 2015-04-30
2015-04-30 1487
1487ДАНЕЛЬ В.В.
Г.
Содержание 2
1. Плоская система сходящихся сил. 3
1.1. Сила – вектор. 3
1.2. Сложение двух сил, сходящихся в одной точке.
1.3. Сложение нескольких сил, сходящихся в одной точке.
1.4. Равновесие системы сходящихся сил.
2. Плоская система произвольно расположенных сил.
2.1. Момент силы относительно точки.
2.2. Момент пары сил.
2.3. Главный вектор. Главный момент.
2.4. Влияние изменения центра привидения.
2.5. Равновесие твёрдого тела под действием плоской системы сил.
2.6. Типы опор.
2.7. Определение опорных реакций для простейших балок.
3. Анализ расчётных схем.
3.1. Переход от реальных конструкций к расчётным схемам.
3.2. Узлы стержневых систем.
3.3. Чем опасна мгновенная изменяемость.
3.5. Принципы образования мгновенно и геометрически неизменяемых систем.
3.6. Степени свободы. Статическая определимость.
4. Виды стержневых систем.
4.1. Балки.
4.2. Рамы.
4.3. Стержни.
4.3.1.Элементы ферм.
4.3.2.Работа ферм.
5. Аналитические методы определения усилий в плоских статически определимых фермах. Рекомендации по конструированию.
5.1. Метод вырезания узлов.
5.2. Метод моментных точек.
5.3. Метод проекций.
5.4. Рекомендации по конструированию ферм. Шпренгель
ные фермы.
6. Понятие о предельных состояниях. 50
7. Нормативные и расчётные сопротивления. 51
8. Коэффициенты ответственности и условий работы 51
9. Предельные гибкости стержней 55
10. Расчётные длины стержней. 55
11. Подбор сечений элементов ферм. 57
11.1. Подбор сечения растянутых элементов. 57
11.2. Подбор сечения сжатых элементов. 59
12. Сортамент. 62
Литература 70
Задания.
Задание №1. 70
Задание №2(для риэлтеров). 77
Темы рефератов по дисциплине «Основы проектирования». 80 - 94
1. ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ.
1.1. СИЛА-ВЕКТОР
Сила  вполне определяется четырьмя элементами (рис.1.1):
вполне определяется четырьмя элементами (рис.1.1):
1. Точкой приложения (начальной точкой) A;
2. Линией действия L, проходящей через точку A так, чтобы на ней лежал вектор силы.
3. Направлением вектора на прямой L, т.е указанием на то, по какую сторону от точки A на прямой L лежит точка B-конец вектора.
4. Длиной (модулем).
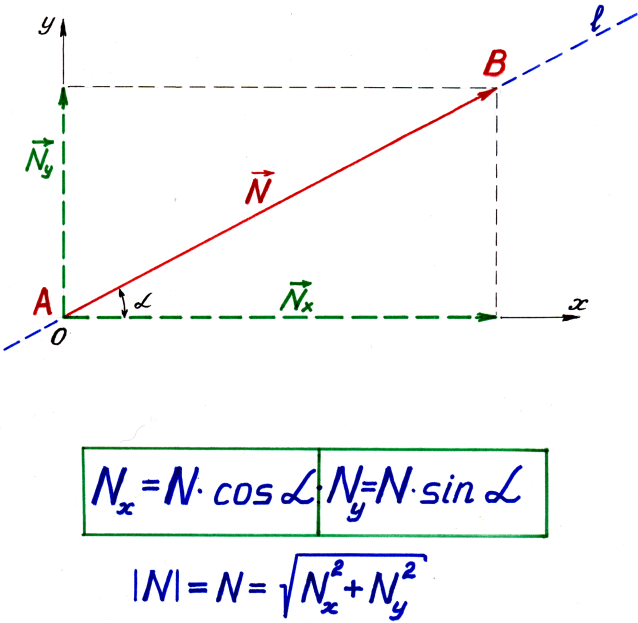
Рис.1.1
Величины проекций вектора на взаимно перпендикулярные оси x и y
 N
N  cos α;
cos α; 
В данном случае проекции положительны, т.к их направления совпадают с положительными направлениями выбранных осей. В противном случае проекция отрицательна.
Модуль вектора
 =
= 
Если сила параллельна оси, то проекция силы на эту ось равна модулю силы, взятому со знаком плюс или минус в зависимости от того, какой угол ( ) составляет сила с положительным направлением оси. Если сила перпендикулярна оси, то её проекция на эту ось равна нулю.
