 2015-03-08
2015-03-08 555
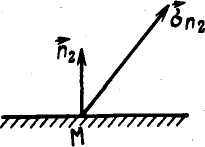
555Сила, действующая на бесконечно малый элемент поверхности dS, равна  dS, где — вектор силы, рассчитанный на единицу площади элемента и приложенный в любой его точке, называется вектором напряжения или просто напряжением (см. рис. 1).
dS, где — вектор силы, рассчитанный на единицу площади элемента и приложенный в любой его точке, называется вектором напряжения или просто напряжением (см. рис. 1).
Напряжение зависит от положения элемента dS, т. е. от ориентировки его
в теле. Если требуется указать, что напряжение  относится к площадке с нормалью п, то пишут
относится к площадке с нормалью п, то пишут  .
.
Проекции этого вектора на оси произвольной системы координат Ох1х2х3 обозначаются через σnj (j= 1, 2, 3). В частности, проекции напряжений xi, отнесенные к площадкам, перпендикулярным к координатным осям Oxi, обозначаются через σij (i,j = 1,2,3), где σii называются нормальными напряжениями,
а σij = σji (i≠j) — касательными напряжениями, действующими на этих площадках (рис. 5). Легко доказать следующие очень важные соотношения:
σnj =  (i, j = 1,2,3), (1.29)
(i, j = 1,2,3), (1.29)
которые позволяют найти компоненты вектора напряжения для произвольной площадки с нормалью  , проходящей через точку М; αi = cos(n, хi) (i = 1, 2, 3).
, проходящей через точку М; αi = cos(n, хi) (i = 1, 2, 3).
Поэтому говорят, что совокупность шести величин σ ij, называемых компонентами симметричного тензора напряжений, полностью характеризует напряженное состояние в точке тела М.
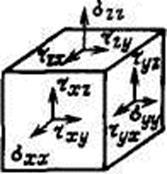
| Рис. 5. Расположение компонент тензора напряжений относительно выбранной декартовой системы координат |
| Рис. 6. Векторы напряжений в точке М, действующие в двух произвольно ориентированных площадках |
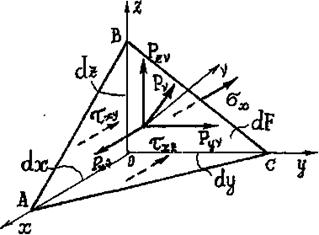
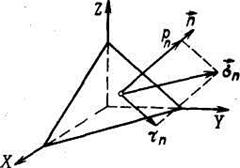
Рис. 7. Нормальная и касательная проекции вектора напряжения 
Пусть заданы две площадки, проходящие через одну и ту же точку М (рис. 6). Используя формулу (1.29), нетрудно доказать, что проекция напряжения  , действующего на первую площадку, на нормаль
, действующего на первую площадку, на нормаль  ко второй равна проекции напряжения
ко второй равна проекции напряжения  , действующего на вторую площадку, на нормаль
, действующего на вторую площадку, на нормаль  к первой и вычисляется по формуле
к первой и вычисляется по формуле
 (1.30)
(1.30)
где α1i и α2j — направляющие косинусы нормалей и .
Эта формула позволяет вычислить проекцию на любое направление вектора напряжения, действующего на данную площадку. В частности, проектируя вектор на направление нормали, получаем нормальное напряжение (рис. 7)
 (1.31)
(1.31)
Касательное напряжение на этой же площадке равно
 (1.32)
(1.32)
где σn — величина вектора напряжения .
Из формулы (1.30) следуют формулы перехода от одной системы Ох1х2х3 координат к другой О 

 ;
;
 (1.33)
(1.33)
где σ'кr — компоненты тензора напряжений относительно новой системы координат;
αкi = cos ( ), αrj = cos (
), αrj = cos ( ).
).
Например, зависимость между напряжениями в декартовой (Ох1х2х3) и цилиндрической (r, θ, z) системах координат с общей осью Ox3 = Oz имеет вид
σrr = σ11cos2θ + σ22 sin2θ + σ12 sin 2θ;
σθθ= σ11 sin2θ + σ22 cos2θ - σ12 sin 2θ;
σzz = σ33; (1.34)
σrθ =  (σ22 - σ11)sin 2θ + σ12 cos2θ;
(σ22 - σ11)sin 2θ + σ12 cos2θ;
σrz = σ13 cosθ + σ23sin θ;
σθz= - σ13 sinθ + σ23 cosθ;
где σrr —радиальное напряжение, действующее на площадке, перпендикулярной к радиусу; σθθ — тангенциальное (окружное) напряжение, действующее на площадке, нормаль которой перпендикулярна к радиусу.
Принимая во внимание известные соотношения аналитической геометрии
из формул (1.33) после суммирования левой и правой частей по к (при r = к) получается важное соотношение
 (1.35)
(1.35)
Оно показывает, что величина σ, называемая средним нормальным напряжением, инвариантна по отношению к преобразованию системы координат.
Характерной особенностью напряженного состояния сплошной среды является наличие в каждой точке тела, по крайней мере, трех взаимно перпендикулярных площадок, на которых касательные напряжения σij (i≠j) равны нулю. Направления нормалей к этим площадкам образуют главные направления, которые не зависят от исходной системы координат. Соответствующие напряжения σii=σi называются главными нормальными напряжениями. Поэтому любое напряженное состояние в рассматриваемой точке может быть вызвано растяжением (сжатием) окрестности точки в трех взаимно перпендикулярных направлениях.
Главные нормальные напряжения могут быть найдены из следующего кубического уравнения:

корни этого уравнения могут быть только вещественными.
Так как решения этого уравнения хi = σi (i=1,2, 3) не зависят от выбора системы координат, коэффициенты σ, А, В также не должны зависеть, т. е. они инвариантны. Это еще одно доказательство инвариантности среднего напряжения
 (1.36)
(1.36)
Два других инварианта физического смысла не имеют.
 |
 (1.37)
(1.37)
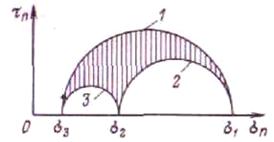
Рис. 8. Диаграмма Мора:
/, 2, 3 — окружности, координаты которых определяют нормальные и касательные напряжения на площадках, проходящих через главные оси 1, 2, 3 соответственно
Если главные направления совпадают с координатными осями (Охi), то формулы (1.31) — (1.34) упрощаются. Например, формулы (1.31) и (1.32) принимают вид
 (1.38)
(1.38)
где αi = cos (n, xi).
Отсюда нетрудно получить, что напряжения рп и τn могут лежать только внутри области, заштрихованной на рис.8. Это так называемая диаграмма Мора, дающая наглядное представление о напряжениях в различных сечениях, проходящих через данную точку. Здесь принята нумерация главных осей такой, чтобы выполнялись условия
σ1 ≥ σ2 ≥ σ3 (1.39)
Практический интерес представляют сечения, проходящие через главные оси. На рис. 8 точкам какой-либо окружности 1, 2 или 3 отвечают площадки, содержащие соответствующую главную ось.
Если площадка содержит главную ось Ox1 и наклонена под углом θ к оси Ох2, то из формул (1.38) получается

Эти напряжения соответствуют координатам точек окружности № 1 (см. рис. 8).
По аналогии можно записать формулы для напряжений, действующих на площадках, проходящих через две другие главные оси, иначе, для координат точек окружностей № 2 и 3 на рис. 8.
При θ = π/4, т. е. в сечениях, делящих пополам углы между главными плоскостями, касательные напряжения принимают экстремальные значения











