 2015-04-01
2015-04-01 5108
5108Параметры движения – это перемещение, скорость и ускорение. Они связаны между собой дифференциальными зависимостями. Поэтому, если какой-либо один из этих параметров является естественной входной величиной для данного ИП, то другие два можно измерить с использованием дифференцирующих и интегрирующих преобразователей.
Само движение может быть поступательным и колебательным (вибрация).
Приборы для измерения скорости называются велосиметрами (от лат. velocitas и англ. velocity – скорость), для измерения ускорения – акселерометрами (от лат. acceleratio, англ. acceleration и франц. accélération – ускорение), для измерения виброперемещений – виброметрами.
Параметром движения жидких и газообразных тел является расход вещества, проходящего через трубопровод данного сечения. Расход может быть объёмным (м3/ч) и массовым (кг/ч). С расходом связан его интеграл – объём или масса вещества, прошедшего за данное время.
Диапазон измеряемых скоростей огромен, он перекрывает 10 и более порядков величин: примерно от 10 -7 м/с (например, скорость оседания шахтной кровли) до 104 м/с (космические скорости); для вращательного движения – от долей оборота в секунду до 5000 об./с.
Диапазон измеряемых ускорений также очень велик: примерно от 10-5 до 104 м/с2.
Амплитуда измеряемых вибромеремещений бывает от долей микрометра до сотен миллиметров, виброускорений – от 10-1g до 103g (в виброметрии ускорения принято выражать в количестве значений ускорения свободного падения g ≈ 9,81 м/с2).
Диапазон измерения объёмного расхода бывает примерно от 10-3 до 104 м3/ч.
Есть две группы ИП для измерения параметров движения:
· ИП, основанные на непосредственном контакте движущегося объекта с неподвижной базой (не обязательно механическом контакте, он может быть оптическим, акустическим и др.). У этих ИП естественной входной величиной является перемещение.
· Инерциальные ИП. У них естественной входной величиной является ускорение.
Для измерения медленных перемещений при поступательном движении применяются те же методы, что и для измерения линейных размеров. Перемещения колёсного транспорта (пройденный путь) обычно определяют методом суммирования дискретных значений этого перемещения, равных длине окружности колеса. За каждый оборот колеса (или за его дробную долю) получают импульс, например, с помощью индукционного преобразователя. Импульсы суммирует счётчик. Так же проводят измерения на конвейерах, прокатных лентах и т.п.
При движении по воде применяют вертушки (лаги). Естественной входной величиной для них является объёмный расход воды, прошедшей через сечение преобразователя. Он пропорционален скорости движения, а интеграл расхода, т. е. объём прошедшей воды – пройденному пути. Для летящих тел, например, ракет, применяют инерциальные приборы и для получения пройденного пути дважды интегрируют выходной сигнал ИП, пропорциональный ускорению.
Для измерения скоростей на земле применяют индукционные ИП – их выходной сигнал пропорционален скорости. Сам их принцип таков, что они дифференцируют перемещение. Для измерения скорости ракет применяют инерциальные приборы с интегрированием их выходного сигнала.
Для измерения параметров вибраций применяют индукционные и пьезоэлектрические ИП вместе с дифференцирующими и интегрирующими преобразователями.
3.10.5. Методы измерения температуры.
Диапазон измеряемых температур распространяется от долей градуса до десятков тысяч градусов термодинамической температурной шкалы. {3К26}
Для измерения температуры до 1100 0С используется температурная зависимость электрического сопротивления металлов, до 2500 0С – температурная зависимость ЭДС термопар. При измерении температуры в узком диапазоне используется температурная зависимость электрического сопротивления полупроводников. Все названные варианты соответствуют контактным методам измерения температуры: ИП находится в соприкосновении с объектом, температура которого измеряется.
Существуют и бесконтактные методы – измерение температуры по тепловому излучению. Соответствующие приборы получили название пирометров. (Пирометр – от греч. pyr – огонь). Название традиционное, но не очень удачное, потому что оно распространяется не только на приборы измеряющие высокие температуры расплавленных металлов и сплавов, но и низкие, меньше 100 0С, по инфракрасному излучению, когда никакого огня нет. Пирометры здесь не рассматриваются. Подробные сведения о них можно найти в [1] и [4].
ВОПРОСЫ:
1. Какие измерительные преобразователи используются для измерения линейных размеров?
2. Какие измерительные преобразователи используются для измерения механических напряжений?
3. Какие измерительные преобразователи используются для измерения механических усилий?
4. Какие параметры движения Вам известны? Назовите примерные значения диапазонов измерения параметров движения.
5. Какие измерительные преобразователи используются для измерения параметров движения?
6. Какие методы измерения температуры Вам известны?
ЛИТЕРАТУРА к главе 3.
ОСНОВНАЯ
1. Туричин А.М. Электрические измерения неэлектрических величин. – 4-е изд. – М.-Л.: изд-во «Энергия», 1966. – 690 с.: ил.