) составляет сила с положительным направлением оси. Если сила перпендикулярна оси, то её проекция на эту ось равна нулю.
1.2. СЛОЖЕНИЕ ДВУХ СИЛ, СХОДЯЩИХСЯ В ОДНОЙ ТОЧКЕ.
Рассмотрим подвеску контактного провода массой m (рис. 1.2а). Отбросим подвески, заменив их силами  и
и  , приложенными в узле 1 и направленными от него, т.е предположив подвески растянутыми. Равнодействующей усилий и будет сила
, приложенными в узле 1 и направленными от него, т.е предположив подвески растянутыми. Равнодействующей усилий и будет сила
= + ,
совпадающая с диагональю параллелограмма,построенного на исходных векторах-слагаемых (рис. 1.2б). Первый индекс означает номер точки приложения вектора, второй - в сторону которой направлен вектор.
а) б) в)
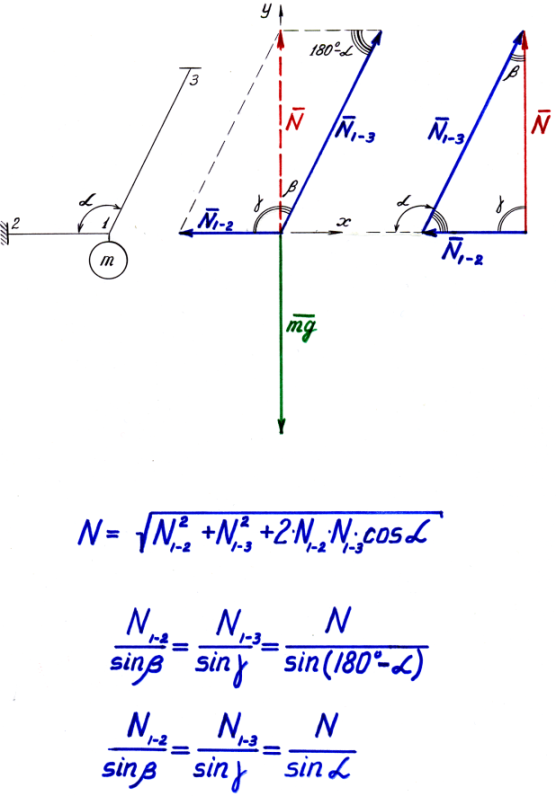
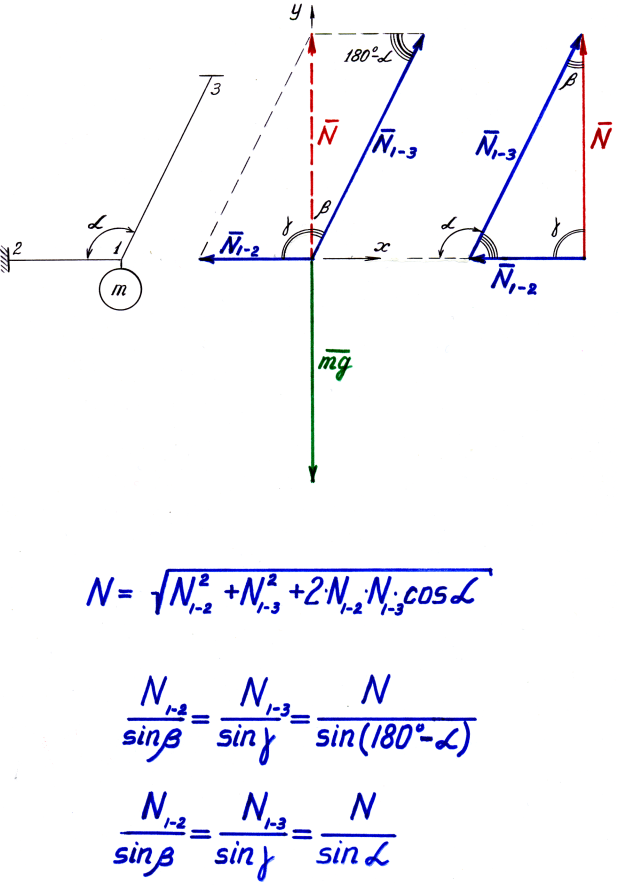
Рис.1.2
Суммой двух векторов и называют такой третий вектор , начало которого совпадает с началом вектора , а конец- с концом вектора , при непременном условии, что конец вектора совмещён с началом вектора (рис.1.2в).
