из центростремительного -
- относительное ускорение точки А по отношению к полюсу. Относительное ускорение в этом случае будет складываться из центростремительного -  направленного из точки А к точке Р и вращательного -
направленного из точки А к точке Р и вращательного -  направленного перпендикулярно прямой АР в сторону, задаваемую направлением углового ускорения
направленного перпендикулярно прямой АР в сторону, задаваемую направлением углового ускорения  как показано на (Рис 4.1б). Величина центростремительной составляющей будет равна
как показано на (Рис 4.1б). Величина центростремительной составляющей будет равна
 (4.4)
(4.4)
Величина вращательного ускорения
 (4.5)
(4.5)
Построение планов скоростей и ускорений рассмотрим на примере центрального кривошипноползунного механизма (КПМ), схема которого в заданном положении и в соответствующем масштабе показана на Рис 4.2а.
Кривошип ОА вращается с угловой скоростью  .Скорость точки А определяется как
.Скорость точки А определяется как

и направлена перпендикулярно кривошипу ОА в сторону задаваемую направлением вращения.
Для построения плана скоростей из произвольной точки  (полюса плана скоростей) в масштабе
(полюса плана скоростей) в масштабе  проводим вектор
проводим вектор  (Рис 4.2б).
(Рис 4.2б).
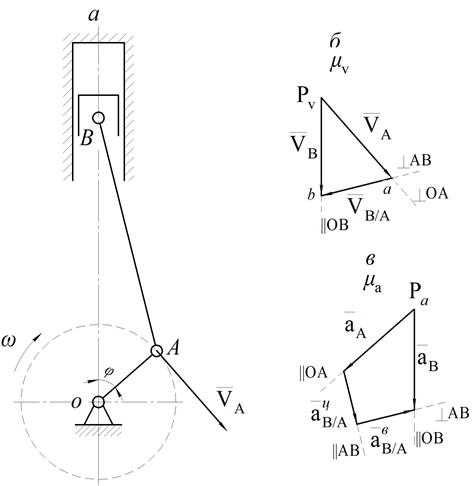
Рис. 4.2
Скорость точки В, принадлежащей как и точка А, шатуну АВ определяется по формуле (4.1), где относительная скорость точки В будет перпендикулярна прямой АВ. Поэтому из конца вектора ( точки а) проводим линию перпендикулярную шатуну АВ. С другой стороны, абсолютная скорость точки В должна быть направлена по вертикали ОА. Из полюса проводим линию параллельную линии ОА и в точке пересечения этих линий находим точку в, являющуюся концом вектора абсолютной скорости точки В ( ) в выбранном масштабе плана скоростей. Вектор ав на плане скоростей соответствует относительной скорости точки В по отношению к точке А (
) в выбранном масштабе плана скоростей. Вектор ав на плане скоростей соответствует относительной скорости точки В по отношению к точке А ( ). Из плана скоростей находим
). Из плана скоростей находим
и
 .
.
Угловая скорость вращения шатуна АВ определиться как:
 .
.
Для построения плана ускорений определим ускорения точки А (конца кривошипа ОА, который вращается с постоянной угловой скоростью.
Это ускорение направлено из точки А к точке О. Выбирая произвольную точку  в качестве полюса плана ускорений (Рис 4.2в), переносим вектор
в качестве полюса плана ускорений (Рис 4.2в), переносим вектор  в точку полюса, в соответствующем масштабе
в точку полюса, в соответствующем масштабе  . Ускорение точки В конца шатуна, как следует из выражения (4.3), определится как векторная сумма ускорения точки А относительного центростремительного и вращательного ускорений точки В по отношению к точке А.
. Ускорение точки В конца шатуна, как следует из выражения (4.3), определится как векторная сумма ускорения точки А относительного центростремительного и вращательного ускорений точки В по отношению к точке А.

Направление центростремительного ускорения точки В будет параллельна прямой АВ, а величина
Строим на плане ускорений в соответствующем масштабе  ускорение
ускорение  из конца вектора . Вращательная составляющая ускорения точки В не известна по величине и направлена перпендикулярно АВ поэтому из конца вектора на плане ускорений проводим линию перпендикулярную АВ.
из конца вектора . Вращательная составляющая ускорения точки В не известна по величине и направлена перпендикулярно АВ поэтому из конца вектора на плане ускорений проводим линию перпендикулярную АВ.
Абсолютное ускорение точки В очевидно будет направлено по линии ОВ. Тогда, проводя из точки  линию параллельную ОВ, на пересечении этих двух прямых получаем точку в, соответствующую концу вектора
линию параллельную ОВ, на пересечении этих двух прямых получаем точку в, соответствующую концу вектора  на плане ускорений. Величину ускорения точки В получаем из плана ускорений с учетом масштаба
на плане ускорений. Величину ускорения точки В получаем из плана ускорений с учетом масштаба
 .
.
Найдя аналогично величину вращательного ускорения можно определить угловое ускорение звена АВ
 .
.
Графический и графоаналитический методы исследования наглядны и универсальны, так как позволяют определять скорости и ускорения звеньев механизмов любой структуры, но не обладают достаточной точностью и трудоемки.