2. Нуберт Г.П. Измерительные преобразователи неэлектрических величин (перевод с англ.). – Л.: изд-во «Энергия», 1970. – 360 с.: ил.
3. Электрические измерения неэлектрических величин / Под ред. П.В. Новицкого. -5-е изд. - Л.: Энергия, 1975. - 576с
4. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Измерительные преобразователи. - Л.: Энергоатомиздат, 1983. - 320с.
5. Основы метрологии и электрические измерения: Учебник для вузов/Б.Я. Авдеев, Е.М. Антонюк, Е.М. Душин и др.: Под ред. Е.М. Душина. – 6-е изд., – Л.: Энергоатомиздат. Ленингр. отд-ие, 1987. – 480 с.: ил.
6. Измерение электрических и неэлектрических величин.Учебное пособие для вузов/ Н.Н.Евтихиев, Я.А.Купершмидт, В.Ф.Папуловский и др. Под общ.ред.Н.Н. Евтихиева.- М.Энергоатомиздат.1990-352с.ил
7. Методы и средства измерений:учебник для вузов/Г.Г.Раннев, А.П.Тарасенко.-3-е изд.,стер.-М.: Изд.центр «Академия», 2006.-336с.
8.Методы исследования свойств материалов при интенсивных динамических нагрузках: Монография/ Под общ. ред. д-ра физ.-мат. Наук М.В.Жерноклетова.- 2-е изд.,доп.и испр.- Саров:ФГУП «РФЯЦ-ВНИИЭФ».2005.-428 с.-ил.
Дополнительная литература
1.Экспериментальная механика. В 2-х книгах: Кн. 1,2. Пер. С англ. / Под. ред. А. Кобаяси. - М.: Мир. 1990.-Кн.1-616с.; Кн.2-552с.
2. Клокова Н.П. Тензорезисторы: теория, методика расчета, разработки.- М.: Машиностроение.1990.-224с.
3. Проектирование датчиков для измерения механических величин / Под ред. Е.П.Осадчего. - М.: Машиностроение, 1979.-480с.
4. Логинов В.Н. Электрические измерения механических величин. - 2-е изд. - М.: Энергия, 1976. - 104с.
5. Преображенский В.Г. Теплотехнические измерения и приборы. - 3-е изд. - М.: Энергия, 1978. - 704с.
6. Тензометрия в машиностроении. Справочное пособие / Под ред. Макарова Р.А. - М.: Машиностроение, 1976. - 216с.
7. Немец И. Практическое применение тензорезисторов. Пер. с чешск., М.: Энергия, 1970. - 144с.
КОММЕНТАРИИ к главе 3
{ 3К1}
В таблице 3.1 указаны входные величины, непосредственно воздействующие на измерительные преобразователи (их иногда называют «естественными»); измеряемая величина может быть другой. Например, тензорезисторный ИП может быть применён для измерения давления жидкости или газа, которое в датчике {1К6} преобразуется в изменение размера базы (см. раздел 3.3) тензорезисторного ИП.
Название «параметрические» связано с тем, что выходными сигналами этих ИП являются параметры электрических цепей, точнее, изменения значений этих параметров под воздействием входных величин ИП. Для извлечения измерительной информации эти ИП принципиально требуют дополнительного источника энергии. Например, терморезисторный ИП может быть включён в мостовую измерительную цепь, к одной из диагоналей которой подключён источник напряжения.
{3К2}
Тензоэффект (от лат. tensum – натяжение)
Пуассон (Poisson) Симеон Дени (1781-1840) – французский математик и физик, почётный член Петербургской АН (1826).
Хвольсон Орест Даниилович (1852-1934) – русский физик.
Гук (Хук, Hooke) Роберт (1635-1703) – английский учёный, экспериментатор, архитектор.
Деформация (растяжение, сжатие, изгиб, кручение) называется упругой, если она исчезает после снятия нагрузки, и пластической, если она полностью не исчезает (остаточная деформация).
Юнг (Янг, Young) Томас (1773-1829) – английский физик.
Сильфон – тонкостенная металлическая цилиндрическая оболочка с поперечной гофрированной боковой поверхностью; расширяется или сжимается вдоль оси подобно пружине под действием разности давления внутри и снаружи.
Бурдон (Bourdon, 1808-1884) – французский инженер, по имени которого названы манометры, чувствительный элемент которых представляет собой упругую металлическую трубку, закрытую с одного конца и согнутую дугой. Под давлением жидкости трубка стремится увеличить свой объём и при этом несколько распрямляется.
{3К3}
Тензорезисторные ИП из фольги.
а) б) в)
Рис.1.