Величина равнодействующей
N= 
По теореме синусов
или
1.3 СЛОЖЕНИЕ НЕСКОЛЬКИХ СИЛ, СХОДЯЩИХСЯ В ОДНОЙ ТОЧКЕ.
Полигоном нескольких векторов называется ломаная, составленная из этих векторов так, что конец одного из них совпадает с началом второго, конец второго – с началом третьего и т.д.
Суммой нескольких векторов называется вектор, идущий от начала полигона, составленного из векторов-слагаемых, к его концу (рис. 1.3).Сложение нескольких векторов может быть выполнено и последовательно (рис. 1.4).
Равнодействующую системы сходящихся сил можно определить и аналитически. Для этого выбирают систему координатных осей x и y, находят углы наклона каждой силы. Проекция равнодействующей на ось x равна алгебраической сумме проекций слагаемых сил на эту ось (рис.1.5)
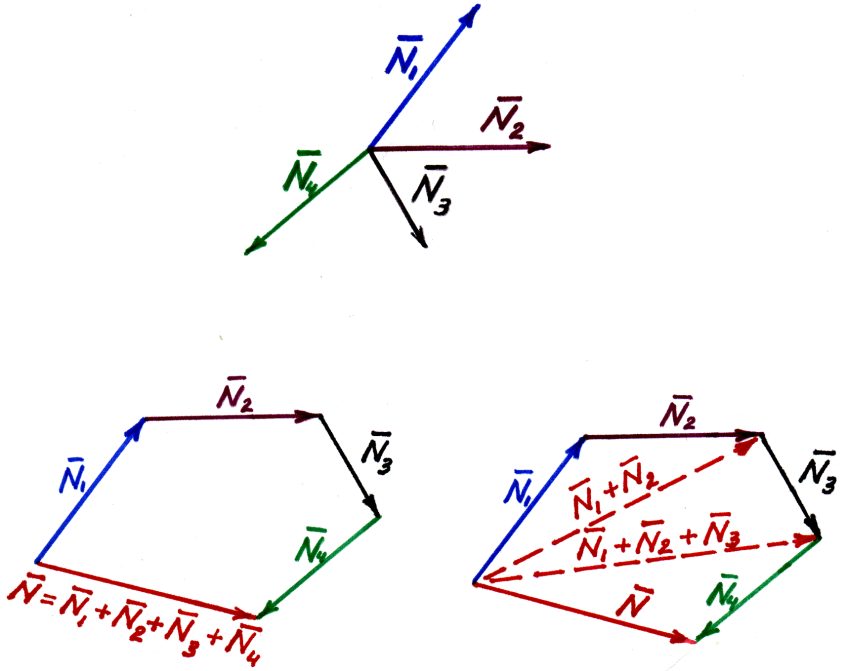
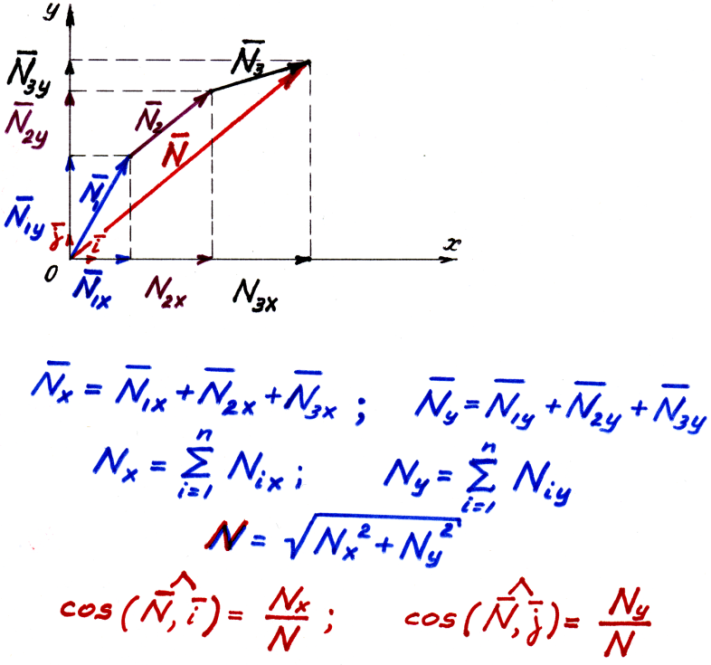
Рис. 1.3. Рис. 1.4. Рис.1.5.
