 2015-04-01
2015-04-01 3016
3016МЕХАНИЧЕСКИЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ЧАСТОТЫ ВРАЩЕНИЯ
Автоматическим регулятором называется прибор, обеспечивающий автоматическое поддержание заданного значения регулируемого параметра двигателя с заданной точностью.
Элемент автоматического регулятора, измеряющий отклонение какого-либо регулируемого параметра двигателя от его значения в заданном режиме работы, называется чувствительным элементом. Если чувствительный элемент системой соединительных элементов непосредственно связан с органом управления двигателем, то регулятор называется регулятором прямого действия.
Автоматические регуляторы прямого действия в зависимости от типа чувствительного элемента можно подразделять на механические, пневматические, гидравлические и электрические (см. Главу 5). Каждый из этих регуляторов в зависимости от числа регулируемых режимов может быть однорежимным (прецизионным или предельным), двухрежимным или всережимным.
В автомобильных двигателях применяются также автоматические регуляторы непрямого действия. Такие регуляторы, кроме чувствительного элемента, содержат усилительный и вспомогательные элементы. Основными признаками классификации таких регуляторов являются регулируемый параметр и тип примененной обратной связи.
Ниже даны сведения о чувствительных элементах механических регуляторов, понятия об основных характеристиках, и представлены схематичные описания принципов работы регуляторов различных типов.
Чувствительные элементы и основные характеристики
Чувствительные элементы. Механические чувствительные элементы состоят из вращающихся грузов 2 (рис. 4.1 ), которые шарнирно укреплены на траверсе 7, кинематически связанной с коленчатым валом двигателя. Грузы лапками 5 опираются на муфту 8 через подшипник. Центробежные силы грузов 2 воспринимаются пружиной (пружинами) 3. Грузы механических чувствительных элементов имеют различные формы в зависимости от требуемой массы и размеров внутренней полости регуляторов.
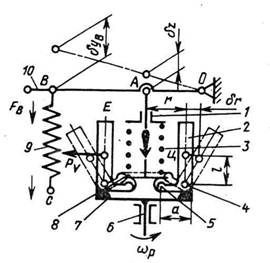
Рис. 4.1 Схема механического чувствительного элемента (предельный регулятор). 1 – опорная тарелка; 2 – груз; 3 – пружина соосная с муфтой; 4 – ось поворота груза; 5 – лапка; 6 – валик регулятора; 7 – траверса; 8 – муфта; 9 – пружина; 10 - рычаг
Восстанавливающая сила. Восстанавливающей называется приведенная к оси движения муфты сила, направленная на восстановление положения муфты при невращающихся грузах. Такая сила создается в основном пружиной чувствительного элемента. Силы тяжести грузов, рычагов и муфты существенно меньше усилия пружины, поэтому в первом приближении ими можно пренебречь. При перемещении муфты 8 (рис. 4.1) на δz восстанавливающая сила Е равна силе упругости FA пружины 3. Если пружина не соосна с муфтой (например, пружина 9), то из условия равенства работ Eδz = FB∙δyB получим для восстанавливающей силы Е = FB (δyB/δz).
Регуляторы прямого действия часто являются всережимными, причем всережимность обеспечивается изменением в процессе работы предварительной деформации пружины с помощью перемещения опорной тарелки 1 пружины 3 или точки С пружины 9. У таких всережимных механических чувствительных элементов деформация пружины в процессе работы складывается из предварительной деформации ∆ψ, устанавливаемой обслуживающим персоналом путем выбора положений тарелки 1 или точки С, и ∆d - текущей деформации пружины, вызываемой перестановкой муфты. Например, усилие пружины 9 в этом случае определяется по формуле:
FB = b (∆ψ + ∆d) (4.1)
где b - жесткость пружины. Тогда восстанавливающая сила будет:
Е = b (∆ψ + ∆d) (δув/δz) = ипb (∆ψ + ∆d), (4.2)
где ип = δyв/δz — передаточное отношение механизма, связывающего муфту с пружиной (рычагом ОВ). Текущая деформация пружины 9 связана с перемещением муфты соотношением ∆d = un∆z, поэтому
Е = E0 + bпр∆z (4.3)
где Е0 = unb∆ψ -начальное значение восстанавливающей силы, определяемое предварительной деформацией пружины; bnp = unb - приведенная к муфте жесткость пружины.
