 2015-04-01
2015-04-01 1924
1924Предельные регуляторы. Регуляторы такого типа включаются в работу только при превышении двигателем номинального скоростного режима. Для этого пружина 3 регулятора (см. рис. 4.1) устанавливается с такой предварительной деформацией, которая обеспечивает преодоление поддерживающей силы грузов 2 на всех скоростных режимах до номинального включительно (точка А на рис. 4.3).
При достижении угловой скорости ω пред в точке С усилие пружины 3 (см. рис. 4.1) уравновешивается центробежными силами грузов 2, и при дальнейшем увеличении ω муфта 8 перемещается вверх, а рейка топливного насоса - в сторону выключения подачи топлива. Крутящий момент двигателя при этом уменьшается в соответствии с регуляторными характеристиками 5, 6 и т. д. (рис. 4.3, б). При угловой скорости вала, меньшей ω пред, двигатель работает при ручном управлении, т.е. практически без регулятора. При необходимости сменить частичную скоростную характеристику двигателя и, следовательно, скоростной режим необходимо воздействовать непосредственно на рейку топливного насоса, т. е. перемещать, например, точку 0 на рис. 4.1.
Прецизионные регуляторы прямого действия. Прецизионными называются такие однорежимные регуляторы, которые снабжены приспособлениями, позволяющими увеличивать точность поддержания заданного скоростного режима. Работа такого регулятора начинается при ω < ωном (точка D на рис. 4.3), при которой  . Дальнейшее увеличение ωр приводит к образованию регуляторной характеристики (штриховая линия на рис. 4.3, б) с малой степенью неравномерности, так как пружина 4 (рис. 4.4) имеет незначительную жесткость. При такой пружине регулятор с повышенной точностью (прецизионно) поддерживает заданный (номинальный) скоростной режим при всех нагрузках. Однако при уменьшении жесткости пружины регулятора снижается устойчивость его работы (уменьшается значение dE/dz в формуле (4.9) и, следовательно, значение Fр).
. Дальнейшее увеличение ωр приводит к образованию регуляторной характеристики (штриховая линия на рис. 4.3, б) с малой степенью неравномерности, так как пружина 4 (рис. 4.4) имеет незначительную жесткость. При такой пружине регулятор с повышенной точностью (прецизионно) поддерживает заданный (номинальный) скоростной режим при всех нагрузках. Однако при уменьшении жесткости пружины регулятора снижается устойчивость его работы (уменьшается значение dE/dz в формуле (4.9) и, следовательно, значение Fр).
Для обеспечения устойчивой.работы регулятора его конструкция дополняется упруго присоединенным катарактом 11с пружиной 9. При перемещении точки А влево поршень 10 отстает, пружина 9 растягивается, и ее усилие суммируется с усилием пружины 4, суммарная жесткость увеличивается, вследствие чего увеличиваются dE/dz и значение Fр, и регулятор работает устойчиво.
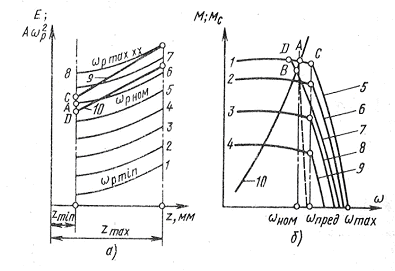
Рис. 4.3. Характеристика регулятора и двигателя на предельном и прецизионном регуляторах: а - регулятора (1 … 8 -  ; 9 – E = f(z); при предельном регуляторе; 10 - E = f(z) при прецизионном регуляторе); б – двигателя (1 – внешняя скоростная; 2…4 –частичные скоростные; 5…9 – регуляторные) 10 - потребителя
; 9 – E = f(z); при предельном регуляторе; 10 - E = f(z) при прецизионном регуляторе); б – двигателя (1 – внешняя скоростная; 2…4 –частичные скоростные; 5…9 – регуляторные) 10 - потребителя
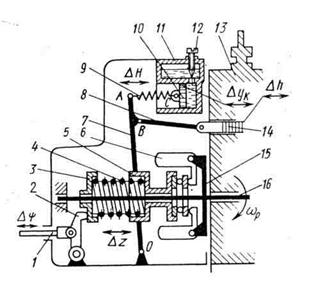 |
Рис. 4.4 Схема прецизионного регулятора: 1,8 – тяги; 2,7 – рычаги; 3 – тарелка; 4,9 – пружины; 5 – муфта; 6 – груз; 10 – поршень; 11 – катаракт; 12 – игла; 13 – топливный насос; 14 – рейка; 15 - траверса; 16 – кулачковый валик.
