 2015-04-17
2015-04-17 537
537Основным принципом, лежащим в основе построения системы автоматического регулирования, является принцип обратной связи. В этом случае информация об ошибке регулирования используется для формирования с помощью регулятора управляющего воздействия на объект регулирования. Регулятор реализует закон (алгоритм) регулирования, т.е. реализует определенную последовательность операций по преобразованию сигнала ошибки (X) в выгодной сигнал регулятора (V).
Математически модель регулятора может быть представлена в виде дифференциального уравнения, либо в виде соответствующей передаточной функции.
В том случае, когда для получения сигнала Y используются сведения лишь о величине ошибки X в каждый момент времени, закон регулирования имеет вид
V(t)=кх(t) (20.1)
и носит название пропорционального закона регулирования или сокращенно П-закона.
Как следует из выражения (20.1), чем больше величина ошибки, тем больше управляющее воздействие будет оказано на объект регулирования.
Так как X(t) =g(t) - Y(t), то при У(t)<g(t), т.е. при уменьшении регулируемой величины относительно ее заданного, значения g(t) будем иметь пропорциональное увеличение сигнала V(t) и наоборот: при увеличении регулируемой величины будем иметь пропорциональное уменьшение сигнала V(t).Такая организация управления связана с обратной связью, называемой " отрицательной обратной связью” (о.с.).
Если провести аналогию с оператором, функции, которого в АСР выполняет автоматическое управляющее устройство, то можно сказать, что регулятор реализует логический процесс (процесс мышления), решая насколько и в какую сторону следует изменить положение регулирующего органа.
Однако, если продолжить рассмотрение по аналогии, можно заметить, что человек - оператор, принимая решение по управлению, пользуется не только сиюминутной информацией. Он использует также накопленный в процессе управления опыт: сведения о последствиях принятия тех или иных решений по управлению процессом, сведения о динамических свойствах объекта (например, его инерционности) позволяющие предвидеть возможные изменения параметров процесса и т.д.
На рис. 20.1,а показаны два графика изменения ошибки регулирования. В момент времени t1 имеем Х=0. Если в данный момент оператору необходимо было бы принимать решение по управлению на основе только величины ошибки, то очевидно, в момент времени t1 никаких действий им не было бы предпринято. Однако опытный оператор изменит положение регулирующего органа, понимая, что в силу инерционности объекта в следующий момент времени ошибка обязательно появится. Причем для процесса 2 эта ошибка будет больше, чем для процесса I.
Какая же, конкретно информация позволит ему сделать подобные заключения? Сведения о скорости изменения ошибки dx/dt в момент t1. Так как для процесса 2 она больше, чем для процесса I, то опытный оператор не дожидаясь, когда ошибка появится, осуществит заранее изменение состояния регулирующего органа, предваряя таким образом появление ошибки. Причем, для процесса 2 величина управляющего воздействия будет выбрана им больше, чем для процесса I.
x а x б
2
x0
0 t 0 t
t1 t1
Рис. 20.1. Переходные процессы в АСР
Формализуя сделанные рассуждения, можно записать, что в этом случае управление осуществляется по следующему закону:
V(t)=K2  , (20.2)
, (20.2)
который называется дифференциальным законом регулирования или сокращенно Д-законом. Передаточная функция соответствующего Д-регулятора будет
W(p)=K2p, (20.3)
а его частотная передаточная функция запишется в виде:
 . (20.4)
. (20.4)
Из выражения (20.4) следует, что фазочастотная характеристика  положительна и равна p/2, что объясняет эффект "предварения", вносимый Д-законом регулирования.
положительна и равна p/2, что объясняет эффект "предварения", вносимый Д-законом регулирования.
Рассмотрим далее рис. 20.1,б. Наблюдаем с позиций опытного оператора за процессами по записям на самописце. Предпринимая определенные шаги по управлению процессом до момента времени t1, были получены в разное время разные графики 1 и 2. (На рисунке они совмещены). Какие выводы будут сделаны опытным оператором на основании этих кривых? Несмотря на приблизительно одинаковый разброс ошибки x(t) относительно среднего значения (для графика 1 - x =0, для графика 2 - x=x0), в целом, кривая 2 расположена выше требуемого значения регулируемой величины. "На глаз" это отличие выражается в отличие площадей сверху и снизу от линии х=0. Учитывая это, оператор решает скорректировать свои последующие действия и в момент t1 осуществляет дополнительное изменение положения регулирующего органа для случая 2, чтобы в среднем иметь x =0.
