 2015-02-27
2015-02-27 1536
1536Динамические модели можно подразделить на два больших класса: традиционные модели и современные модели или ещё их называют модели в пространстве состояний.
К традиционным моделям относят простейшие инерционные модели, модели на базе передаточных функций и комплексных коэффициентов передачи.
Многие технологические процессы обладают инерционностью. Говорят, что такие процессы имеют «память». Инерционные модели бывают дискретные и непрерывные, линейные и нелинейные.
Если модель линейная дискретная, то её представляют в виде суммы свертки (весовая функция):
 (4.4)
(4.4)
где  - дискретные значения выходного сигнала;
- дискретные значения выходного сигнала;  - дискретная весовая функция;
- дискретная весовая функция;  - дискретные значения входного сигнала;
- дискретные значения входного сигнала;  - случайная помеха.
- случайная помеха.
В этой модели по существу нет параметров, она непараметрическая. Роль величин, которые необходимо определить из экспериментальных данных, играют значения ординат импульсной характеристики, которые рассматривают как коэффициенты регрессивной модели, а роль факторов здесь играют значения одной и той же входной величины, но в разные моменты времени.
Если линейная модель непрерывная, то модель будет типа интеграла свертки:
 (4.5)
(4.5)
Модель (4.5) также как и (4.4) является непараметрической. Она содержит неизвестную весовую функцию g(τ). На практике широко используется возможность представления весовой функции для стационарной системы в форме Релея-Ритца путем разложения функции в ряд по системе известных ортогональных функций:
где  - заданная система базисных функций (фильтров), зависящая от параметра α.
- заданная система базисных функций (фильтров), зависящая от параметра α.
Такой прием делает модель параметрической. Теперь она содержит ограниченное множество параметров ai, подлежащих определению.
Нелинейные инерционные модели могут быть представлены в виде сумм или рядов Вольтерра.
В импульсном варианте модель можно представить:
 (4.6)
(4.6)
Для непрерывного объекта:
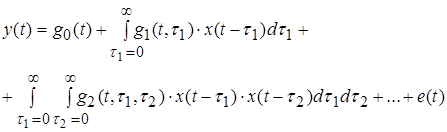 (4.7)
(4.7)
В выражениях (4.6) и (4.7) g1 и g2 соответственно весовые функции, их называют ядрами Вольтерра первого и второго порядка; g0 - составляющая не связанная с входным сигналом.
Непосредственное определение ядер по опытным данным представляет собой сложную задачу. Поэтому их обычно аппроксимируют путем разложения в ряд по системе известных ортогональных функций:

Теперь задача построения модели сводится к определению параметров весовой функции по косвенным экспериментальным данным.