Решётка наклеивается на плёнку, а плёнка – на объект, претерпевающий деформацию. На рис. 1,а показан ИП, предназначенный для измерения линейных деформаций. Растягивающее или сжимающее усилие приложено вдоль петель решётки. Длина петель называется базой датчика l, её изменение Δl под действием приложенного усилия – деформацией, а εl = Δl/l - относительной деформацией. Расширения на концах решётки сделаны для припаивания выводов, а расширения в петлях – для уменьшения чувствительности к поперечным деформациям. На рис. 1,б показан ИП, наклеиваемый на мембрану для измерения давления, а на рис. 1,б – ИП, наклеиваемый на вал для измерения крутящего момента.
Другой способ изготовления тензорезисторных ИП – вакуумная возгонка металла или полупроводника и его конденсация на подложку. Такие ИП называют плёночными.
{3К4}
В простейшем случае это консольная балка. С одной стороны приклеены тензорезисторы, испытывающие деформацию растяжения (R1 и R3), а с другой – сжатия (R2 и R4).
 У консольной балки один конец закреплён, а к другому приложена изгибающая её сила F.
У консольной балки один конец закреплён, а к другому приложена изгибающая её сила F.
{3К5}
Рис. 1. Тензодатчик, применяемый в весах, рассчитанных на номинальную нагрузку 5; 10; 15; 20; 30; 50; 75; 100 кгс. РКП = 2 мВ/В.
Рис. 2. Тензодатчик, применяемый в весах, рассчитанных на номинальную нагрузку 1; 1,5; 2 тс. РКП = 2 мВ/В.
Примечание. В технической документации по весоизмерительной технике часто используются внесистемные единицы измерения силы: «килограмм-сила» и «тонна-сила»; 1 кгс = 9,80665 Н.
{3К6}
Примером может служить модель AD7730 фирмы Analog Devices (рис. 1). Мост подключается к микросхеме шестью проводами:
· двумя проводами на мост подаётся напряжение питания от того же источника + 5 В, который служит напряжением питания для аналоговой части микросхемы и подаётся на вывод AVDD; эти провода названы «силовыми» (+ FORCE и – FORCE);
· двумя проводами напряжение с диагонали питания моста подаётся на микросхему и оно в ней используется, как опорное для АЦП (выводы + VREF и – VREF); эти провода названы «чувствительными», «воспринимающими» (+ SENSE и – SENSE);
· двумя проводами напряжение с выходной диагонали моста подаётся на вход микросхемы (выводы +AIN и – AIN) и внутри микросхемы поступает на усилитель с программируемым коэффициентом усиления и далее на АЦП.
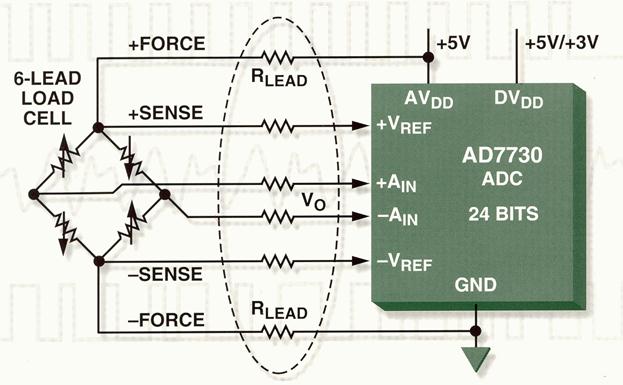
Рис. 1. Подключение моста с тензореситорными ИП к микросхеме AD7730
Примечания:
1. Число, код которого образуется на выходе любого АЦП пропорционально отношению входного напряжения к опорному. То, что в схеме рис. 1 одно и то же напряжение является и напряжением питания моста и опорным напряжением АЦП, обеспечивает независимостькоэффициента преобразования деформации тензорезисторов в код от этого напряжения.
2. Почему две вершины моста соединены с микросхемой не одним, а двумя проводами (FORCE и SENSE), или, другими словами, почему вывод AVDD не соединён перемычкой с выводом + VREF, а вывод GND («земля») не соединён с – VREF? Получилось бы не шесть проводов, а четыре.
Дело в том, что в схеме рис. 1 по «силовым» проводам идёт сравнительно большой ток (поэтому они так и названы). Если, например, сопротивления тензорезисторов R = 200 Ом, то при напряжении 5 В этот ток будет 25 мА. Он создаёт падение напряжения на сопротивлениях этих проводов, которые обозначены RLEAD. В схеме рис. 1 оно не играет роли. А ток в проводах SENSE ничтожен, потому что он определяется большим входным для опорного напряжения сопротивлением АЦП. Если же перейти к четырёхпроводной схеме, то по проводам SENSE пойдёт большой ток и тогда напряжение питания моста и опорное напряжение АЦП перестанут быть одинаковыми.
{3К7}
Подстроечный резистор, изготовленный из фольги, показан на рис. 1.