Формализуем наши рассуждения. Поскольку решение принималось на основе площади, под кривой X(t), математически это может быть записано в виде интеграла
 (20.5)
(20.5)
Выражение соответствует так называемому интегральному закону регулирования или сокращенно И–закону. Передаточная функция И - регулятора имеет вид:
 , (20.6)
, (20.6)
а его частотная передаточная функция будет при этом равна
 . (20.7)
. (20.7)
Как следует из выражения (20.7), фазочастотная характеристика  .
.
Отрицательный фазовый угол характеризует задержку во времени принятия решений, связанную с необходимостью накоплений сведений о процессе.
В зависимости от сложности решения задач по управлению рассмотренные законы регулирования могут быть применимы как порознь, так и совместно, в различных комбинациях. При этом соответствующие регуляторы, используемые в промышленности, будут иметь соответствующие названия: ПИ, ПД, ПИД. Математическая модель, например, для ПИД регулятора будет иметь вид:
 . (20.8)
. (20.8)
Рассмотрим опытного оператора и новичка. Очевидно, в общем случае процессы управления будут осуществляться ими по-разному. Если новичок будет больше реагировать на сиюминутную ситуацию и придавать таким образом большой вес информации об ошибке x(t), то опытный оператор будет более полно использовать сведения о скорости изменения ошибки и учтет вместе с тем последствия своих ранее принятых решений по управлению. Иначе говоря, они придают различное значение различной информации. Условно это обстоятельство можно выразить в коэффициентах закона регулирования (20.8).
Так, для опытного оператора  а для новичка
а для новичка  Очевидно, что указанное различие скажется в ведении процесса, в различии характера изменения регулируемой величины.
Очевидно, что указанное различие скажется в ведении процесса, в различии характера изменения регулируемой величины.
Приведенные рассуждения позволяют сделать понятными следующие выводы:
- вид закона регулирования и его коэффициенты определяют качество переходных процессов в системах автоматического регулирования;
- задача проектирования АСР в простейшем случае является задачей выбора закона регулирования и его коэффициентов, или, иначе, регулятора и его настроек.
Наряду с принципом обратной связи в АСР используется также принцип компенсации возмущений.
Для реализации этого принципа необходимо получать информацию о характере действующих на объект управления возмущений. Тогда, имея эту информацию, можно организовывать «встречное» управляющее воздействие на объект, тем самым компенсируя возможные последствия действия возмущения. Блок-схема системы при реализации данного принципа управления показана на рис.20.2.
| Измерительное устройство |
| Объект |
| Регулирую-щий орган |
| Исполнитель-ный механизм |
| Регулятор |
Рис.20.2. Блок-схема АСР, реализующая принцип компенсации возмущений
Отметим, что принцип управления определяет собой структуру АСР. Так, при использовании принципа обратной связи имеем дело с замкнутой системой, а при использовании принципа управления по возмущению - с разомкнутой системой управления, так как информация об изменении регулируемой величины в этом случае не используется для управления.
Рассмотрим в качестве примера бак, в котором требуется поддерживать определенный уровень воды h. Если за основное возмущение принять расход воды из бака Gвых, то, измерив его с помощью датчика расхода, можно, используя регулятор, сформировать задающее воздействие для системы управления положением регулирующего клапана на питающем трубопроводе, как это показано на рис.20.3. Задача, решаемая такой АСР, будет заключаться в увеличении (уменьшении) расхода воды в баке G вх настолько, насколько увеличивается (уменьшается) расход воды из бака. При этом уровень воды в баке будет (теоретически) оставаться постоянным.