 .
.
Аналогично
Здесь n-число слагаемых векторов. Величина равнодействующей
Направляющие косинусы:
 ,
,
где i, j - единичные вектора в направлении оси x и y соответственно.
1.4 РАВНОВЕСИЕ СИСТЕМЫ СХОДЯЩИХСЯ СИЛ.
Если полигон векторов замыкается, то сумма векторов, его составляющих, равна нуль - вектору. И наоборот. Для того,чтобы система сходящихся сил находилась в равновесии, необходимо и достаточно равенства нулю равнодействующей этой системы сил:
R=0.
Например, сумма сил (рис. 1,2, 1.6) из условия равновесия
 .
.
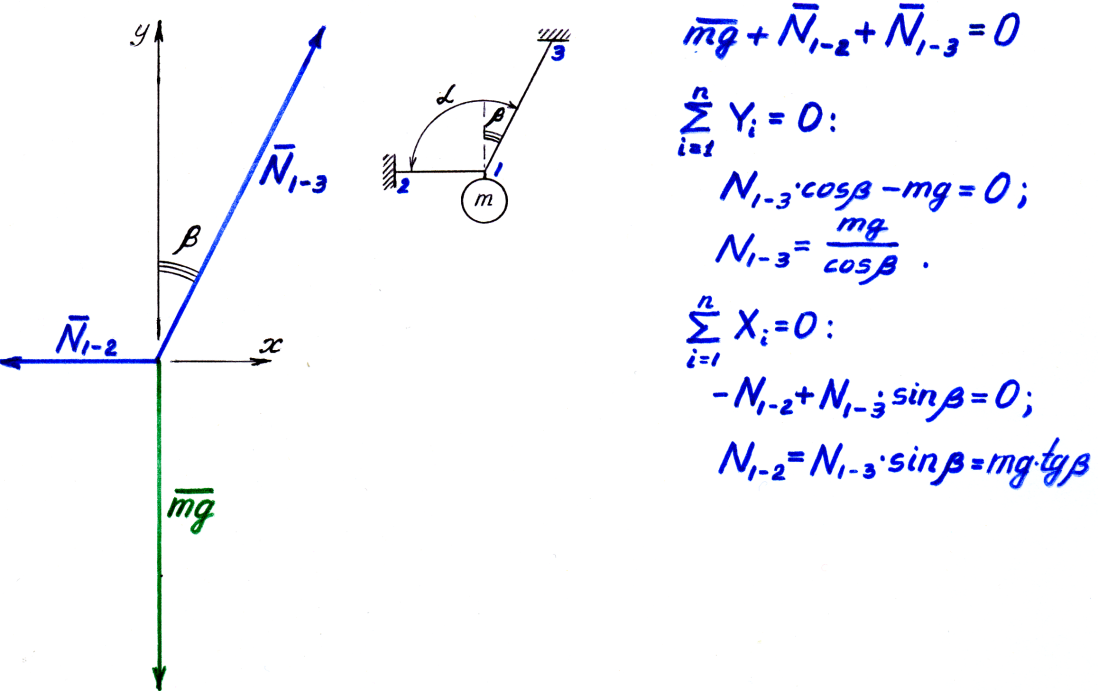
Рис.1.6.
В проекции на ось y при γ =  :
:

В проекции на ось x:

Знаки «+» говорят о том, что предположение о том, что усилия  и
и  являются растягивающими, верны.
являются растягивающими, верны.
2. ПЛОСКАЯ СИСТЕМА ПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ.
2.1. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ.