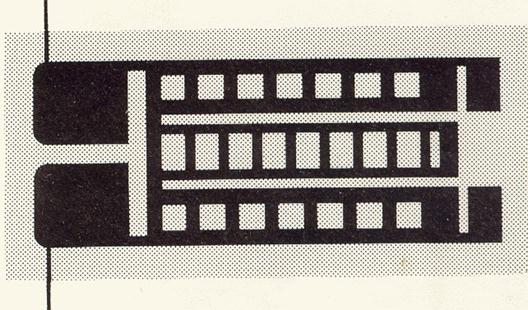
Рис. 1. Наклеиваемый подстроечный резистор из фольги.
Изменение сопротивления достигается разрушением отдельных перемычек.
На рис. 2 показан неравновесный мост, в котором R1 ÷ R4 – рабочие тензорезисторы, а R5 ÷ R12 – подстроечные. Резисторы R5 и R6 служат для установки нулевого значения выходного напряжения моста U при отсутствии нагрузки и при некоторой исходной температуре θ1, а R7 и R8 – для повторного выполнения этой операции при другой температуре θ2 в пределах рабочего температурного диапазона (желательно поближе к верхнему пределу). Резисторы R9 и R10 служат для установки номинального значения U при номинальной нагрузке и температуре θ1, а R11 и R12 – для повторного выполнения этой операции при температуре θ2.



Рис. 2. Неравновесный мост с рабочими тензорезисторами R1 ÷ R4 и подстроечными резисторами R5 ÷ R12.
{3К8}
Гост 28836 – 90. Датчики силоизмерительные тензорезисторные. Общие технические требования и методы испытаний.
Стандарт устанавливает следующие значения РКП при номинальной нагрузке: 0,5; 1,0; 1,5; 2,0; 2,5; 3,0 мВ/В.
Метрологические характеристики определены следующими категориями точности: 0,02; 0,03; 0,04; 0,05; 0,06; 0,10; 0,15; 0,20; 0,25; 0,30; 0,40; 0,50; 0,60; 1,00; 2,00. Эти числа определяют пределы допускаемых значений составляющих погрешности в процентах от номинального значения «рабочего коэффициента передачи» (РКП), а именно: систематической составляющей погрешности, нелинейности и гистерезиса (первые две со знаком ±), а половинные значения этих чисел - среднеквадратическое отклонение случайной составляющей и изменение РКП при изменении температуры на 10 0С.
{3К9}
Обратим внимание, что функция преобразования R(θ) линейна, но не проходит через начало координат. Поэтому, если, например, нам известно, что при θ = θ1 = 50 оС сопротивление R = R1 = 121,4 Ом, а мы хотим найти R = R2 при θ = θ2 = 100 оС, то эту задачу нельзя решать, составив простую пропорцию θ1 / θ2 = R1 / R2. Правильное решение состоит в том, что надо составить систему двух уравнений
R1 = R0(1 + αθ1);
R2 = R0(1 + αθ2),
из которой следует, что
 Ом.
Ом.
{3К10}
ГОСТ Р 50 353-92. Термопреобразователи сопротивления. Общие технические условия.
Стандарт распространяется на медные, платиновые и никелевые ИП. Они обозначены соответственно ТСМ; ТСП и ТСН. Нормируется номинальная статическая функция преобразования (в стандарте названа номинальной статической характеристикой). Её обозначение содержит число, выражающее значение R0 в Омах и букву, например: 50М (международное обозначение Сu50) – это ТСМ с R0 = 50 Ом; 100П (Pt100) – это ТСП с R0 = 100 Ом. У ТСМ R0 = 10; 50; 100 Ом, у ТСП R0 = 1; 10; 50; 100; 500 Ом. Номинальная функция преобразования нормируется в виде
R = WθR0,
где Wθ = R/R0 – отношение значения R приданной температуре θ кзначению R0 при θ = 0.
Значения Wθ задаются таблично через каждый градус во всём диапазоне и аналитически в виде интерполяционных уравнений.
Стандарт устанавливает три класса допусков (А; В и С) на отклонения R0 и W100 (значение Wθ при θ = 100 0С) от своих номинальных значений, а также на допускаемые отклонения действительных значений температуры от определяемых по номинальной функции преобразования. Например, для ТСП класса А (высший) допускаемое отклонение R0 составляет ± 0,005 %, наименьшее значение W100 = 1,3845 (номинальное значение 1,3850; наибольшее значение не нормируется), допускаемые отклонения действительных значений температуры от определяемых по номинальной функции преобразования Δ = ± (0,15 + 0,002| θ |) 0C. Аналогичные значении для ТСМ класса С (низший) равны ± 0,2 %; 1,4240 (номинальное значение 1,426); ± (0,5 + 0,0065| θ |) 0C.
Стандарт регламентирует ток, который можно пропускать через термопреобразователь: он должен быть ограничен сверху так, чтобы вызываемое им увеличение R0 не превышало 1 % от его номинального значения. Значение тока должно выбираться из ряда: 0,1; 0,2; 0,5; 1,0; 2,0; 3,0; 5,0;10,0;15,0; 20,0; 50,0 мА.