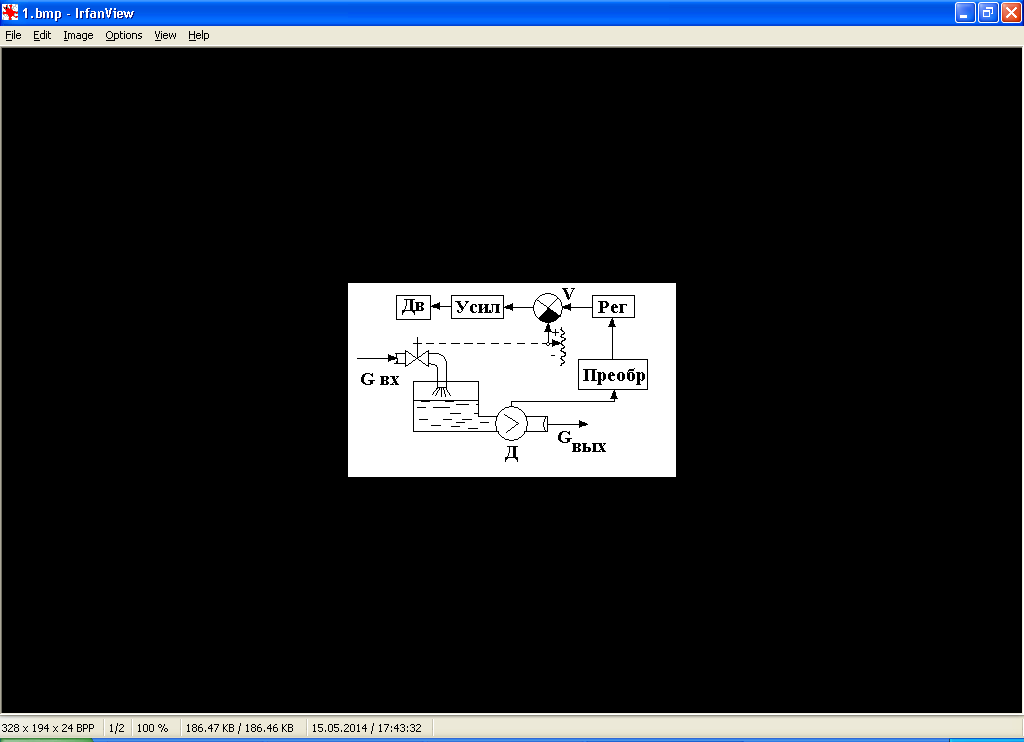
| КД |
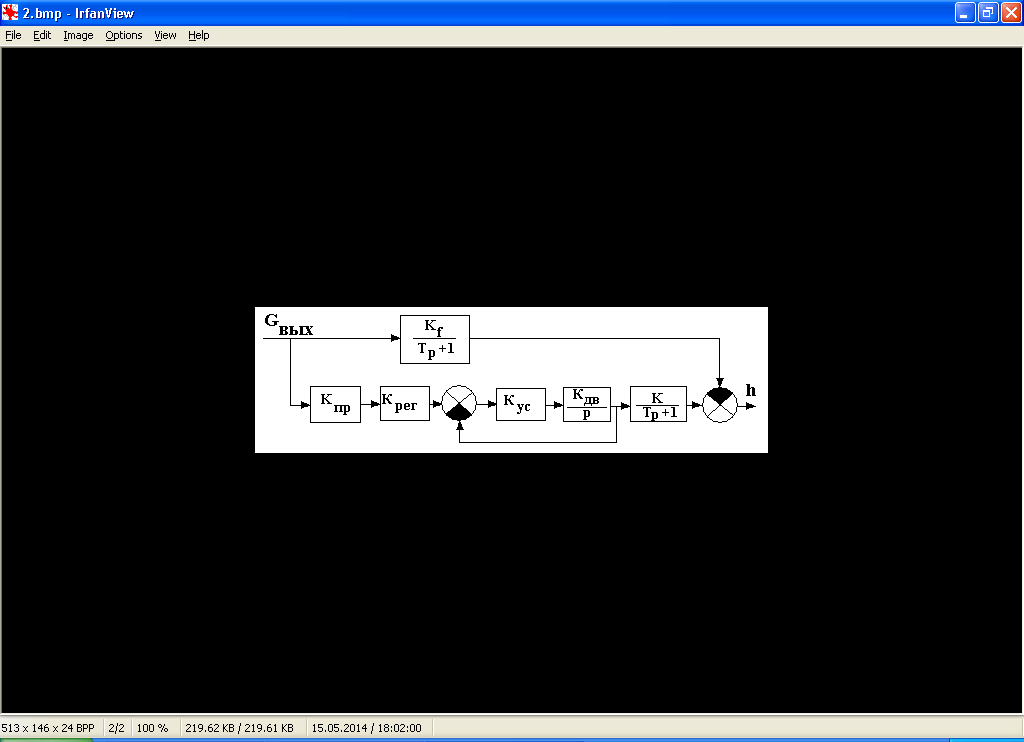
Рис.20.3. Реализация принципа управления по возмущению
На рис. 20.3 приняты следующие обозначения:
Д - датчик расхода с коэффициентом передачи Кд;
Преобр - преобразователь с коэффициентом передачи  ;
;
Рег - регулятор с коэффициентом передачи  ;
;
Усил - усилитель с коэффициентом передачи  ;
;
Дв - двигатель с передаточной функцией  .