Выбор нескольких предварительных деформаций ∆ψi пружины позволяет определить набор характеристик E = f(ψ, z) всережимного, чувствительного элемента (рис. 4.2).
Поддерживающая сила. В процессе работы регулятора появляются силы, которые перемещают муфту и в зависимости от значения регулируемого, параметра удерживают ее в некоторых промежуточных равновесных положениях. Приведенная к муфте сила, которая удерживает муфту в промежуточном положении равновесия, называется поддерживающей. Эта сила в механических чувствительных элементах является приведенной к муфте центробежной силой грузов.
Если r - расстояние от центра тяжести груза до оси вращения, тг - масса груза и ωр - угловая скорость груза, то его центробежная сила (см. рис. 4.1)
 (4.4)
(4.4)
Преодолевая восстанавливающую силу Е, центробежные силы перемещают муфту чувствительного элемента вверх на δz, причем сами грузы удаляются от оси вращения по радиусу на расстояние δr. Воздействие центробежных сил Рv грузов на муфту можно заменить одной поддерживающей силой  , приложенной к муфте и действующей по оси ее движения. Значение этой силы определяют из условия равенства работ центробежных сил грузов, перемещающихся в направлении действия силы Рv на δr, и искомой силы, перемещающейся на δz:
, приложенной к муфте и действующей по оси ее движения. Значение этой силы определяют из условия равенства работ центробежных сил грузов, перемещающихся в направлении действия силы Рv на δr, и искомой силы, перемещающейся на δz:
 (4.5)
(4.5)
где iг - число грузов чувствительного элемента;  - коэффициент поддерживающей силы.
- коэффициент поддерживающей силы.
Как видно коэффициент А зависит от положения муфты, т. е.  . Путем умножения каждого значения А на
. Путем умножения каждого значения А на  = const можно получить сетку характеристики поддерживающей силы
= const можно получить сетку характеристики поддерживающей силы  при ряде ωр = const (рис 4.2). В некоторых случаях поддерживающая сила приводится к центру массы груза; тогда она обозначается
при ряде ωр = const (рис 4.2). В некоторых случаях поддерживающая сила приводится к центру массы груза; тогда она обозначается  . Условие равенства работ
. Условие равенства работ  показывает, что
показывает, что  , т.е. характеристика
, т.е. характеристика  является прямой.
является прямой.
Статические характеристики механического чувствительного элемента. При работающем чувствительном элементе (ωр ≠ 0) его поддерживающая сила  , преодолев восстанавливающую силу Е, удерживает муфту в некотором равновесном (установившемся) положении zо, определяемом условием:
, преодолев восстанавливающую силу Е, удерживает муфту в некотором равновесном (установившемся) положении zо, определяемом условием:
 (4.6)
(4.6)
Это условие называется уравнением статического равновесия муфты. С помощью таких уравнений определяют равновесные положения муфты zо в зависимости от значения регулируемого параметра ωр и строят статические характеристики (равновесные кривые) ωр = f(z) чувствительного элемента (или регулятора прямого действия). Для их построения необходимо зависимости Е = f(z) и = f (z) при ωр = const совместить на одном графике (рис. 4.2) и определить равновесные положения муфты zoi в виде абсцисс точек пересечения характеристик при известных значениях ωрi = const.
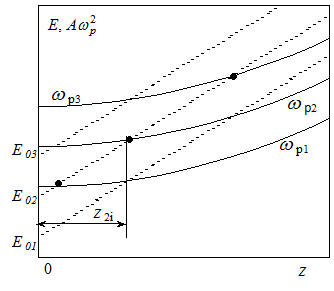 |
Рис. 4.2 Определение равновесных положений муфты zoi при различных угловых скоростях ωрi по характеристикам сил: ― поддерживающей; - - - восстанавливающей; ● – точки равновесия (E02, ωpi); z2i – равновесное положение муфты в точках равновесия.