{3К11}
Название происходит от слов «термочувствительный резистор», что, конечно, мало оправдано, потому что металлические резисторы тоже чувствительны к температуре.
{3К12}
В качестве примеров на рис. 1 – 4 показаны некоторые из них.
На рис. 1 показан датчик, применяемый в приборах для измерения температуры помещений. Катушка с медной проволокой намотанной на каркас, находится в тонкостенной металлической трубке, а она заключена в полированный перфорированный экран для защиты от механических повреждений и лучистой теплоты.
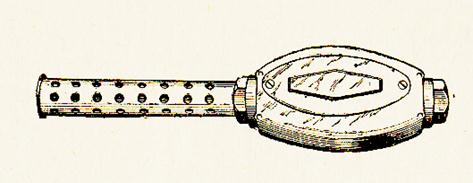
Рис.1. Внешний вид датчика с медным терморезистором
На рис. 2 показаны датчики с платиновыми ИП.
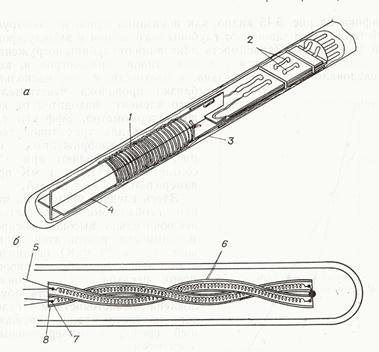
Рис. 2. Датчики с платиновыми ИП: с бифилярной намоткой на слюдяной крестовине (а); со спиралью в кварцевых трубочках (б).
1 – платиновая проволока; 2 – крепление проводов; 3 – стеклянный кожух; 4 – слюдяной каркас-изолятор; 5 – четыре платиновых вывода; 6 – кварцевая трубка; 7 – сварное присоединение платиновых выводов; 8 – крепление платины к стеклу.
Полупроводниковый ИП, показанный на рис. 3, герметизирован, благодаря чему его можно применять в условиях любой влажности.
Миниатюрные полупроводниковые ИП (рис. 4) применяют для измерения температуры малых объектов и для измерения изменяющихся во времени температур (малая масса – малая тепловая инерционность). Терморезистор выполнен в виде шарика диаметром около 0,8 мм с выводами из тонкой платиновой проволоки, к концам которой приварены проводники из нихрома. Корпус сделан из стекла.
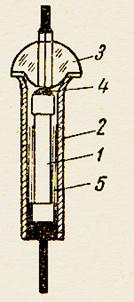
Рис. 3. Полупроводниковый ИП. 1 – полупроводниковый стержень; 2 – металлический корпус; 3 и 4 – стекло и олово для герметизации; 5 – металлическая фольга, в которую обёрнут стержень.
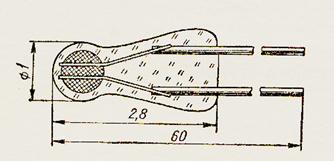
Рис. 4. Миниатюрный полупроводниковый
ИП бусинкового типа.
{3К13}
Пример.
Пусть I = 20 мА; R0 = 100 Ом; θ = 0 ÷ 100 оС.
Зададим Е = 10 В. Тогда R + R0 = 10 / 0,02 = 500 Ом; R = 400 Ом; А = 4; αθ = 0,428; δ = 0,428 / (1 + 0, 428 + 4) ≈ 0,08 = 8%.
Это очень большая нелинейность. Для того, чтобы погрешность линейности была на том же уровне, что и погрешность от нагрева терморезистора током нужно снизить δ примерно в 100 раз. Но тогда нужно примерно во столько же раз увеличить Е, т.е. взять Е = 1 кВ, что не реально.
{3К14}
Микросхемы серии AD77хх, применение одной из которых в тензометрии было показано в {3К6}, могут применяться и для термометрии, как показано на рис.1. Здесь применён один внешний по отношению к микросхеме источник тока 400 мкА, к которому подключены последовательно включённые платиновый терморезистор Pt RTD (Resistance Temperature Detector) с R0 = 100 Ом и опорный резистор RREF = 6,25 кОм. Падение напряжения на опорном резисторе используется в качестве опорного напряжения (VREF = 400 мкА × 6,25 кОм = 2,5 В) для микросхемы, а падение напряжения на терморезисторе является входным, которое внутри микросхемы через мультиплексор MUX и усилитель PGA с программируемым коэффициентом усиления поступает на аналого-цифровой преобразователь ADC. Выходной последовательный код, несущий информацию об измеряемой температуре поступает на другую микросхему - микроконтроллер.