.
Передаточная функция бака по каналу возмущающего воздействия  , а по каналу управляющего воздействия
, а по каналу управляющего воздействия  .
.
Пунктирной линией показаны механические связи.
Для вспомогательной системы регулирования положения заслонки  . (20.9)
. (20.9)
При  << Т можно принять
<< Т можно принять  . В этом случае передаточная функция системы будет иметь вид:
. В этом случае передаточная функция системы будет иметь вид:
 . (20.10)
. (20.10)
Для  необходимо, чтобы согласно уравнению(20.10)
необходимо, чтобы согласно уравнению(20.10)  , т.е. выполнялось условие:
, т.е. выполнялось условие:
 . (20.11)
. (20.11)
Отсюда следует, что коэффициент передачи регулятора должен быть равен:
 . (20.12)
. (20.12)
Таким образом, регулятор, обеспечивающий компенсацию влияния возмущения, реализует П-закон регулирования
 , (20.13)
, (20.13)
где m- сигнал с преобразователя  .
.
Если инерционностью вспомогательной системы регулирования положения заслонки пренебречь нельзя, то для улучшения качества работы всей системы следует воспользоваться информацией о скорости изменения расхода, например ПД-законом регулирования:
 . (20.14)
. (20.14)
Одним из основных преимуществ использования принципа компенсации возмущений является повышение быстродействия АСР в ее реакции на возмущающее воздействие. Здесь одновременно с изменением возмущающего воздействия происходит изменение управляющего сигнала на объект регулирования, что позволяет не дожидаться, пока (как в системах управления с обратной связью) это возмущение повлияет на регулируемую величину. Недостатком рассматриваемого принципа является то, что на практике равенство(20.11) можно реализовать лишь с определенной погрешностью. Это приводит к постоянному накоплению ошибок регулирования в процессе работы АСР.
Указанного недостатка лишены системы так называемого комбинированного управления, в которых реализованы одновременно оба рассмотренных принципа. При проектировании АСР стремятся уменьшить влияние измеряемых возмущений, реализуя принцип компенсации возмущений, оставляя на долю обратной связи устранение ошибок, возникающих как от измеряемых возмущений, так и из-за невозможности полной компенсации влияния измеряемых возмущений.
Так, например, в рассмотренном примере стабилизации уровня воды в баке, неучтенным возмущением является изменение давление воды в питающем трубопроводе. Действие данного возмущения приведет к появлению ошибки регулирования, которая в комбинированной системе будет устранена за счет обратной связи.
Для повышения точности работы систем может быть использована информация о задающем воздействии  и о регулируемой величине y(t).
и о регулируемой величине y(t).
Существуют, наряду с линейными, нелинейные, а также адаптивные законы регулирования [2]. В данном пособии ограничимся лишь линейными законами.
Блок-схема комбинированной АСР показана на рис.20.4.
| Измерительное устройство |
g ⊗
| Объект |
| Регулятор |
-
Рис.20.4. Блок-схема комбинированной АСР