а) б)
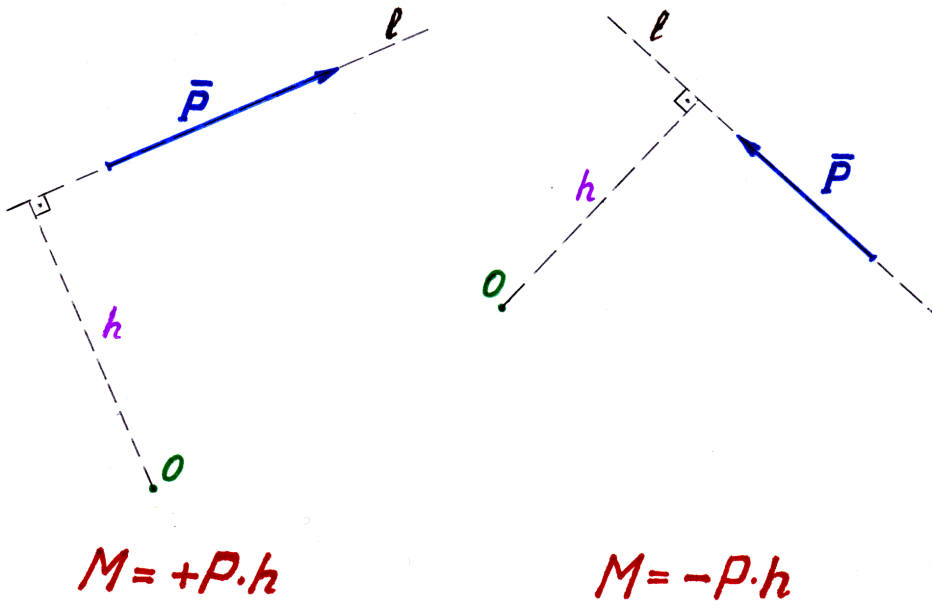
Рис.2.1.
На рис.2.1 ℓ-линия действия силы 
О - моментная точка: точка, относительно которой необходимо определить момент,
h - плечо: кратчайшее расстояние от моментной точки до линии действия силы (длина перпендикуляра).
Для рис.2.1а (сила Р старается повернуть по часовой стрелке):
M= +Рh.
Для рис.2.1б (вращение против часовой стрелки)
M= -Рh.
Моментом М силы  относительно точки О называется взятое со знаком произведение силы на плечо:
относительно точки О называется взятое со знаком произведение силы на плечо: 
 .
.
С понятием момента силы мы встречаемся, открывая дверь, водопроводный кран, затягивая гайку гаечным ключом, вращая педали велосипеда и т.д.
Слишком большой момент силы не всегда полезен. Чтобы не сорвать резьбу, ограничивают длину гаечного ключа. При заданных длине и поперечном сечении стойки необходимо ограничить размер рекламного щита, чтобы при порывах ветра стойку не согнуло (рис2.2).

Рис.2.2.
2.2. МОМЕНТ ПАРЫ СИЛ.
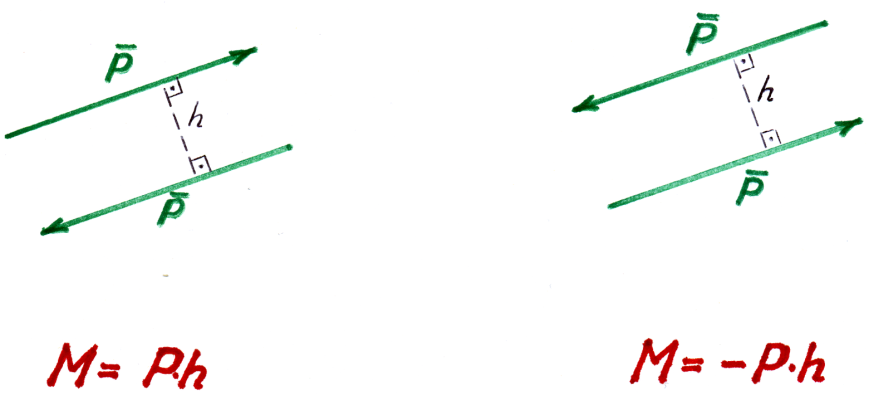
Рис.2.3.
Момент равных по величине, параллельных (колллинеарных), но с несовпадающими линиями действия противоположно направленных сил (рис. 2.3)
 ,
,
где h- расстояние между линиями действиями сил (плечо пары).
2.3. ГЛАВНЫЙ ВЕКТОР. ГЛАВНЫЙ МОМЕНТ.
Сложение сил, произвольно расположеных в плоскости, можно выполнить:
1) последовательным сложением;
2)приведением данной системы сил к произвольно выбранному центру.
Первый способ громоздок при большом количистве сил (а для пространственной неприменим).
Второй является общим и удобным.
Перенося все силы  произвольно в точку О, называемую центром приведения, получим приложенную в этом центре силу:
произвольно в точку О, называемую центром приведения, получим приложенную в этом центре силу:

и пару с моментом
Главный вектор системы сил- геометрическая сумма сил данной системы.