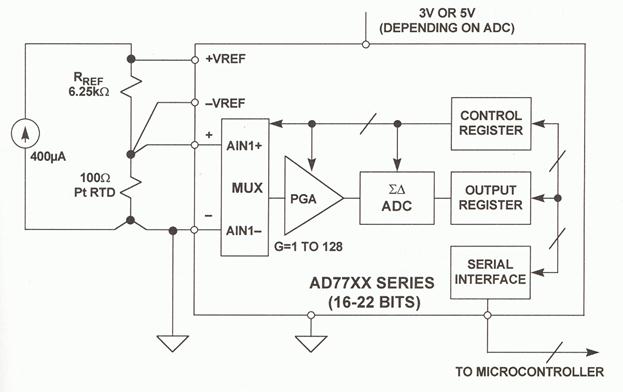
Рис.1. Применение микросхем серии AD77хх фирмы Analog Devices для измерения температуры посредством терморезисторов.
Следует отметить, что фирма Analog Devices создала также микросхемы с ещё более высоким уровнем интеграции: у них микроконтроллер входит в состав микросхемы. Для получения отсчёта к ним достаточно подключить цифровой индикатор. Фирма назвала их аналого-цифровыми микро преобразователями и обозначила ADuC (буква μ – микро заменена на u).
{3К15}
На рис. 1 показан такой мост. Терморезистор R1 соединён с прибором трёхпроводной линией связи. Резисторы R2 ÷ R5 вместе c R1 образуют мост, питаемый синусоидальным напряжением сетевой частоты. Мост уравновешен при
(R1 + R2,т)R4 = R3R5. (1)
где R2,т – текущее значение сопротивления переменного резистора R2, зависящее от положения движка.
Рис. 1. Мост с автоматическим уравновешиванием для измерения и регистрации температуры. Пунктир – механические связи.
Состояние равновесия автоматически поддерживается следящей системой, содержащей усилитель переменного напряжения, реверсивный асинхронный двигатель Д и понижающий редуктор Р. Эта система перемещает движок переменного резистора R2 так, чтобы выполнялось равенство (1): если температура θ, например, увеличивается, то R1 увеличивается, а R2,т на столько же уменьшается. Вместе с перемещением движка резистора R2 перемещается указатель вдоль шкалы, проградуированной в оС и перо, вычерчивающее кривую изменений температуры во времени на бумажной диаграммной ленте равномерно перематываемой с верхнего подающего рулона на нижний принимающий (привод перемещения ленты на рисунке не показан).
При изменении температуры нужное направление вращения двигателя в сторону выполнения (1), а не наоборот в сторону отхода от него, получается благодаря тому, что фаза напряжения, поступающего на вход усилителя, изменяется на 180о при увеличении и уменьшении R1 относительно значения, соответствующего (1).
Трёхпроводная линия связи терморезистора R1 при определённых условиях обеспечивает инвариантность показаний к изменениям сопротивлений проводов, вызванным изменением длины проводов или температуры помещения, в котором они находятся. Обозначим сопротивления проводов, идущих к R1 на рис. 1, r1, r2, r3 в порядке слева направо и запишем условие равновесия моста с учётом этих сопротивлений:
(R1 + r1 + R2,т) R4 = (R3 + r2)R5. (2)
При r1 = r2 и R4 = R5 (2) превращается в (1), т.е. r1 и r2 не влияют. Третий провод включён в диагональ питания моста и, следовательно, его сопротивление r3 принципиально не влияет на равновесие моста.
{3К16}
Некоторые конструкции индуктивных измерительных преобразователей показаны на рис. 1.
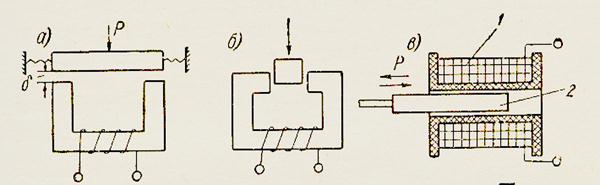
Рис. 1. Варианты конструкций индуктивных преобразователей.
В конструкции рис. 1,а подвижная часть магнитопровода подвешена на пружинах и перемещается под воздействием измеряемой величины Р – сосредоточенной силы, давления, линейного перемещения. В конструкции рис. 1,б при перемещении подвижной части магнитопровода изменяется площадь поперечного сечения воздушного зазора. В конструкции рис. 1,в с разомкнутой магнитной цепью принцип действия основан на изменении индуктивности катушки 1 при большем или меньшем внедрении в неё ферромагнитного сердечника 2 под воздействием измеряемой величины Р. Этот вариант применяется при сравнительно больших перемещениях сердечника.
Рис. 2. Дифференциальная конструкция индуктивного преобразователя.
