 2015-04-17
2015-04-17 769
769Другим важным эффектом обратной связи в системах управления является уменьшение влияния на них внешних возмущающих сигналов. Для иллюстрации этого рассмотрим систему управления числа оборотов двигателя, используемого для вращения шпинделя станка при обработке закреплённой на нём детали. Структурная схема системы показана на рис. 19.2.
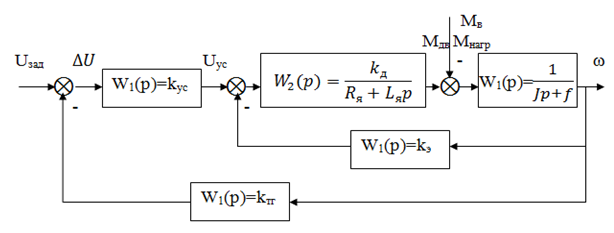
Рис. 19.2. Структурная схема АСР числа оборотов двигателя
Здесь Rя и Lя - соответственно сопротивление и индуктивность якорной цепи двигателя;
Кус, Кд и Ктг - соответственно коэффициенты передачи усилителя, двигателя, тахогенератора;
I - приведённый момент инерции двигателя;
f - коэффициент, характеризующий сопротивление резанию;
Uзад, ΔU, Uус - соответственно задающее напряжение, рассогласование и напряжение на выходе усилителя;
МдВ, МВ и Мнагр - соответственно момент, развиваемый двигателем, момент возмущения, обусловленного изменением усиления резания из-за неравномерности поверхности обрабатываемой детали и из-за износа резца, и момент нагрузки вращающегося инерционного тела; Мнагр=Мдв-Мв;
W - скорость вращения двигателя.
На рис. 19.3 показаны зависимости скорости ω от момента нагрузки на валу Мнагр для типового двигателя.
ω ωос
Мнагр Мнагр
0 0
Рис.19.3 Моментная характеристика Рис.19.4 Зависимость ω от Мнагр
типового двигателя для АСР
Для двигателя без обратной связи (часть структурной схемы, обведенная пунктиром) при Lя≈0 изменение скорости за счёт изменения момента возмущения можно найти по выражению
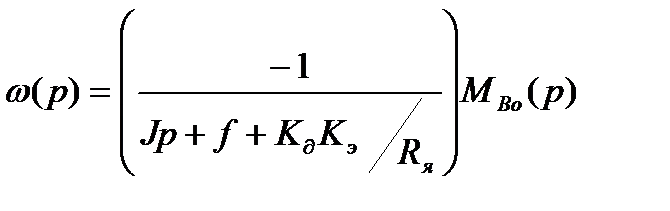 . (19.13)
. (19.13)
В случае ступенчатого возмущающего воздействия величиной МВ0 получим МВ(р) = МВо/p.
Отклонение скорости двигателя от её требуемого значения в установившемся режиме при действии возмущения может быть найдено с помощью предельной теоремы Лапласа
 . (19.14)
. (19.14)
Рассмотрим, что произойдёт в системе с обратной связью при действии того же возмущения. Пользуясь формулой Мэзона, запишем:
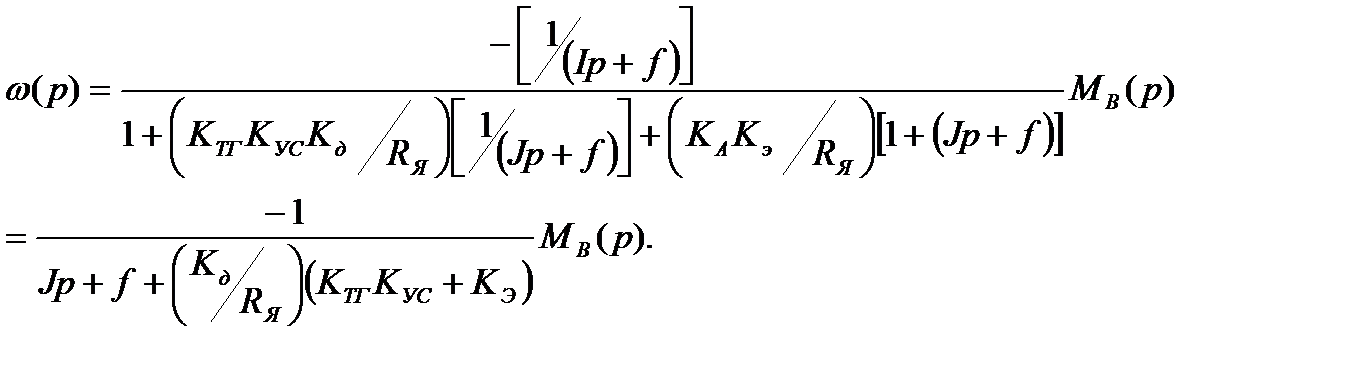 (19.15)
(19.15)
Отклонение скорости двигателя от требуемого значения (ошибку регулирования в установившемся состоянии) вновь найдём, воспользовавшись предельной теоремой Лапласа:
 . (19.16)
. (19.16)
При большей величине коэффициента усиления усилителя, выполняющего функции пропорционального регулятора, имеем:
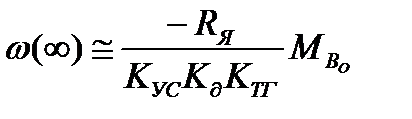 (19.17)
(19.17)
Для оценки степени влияния обратной связи сравним отклонение скорости двигателя при действии возмущения МВ (t) в рассмотренных двух случаях. Отношение изменения скорости для системы с обратной связью ωос к изменению скорости двигателя ω будет
 (19.18)
(19.18)
