2015-02-04
2015-02-04 666
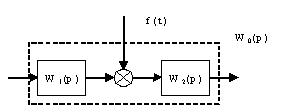
6661. Последовательное соединение микроЭВМ с непрерывными динамическими звеньями.
В форме преобразований Лапласа:
 , обозначим
, обозначим  ,
,  ,
,
применим z-преобразование, имея в виду, что
 .
.
 ,
,
отсюда  .
.
 Если система состоит из двух микроЭВМ, соединенных последовательно с непрерывными динамическими звеньями:
Если система состоит из двух микроЭВМ, соединенных последовательно с непрерывными динамическими звеньями:
,
то  ,
,
 .
.
После z-преобразования
 ,
,
отсюда  .
.
2. Система управления с отрицательной обратной связью.
Базовая структурная схема цифровой САУ
САУ описывается следующей системой уравнений:
тогда
 ,
,
 ,
,
 ,
,
 - дискретная передаточная функция системы по сигналу рассогласования;
- дискретная передаточная функция системы по сигналу рассогласования;
 - в форме z -изображений.
- в форме z -изображений.
Так как  ,
,
то  ,
,
 - дискретная передаточная функция системы по каналу управления;
- дискретная передаточная функция системы по каналу управления;
 - в форме
- в форме  -преобразований.
-преобразований.
Определим дискретную передаточную функцию системы по каналу возмущения, воздействующего на объект:



|
|
Здесь  ;
;
 ;
;
тогда 

 , отсюда
, отсюда
 .
.
Параметры входного воздействия входят в полученное выражение неявно, поэтому в явном виде найти дискретную передаточную функцию по каналу возмущения невозможно.