Особый интерес представляет дифференциальная конструкция, пример которой показан на рис. 2. Здесь две катушки, каждая из которых создаёт магнитный поток: катушка 1 – поток Ф1, катушка 2 – поток Ф2. Потоки направлены так, что, замыкаясь через подвижную часть магнитопровода, подвешенную на пружинах, они в ней вычитаются. При исходном симметричном положении подвижной части и одинаковых токах в катушках Ф1 – Ф2 = 0. При перемещении вверх на Δδ индуктивность L1 катушки 1 уменьшается, а индуктивность L2 катушки 2 увеличивается, при перемещении вниз – наоборот.
Зависимости модулей комплексных сопротивлений Z1 и Z2 катушек 1 и 2 дифференциального индуктивного преобразователя и разности этих сопротивлений (Z1 – Z2) от воздушных зазоров между подвижной и неподвижными частями магнитопровода приведены на рис. 3, где δ0 – воздушные зазоры при симметричном положении подвижной части; Δδ – отклонения в ту и другую стороны от этого положения; Δδ = (0,3 ÷ 0,4) δ0 – рабочая область значений Δδ.
Рис. 3.
Дифференциальная конструкция обеспечивает ряд существенных преимуществ:
1. Позволяет сделать тонкой, а следовательно и лёгкой подвижную часть магнитопровода. Поперечное сечение магнитопровода делают таким, чтобы не было насыщения ферромагнетика, а разность (Ф1 – Ф2) при малых Δδ существенно меньше Ф1 и Ф2.
2. Подвижная часть магнитопровода притягивается к неподвижной (электромагнит), что в данном случае является вредным эффектом, но в дифференциальной конструкции сила притяжения к верхней и нижней неподвижным частям магнитопровода компенсируются.
3. Катушки 1 и 2 обычно включают в мостовые измерительные цепи (см. раздел 3.5.2.), реагирующие на разность их сопротивлений Z1 и Z2. Как видно на рис. 3, зависимость этой разности от Δδ более линейна, чем Z1(δ) и Z2(δ).
4. В мостовых измерительных цепях с дифференциальными индуктивными преобразователями компенсируется влияние температуры и других внешних факторов на Z1 и Z2.
{3К17}
Один из вариантов схемы фазочувствительного выпрямителя (ФЧВ) показан на рис. 1.
Рис. 1. Схема фазочувствительного выпрямителя.
Синусоидальное напряжение питания моста Uп служит для ФЧВ управляющим: оно открывает диоды во время своих положительных полуволн и закрывает их во время отрицательных. При этом оно не создаёт тока в выходном магнитоэлектрическом приборе {2К4}, т.к. токи в правой паре резисторов R одинаковы и направлены встречно. Напротив, выходное напряжение U создаёт полуволны тока в приборе, когда диоды открыты. Магнитоэлектрический прибор даёт показание, пропорциональное среднему значению этих полуволн за период. В двух случаях – когда Δδ > 0 и когда Δδ < 0 –эти полуволны либо синфазны, либо противофазны с положительными полуволнами управляющего напряжения, т.е. они либо положительны, либо отри-
цательны (рис. 2).
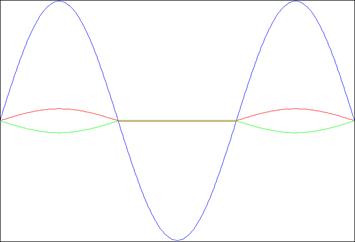
Рис. 2.
На рис. 2. синим цветом показано напряжение Uп; красным и зелёным – токи в магнитоэлектрическом приборе при Δδ > 0 и Δδ < 0. Соответственно, средний ток через прибор в этих двух случаях имеет разное направление. Присоединение ФЧВ к схеме моста рис.3.7 обеспечивает характеристику, показанную на рис. 3. Нулевая отметка (она соответствует Δδ = 0) находится в середине шкалы прибора.
Рис. 3. Зависимость среднего значения тока в выходном магнитоэлектрическом приборе от перемещения подвижной части дифференциального индуктивного преобразователя в схеме, содержащей мост (рис. 3.7), выходное напряжение которого подано на фазочувствительный выпрямитель.
{3К18}
На рис. 1,а показана конструкция дифференциального емкостного преобразователя, в которой под воздействием измеряемой величины изменяется l. Подвижная пластина плоского конденсатора висит на пружинах между двух неподвижных и под воздействием измеряемой величины меняет своё положение на Δ l относительно исходного симметричного положения.
Рис. 1. Конструкция (а) и эквивалентная схема (б) дифференциального емкостного преобразователя с изменением расстояния между пластинами (оранжевый цвет – корпус из изоляционного материала).
Эквивалентная схема такого преобразователя (рис. 1,б) представляет собой последовательное соединение двух конденсаторов. Если ёмкость одного из них – ёмкость между подвижной пластиной и верхней неподвижной – увеличивается на ΔС, то при этом ёмкость другого – ёмкость между подвижной пластиной и нижней неподвижной – на столько же уменьшается. Если измерительная цепь, в которую включён такой преобразователь, вырабатывает сигнал, пропорциональный не ΔС, а ΔZ, то, как ясно из (3.16) в разделе 3.6.1, этот сигнал будет прямо пропорционален Δl.