Это позволит найти связь между равновесными положениями zoi муфты и соответствующими угловым скоростям ωрi и, следовательно, построить набор равновесных кривых чувствительного элемента ωр= f(z).
Фактор устойчивости регулятора. В процессе работы регулятора могут появиться импульсы сил, вызывающие отклонения муфты от положения равновесия. При таком восстанавливающая сила E оказывается меньше поддерживающей силы  , в результате чего создается избыточная сила
, в результате чего создается избыточная сила
Р = ( ) - Е > 0 (4.7)
возвращающая муфту в исходное положение (по аналогии с фактором устойчивости двигателя, см. формулу (1.5). При отклонении муфты в противоположном направлениивосстанавливающая сила Е становится больше поддерживающей , в результате чего избыточная сила
Р = ( ) - Е < 0 (4.8)
также стремится восстановить нарушенное положение равновесия. Несложно получить, что фактор устойчивости определяется по формуле:
 (4.9)
(4.9)
Положительное значение Fp, соответствует устойчивому положению равновесия муфты и чем больше Fp, тем выше устойчивость. При отрицательном значении Fp, положение равновесия является неустойчивым. Случай Fp = 0 свидетельствует о том, что характеристики = f(z) и Е = f(z) совпадают, и положение равновесия муфты является неопределенным. Такой регулятор называется астатическим.
Степень неравномерности. Регулятор ставится на двигатель для того, чтобы ограничить его обороты (и уменьшить подачу топлива) при сбросе нагрузки от полной до холостого хода. Тем не менее, число оборотов двигателя (следовательно, и регулятора) будет увеличиваться от  до
до  (двигатель) и от
(двигатель) и от  до
до  (регулятор), так как вал регулятора кинематически жестко связан с валом двигателя. В результате образуется так называемая регуляторная характеристика и регулятор должен устойчиво работать, по крайней мере, в диапазоне [ … ], подчиняясь условию статического равновесия. В этой связи важной характеристикой регулятора является степень неравномерности, определяемая по формуле:
(регулятор), так как вал регулятора кинематически жестко связан с валом двигателя. В результате образуется так называемая регуляторная характеристика и регулятор должен устойчиво работать, по крайней мере, в диапазоне [ … ], подчиняясь условию статического равновесия. В этой связи важной характеристикой регулятора является степень неравномерности, определяемая по формуле:
 (4.10)
(4.10)
Отметим, что эта величина связана с фактором устойчивости по соотношению:
 (4.11)
(4.11)
если предположить, что регуляторная характеристика является прямой линией.
Степень нечувствительности. Для перемещения рейки топливного насоса на нее нужно воздействовать некоторой силой. Обозначим эту силу, приведенную к оси движения муфты регулятора, через f. Так как сила f всегда направлена в сторону, противоположную направлению перемещения муфты, то в уравнение равновесия (4.6) она должна быть включена с двойным алгебраическим знаком:
 (4.12)
(4.12)
Из этого уравнения можно найти два предельных значения угловой скорости:
 (4.13)
(4.13)
соответствующих одному и тому же положению муфты:  - при увеличении угловой скорости грузов, а
- при увеличении угловой скорости грузов, а  - при ее уменьшении. При наличии силы f в интервале угловых скоростей - чувствительный элемент не реагирует на изменение угловой скорости валика регулятора, поэтому указанный интервал угловых скоростей называется областью нечувствительности, регулятора.
- при ее уменьшении. При наличии силы f в интервале угловых скоростей - чувствительный элемент не реагирует на изменение угловой скорости валика регулятора, поэтому указанный интервал угловых скоростей называется областью нечувствительности, регулятора.
Для характеристики нечувствительности регулятора введено понятие степени нечувствительности:
 (4.14)
(4.14)
Подстановка сюда выражений (4.12) с учетом того, что f << Е, приводит к отношению  или в соответствии с уравнением (4.6):
или в соответствии с уравнением (4.6):
 (4.15)
(4.15)
Из формулы (4.15) следует, что с уменьшением угловой скорости грузов регулятора его степень нечувствительности увеличивается, так как значения поддерживающей и восстанавливающей сил при этом уменьшаются.