Кривые переходных процессов для двигателя и для АСР показаны на рис. 19.5.
Напомним, что «0» на графике соответствует номинальному (требуемому) значению ω, при котором ∆ω=0.
ω
без о.с.
ω(∞)
о.с. ωос(∞)
0 t
Рис. 19.5. Переходный процесс для двигателя и АСР
Одним из источников ошибок регулирования в системах является шум, генерируемый в электронных элементах систем, в транзисторах. Наиболее «шумящим» источником, как правило, является измерительное устройство. Это возмущение или шум может быть представлено так, как показано на рис.19. 6.
W (p)
g(p) y(p)∙
-Wпр(p) Wчэ(p)
fш(p)
Рис.19.6. Граф АСР
Здесь W (p) – передаточная функция прямого тракта;
Wчэ (p) – передаточная функция чувствительного элемента;
Wпр (p) – передаточная функция преобразователя.
Влияние шума на выходной сигнал y (р) можно описать следующим образом:
 (19.19)
(19.19)
При  для рабочих частот системы.
для рабочих частот системы.
Из выражения (19.19) следует, что чем больше Wчэ(p), тем меньше влияние шума на выходной сигнал y(p). Отсюда следует, что при проектировании следует добиваться максимума величины Wчэ(p). Это эквивалентно максимизации отношения сигнал/шум чувствительного элемента. Поскольку, как уже было сказано, функция чувствительности  , необходимо, чтобы чувствительный элемент был тщательно спроектирован и обладал минимумом шумов, дрейфов и изменений параметров.
, необходимо, чтобы чувствительный элемент был тщательно спроектирован и обладал минимумом шумов, дрейфов и изменений параметров.
Выполнение этих требований обычно сложная, но решаемая задача, так как элементы обратной связи работают на сравнительно низких по мощности уровнях и могут быть спроектированы с небольшими затратами.
Достаточно часто шум присутствует и во входном сигнале систем g(t), получаемом с помощью задающего устройства. В этом случае входной сигнал может быть представлен как сумма g(t)+r(t) где r(t) - шум. Система в этом случае будет передавать как шум, так и полезный сигнал. Однако, если частотный спектр шума и входного сигнала g(t) различны (обычно спектр шума более высокочастотен), отношение на выходе сигнал/шум может быть максимизировано выбором такой передаточной функции системы, которая имела бы низкие частоты пропускания.
Интересно заметить, что в человеческом организме различные рецепторы служат датчиками ощущений. Фраза «все болезни от нервов» находит конкретное обоснование в проведенном выше анализе, из которого следует, насколько важна роль и состояние чувствительных элементов в системах, в том числе человеческого организма, таких как система терморегуляции, стабилизации кровяного давления, пульса, стабилизации освещенности сетчатки глаза и т.п.