На рис. 2 показан преобразователь с изменением площади S между пластинами, предназначенный для измерения угла поворота вала. Подвижная пластина 1, скреплённая с валом 3, поворачивается относительно неподвижной пластины 2. При этом изменяется площадь S между пластинами, а расстояние между ними остаётся неизменным. Изменение площади ΔS пропорционально изменению угла поворота вала относительно некоторого начального положения. Из (3.15) следует, что в данном случае целесообразно применить такую измерительную цепь, которая вырабатывает сигнал, пропорциональный не ΔZ, а ΔС.
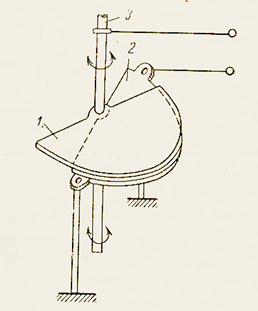
Рис. 2. Конструкция емкостного преобразователя с изменением площади между пластинами.
На рис. 3 показан преобразователь, предназначенный для измерения уровня жидкости h. Он представляет собой цилиндрический конденсатор (рис. 3,а и 3,б), состоящий из центрального стержня 1 и трубы 2. При изменении h изменяется объём диэлектрика, которым служит жидкость. Эквивалентная схема конденсатора показана на рис. 3,в. У конденсатора С1 диэлектриком служит жидкость, уровень которой измеряется, а конденсатор С2 – воздушный. Ёмкость конденсаторов С1 и С2 определяется выражениями:
 ;
;  ,
,
где ε – относительная диэлектрическая проницаемость жидкости (в формуле для С2, относительная диэлектрическая проницаемость воздуха принята равное единице). Общая ёмкость
 ,
,
где а = const; b = const для данного ε, т.е. для данной жидкости. Как видим, зависимость С(h) линейна.
Рис. 3. Емкостной преобразователь с изменением объёма диэлектрика: разрез (а); вид сверху (б); эквивалентная схема (в). Оранжевый цвет – изолятор; голубой – жидкость.
{3К19}
На рис. 1 показан мост с дифференциальным ёмкостным преобразователем С1 - С2. Резисторы R1 и R2 служат для уравновешивания моста при исходном значении измеряемой величины, воздействующей на С1 - С2 (уравновесить мост переменного тока одной регулировкой нельзя!). Пунктиром показаны экраны трёх кабелей 1, 2 и 3. Распределённые ёмкости этих кабелей, т.е. ёмкости между экранами-оплётками и соответствующими центральными жилами условно показаны в виде сосредоточенных емкостей Ск,1 , Ск,2, Ск,3. В выходную диагональ моста включён усилитель, назначение которого не только и не столько усиливать сигнал, сколько обеспечивать высокое входное сопротивление нагрузки моста. Заметим, что Ск,1 , Ск,2, Ск,3 находятся не в плечах, а в диагоналях моста, следовательно, они не влияют на равновесие при исходном значении измеряемой величины, но Ск,3 шунтирует вход усилителя.
Рис. 1. Неравновесный мост с дифференциальным емкостным преобразователем.
{3К20}
Примеры реализации интегрирующего и дифференцирующего преобразователей на базе операционных усилителей приведены на рис. 1.
Рис. 1. Интегрирующий (а) и дифференцирующий (б) преобразователи.
{3К21}
На рис. 1 показана конструкция датчика пьезоэлектрического акселерометра. [Акселерометр (от латинского accelero – ускоряю) – прибор для измерения ускорения.]
Рис. 1. Конструкция пьезоэлектрического акселерометра.
Все элементы датчика крепятся к металлическому основанию 1, на котором нарезана резьба для крепления на объекте. Преобразователь 2 состоит из двух параллельно включённых пьезоэлементов из кварца. Инерционная масса 3 из сплава высокой плотности создаёт силу, воздействующую на преобразователь. Напряжение с кварцевых пластин снимается с помощью латунной фольги 4, соединённой с центральной жилой кабеля 5. Датчик закрыт крышкой 6, навинченной на основание.
В данном случае можно составить такое же уравнение движения, как и для индукционного преобразователя:
 ,
,
но теперь сам пьезопреобразователь – это пружина с большой жёсткостью W, поэтому
Wy >>  ,
,
и, значит,
где y – перемещение массы m относительно вибрирующего объекта; F – сила, создающая деформацию пьезопреобразователя; x – перемещение объекта относительно неподвижной базы.
Таким образом, в данном случае сила F, а значит и напряжение, снимаемое с датчика, пропорциональны ускорению вибрирующего объекта.
{3К22}
Томас Иоганн Зеебек (Seebeck; 1770 – 1831), профессор Берлинского университета.
{3К23}