Всережимные регуляторы прямого действия. В автомобильных двигателях часто используются всережимные механические регуляторы прямого действия двух типов: с переменной предварительной деформацией пружин (рис. 4.5 ) и спостоянной предварительной деформацией пружин
Возможность изменять предварительную деформацию пружин в процессе работы создает всережимность регулирования. Так, предварительная деформация пружины, создающая усилие Ео1 дает статическую характеристику 8 восстанавливающей силы (рис. 4.6, а), предварительная деформация с усилием Е02 - характеристику 10 и т. д. Каждой из таких статических характеристик соответствует своя равновесная кривая и, следовательно, своя регуляторная характеристика 2, 3, 4 и др. на рис. 4.6, б. В частности, характеристика 2 на рис. 4.6, б соответствует характеристике 8 на рис. 4.6, а и т. д.
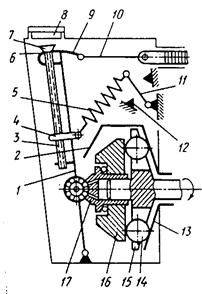
Рис. 4.5 Всережимный механический регулятор прямого действия:
1, 11 – рычаги; 2 – маслоподводящий щиток; 3 – винт регулировки степени неравномерности; 4 – хомутик; 5 – пружина; 6 – планка; 7 – чашка; 8 – пробка; 9, 10 – тяги к рейки топливного насоса; 12 – упор; 13 – коническая тарелка; 14 – груз; 15 – траверса; 16 – упорный диск; 17 - муфта
В схеме 4.5 усилие, развиваемое чувствительным элементом, через упорный диск 16. муфту 17 и рычаг 1 передается пружине 5, работающей на растяжение. Верхний конец рычага 1 тягами 9 и 10 соединен с рейкой топливного насоса.
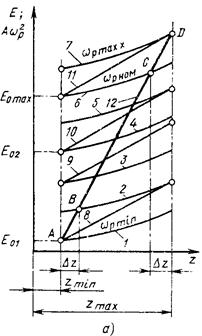
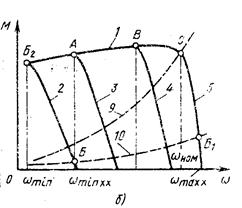
Рис. 4.6 Характеристики регулятора и двигателя при всережимном регулировании:
а) регулятора (1…7 -  ; 8…11 – E = f(z) регулятора с переменной предварительной деформацией пружин; 12 – E = f(z) регулятора с постоянной предварительной деформацией пружин); б) двигателя (1 – внешняя скоростная характеристика; 2…6 – регуляторные характеристики; 8 – регуляторная характеристика холостого хода; 9 – номинальная характеристика нагрузки; 10 –характеристика нагрузки холостого хода)
; 8…11 – E = f(z) регулятора с переменной предварительной деформацией пружин; 12 – E = f(z) регулятора с постоянной предварительной деформацией пружин); б) двигателя (1 – внешняя скоростная характеристика; 2…6 – регуляторные характеристики; 8 – регуляторная характеристика холостого хода; 9 – номинальная характеристика нагрузки; 10 –характеристика нагрузки холостого хода)
При повороте рычага управления 11 в крайне левое положение (до левого упора) установится минимальная предварительная деформация пружины 5 с усилием Ео1, уравновешивающимцентробежную силу грузов при ωmin; в связи с этим при увеличении ω пружина 5 растягивается (характеристика 8 на Рис. 4.6, а) и рейка перемещается в сторону уменьшения подачи топлива (регуляторная характеристика 2 на Рис. 4.6, б). При желании увеличить скоростной режим рычаг 11 (см. Рис. 4.5) поворачивают вправо. При крайне правом положении рычага 11 (правый упор) предварительная деформация пружины оказывается максимальной, рассчитанной так, что растяжение ее (характеристика 11 на Рис. 4.6, а) под действием центробежных сил начнется только при достижении номинального скоростного режима (точка С на Рис. 4.6, б).