Главный момент плоской системы сил точки О- алгебраическая сумма мометов сил этой системы относительно точки О.
2.4. ВЛИЯНИЕ ИЗМЕНЕНИЯ ЦЕНТРА ПРИВЕДЕНИЯ.
Главный момент изменяется с изменением центра приведения.
Зависимость главного момента от выбора центра приведения:
 ,
,
где О и  -два разных центра приведения.
-два разных центра приведения.
1)Т.к. сила  и пара с моментом
и пара с моментом  лежат в одной плоскости, их можно привести к одной силе
лежат в одной плоскости, их можно привести к одной силе  , приложенной в некоторой точке
, приложенной в некоторой точке  .Эта сила
.Эта сила  является равнодействующей данной плоской системы сил.
является равнодействующей данной плоской системы сил.
ТЕОРЕМА ВАРИНЬОНА. Если R≠0,  ,то система сил приводится к одной равнодействующей, не проходящей через центр приведения О. При этом момент равнодействующей относительно любой точки будет равен алгебраической сумме моментов всех данных сил относительно той же точки.
,то система сил приводится к одной равнодействующей, не проходящей через центр приведения О. При этом момент равнодействующей относительно любой точки будет равен алгебраической сумме моментов всех данных сил относительно той же точки.
Если начало координат выбрано в центре приведения и известны проекции  всех сил на оси координат и координаты
всех сил на оси координат и координаты  точек их приложения, то момент равнодействующей находят по формуле
точек их приложения, то момент равнодействующей находят по формуле

2) Если R≠0,  ,система приводитя к равнодействующей , проходящей через центр приведения О.
,система приводитя к равнодействующей , проходящей через центр приведения О.
3)Если главный вектор равен нулю (R=0), а главный момент отличен от нуля ( ), данная система эквивалентна паре сил. Причём главный момент этой системы будет равен моменту этой пары
), данная система эквивалентна паре сил. Причём главный момент этой системы будет равен моменту этой пары  и не зависит в данном случае от центра приведения (от выбора точки О).
и не зависит в данном случае от центра приведения (от выбора точки О).
4) Если R=0, , система сил находится в равновесии. О равновесии плоской системы сил после рассмотрения примера.
Пример. Дана плоская система сил  В таблице 1.1. приведены проекции
В таблице 1.1. приведены проекции  этих сил на координатные оси, координаты () точек их приложения.
этих сил на координатные оси, координаты () точек их приложения.
Привести эту систему к началу координат. Найти линию действия равнодействующей.
Таблица 1.1
| Проекции и координаты | Силы | |||
| P1 | P2 | P3 | ||
| Проекции | X | -2 | ||
| Y | -3 | |||
| Коорди- наты | x | -2 | ||
| y | -1 | -3 |
Решение.
Найдём проекции главного вектора заданной системы сил:


Равнодействующая  .
.
Главный момент 
Пусть А (x,y) – точка действия линии искомой равнодействующей 

Поэтому
 .
.
С другой стороны, по теореме Вариньона
Следовательно,  , т.е.
, т.е.  .
.
Это и есть уравнение лини действия равнодействующей.
2.5. РАВНОВЕСИЕ ТВЁРДОГО ТЕЛА ПОД ДЕЙСТВИЕМ ПЛОСКОЙ СИСТЕМЫ СИЛ.
Для равновесия плоской системы сил, приложенных к твёрдому телу и не пересекающихся в одной точке, необходимо и достаточно, чтобы главный вектор этих сил и их главный момент  относительно произвольной точки О, лежащей в плоскости действия этих сил, были равны нулю, т.е.
относительно произвольной точки О, лежащей в плоскости действия этих сил, были равны нулю, т.е.
В проекциях на оси x и y:

Условия равновесия плоской системы сил, произвольно расположенных в плоскости, можно представить ещё в двух других видах.
1. Алгебраическая сумма моментов сил относительно трёх произвольных точек A,B,C, не лежащих на одной прямой, равна нулю, т.е.
2) Алгебраическая сумма моментов всех сил относительно трёх произвольных точек A и B равна нулю, и сумма проекций этих сил на какую-либо ось, не перпендикулярную прямой, соединяющий точки A и B, равна нулю, т.е.
В частном случае, когда все силы плоской системы параллельны, условия равновесия выражается двумя уравнениями вместо трёх (ось Ox параллельна данным силам):
Либо в виде
где прямая AB не параллельна данным силам.

