 2015-04-01
2015-04-01 2172
2172К двигателю внутреннего сгорания в современных условиях предъявляются все более повышенные требования по экономичности, приемистости, удобству настройки и обслуживания, составу отработавших газов в широком диапазоне скоростных и нагрузочных режимов.
Анализ конструктивных средств решения этих задач автоматическими регуляторами различных типов показал, что лучшими возможностями в этом отношении обладают электрические САР. Они могут содержать различные электронные блоки (микропроцессоры и мини -ЭВМ), осуществляющие непрерывный синтез информации о состоянии рабочего процесса и внешних условий и вырабатывающие для каждого мгновенного состояния двигателя наиболее целесообразное (а при наличии ЭВМ - и оптимальное) решение, определяющее вид команды на исполнительное устройство, задающее цикловую подачу топлива, а иногда и характер процесса впрыска. В такие САР естественным образом встраиваются электрические регуляторы, например, электрический регулятор частоты вращения прямого действия (рис. 5.4).
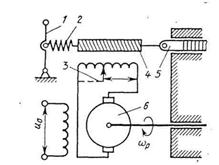
Рис.5.4 Схема электрического регулятора прямого действия: 1 - задатчик, 2 - пружина;
3 - ползунок; 4 - электромагнит; 5 - рейка; 6 - датчик частоты вращения
Составными элементами такого регулятора являются датчик 6 регулируемого параметра (например, тахогенератор постоянного тока) и исполнительное устройство в виде электромагнита 4. Возбуждение тахогенератора постоянного тока осуществляется либо постоянными магнитами, либо с помощью обмоток, получающих питание от источника постоянного тока. Входной координатой тахогенератора является изменение угловой скорости Δωр ротора, а выходной - изменение напряжений Δи на клеммах. В электрических машинах постоянного тока электродвижущая сила Еэ непосредственно связана с угловой скоростью ротора так, что Еэ = kEФωр где kE - постоянный коэффициент; Ф - поток возбуждения. При отсутствии нагрузки поток возбуждения остается постоянным, в связи, с чем электродвижущая сила практически пропорциональна угловой скорости, т. е.
Еэ = kωр (5.4)
где k = kEФuр; up - передаточное отношение механизма связи регулятора с коленчатым валом двигателя.
Для повышения точности работы тахогенератора необходимо обеспечить минимально возможную нагрузку на якорь. Тогда в соответствии с формулой (5.4) связь входной и выходной координат датчика можно принять линейной:
u = kωр (5.5)
Сигналы датчика 6 регулируемого параметра воспринимаются исполнительным устройством 4 через усилитель (например, трансформатор) или непосредственно.
В зависимости от напряжения и, поступающего на обмотки, электромагнит 4 вырабатывает силу Т эмпритяжения, значение которой определяется соотношением:
Тэм = kмI 2 (5.6)
Так как I = u/Rм, (где Rм – постоянное сопротивление) то в соответствии с выражением (5.5) поддерживающая сила регулятора пропорциональна  , т.е.:
, т.е.:
 (5.7)
(5.7)
где Аэм – коэффициент поддерживающей силы, зависящий от электрических свойств обмотки, ее сопротивления, потока возбуждения и т.д.
Сердечник электромагнита 4 непосредственно связан с пружиной 2, усилие которой Fnp = Е представляет собой восстанавливающую силу регулятора. Поэтому условие статического равновесия сердечника имеет вид
Е - Аэм ω2 = 0 (5.8)
т.е. является аналогичным формуле (4.6) определения статического равновесия для механического регулятора.
Применение на двигателях электрических регуляторов дает возможность отказаться от традиционного для дизелей управляющего воздействия через рейку топливного насоса высокого давления и перевести это воздействие непосредственно на топливную форсунку. В таких системах функции дозирования и фазирования реализуются форсунками, а на топливный насос возлагается задача поддержания в аккумуляторе необходимого давления топлива (аккумуляторная система впрыска).
а) б)
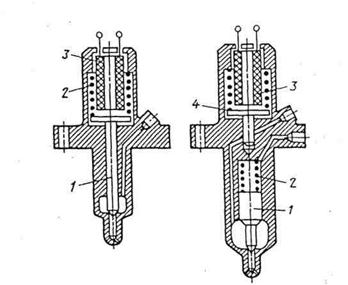
Рис. 5.5. Электромагнитные форсунки с воздействием:
а - на иглу; б - на клапан; 1 - игла; 2 - пружина; 3 - электромагнит; 4 - клапан
Форсунка с электрическим управлением (рис. 5.5) преобразует электрический импульс, сформированный регулятором, в гидравлический импульс впрыска топлива в цилиндры. На рис. 5.5, а показана конструктивная схема форсунки, игла 1 которой прижимается к седлу пружиной 2. Подъем иглы и впрыск топлива осуществляются электромагнитом 3, к работе которого предъявляются весьма высокие требования. Так, срабатывание и отпускание магнита должно укладываться в пределы от 0,1 до 1 мс при ходе иглы от 0,2 до 0,5 мм и запирающем усилии около 50Н. Электромагниты - устройства инерционные и сила тока нарастает и спадает в них по экспоненте.

