 2015-04-30
2015-04-30 4810
4810Балка, загруженная сосредоточенным моментом m(рис.2.13).
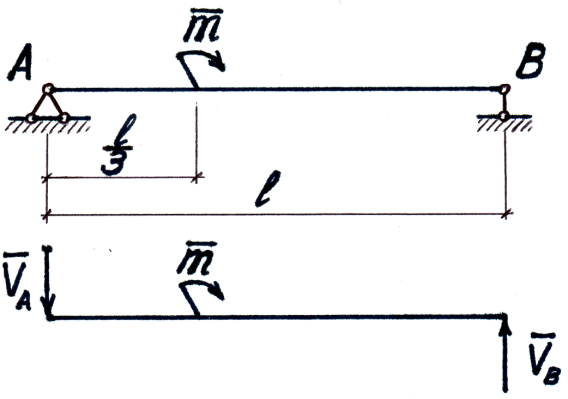
Рис.2.13.
Моментные уравнения равновесия:


Каждая из опорных реакций равна величине сосредоточенного момента, деленного на величину пролёта.
Размерность сосредоточенного момента [H×м].
Пример 3 (рис.2.14).
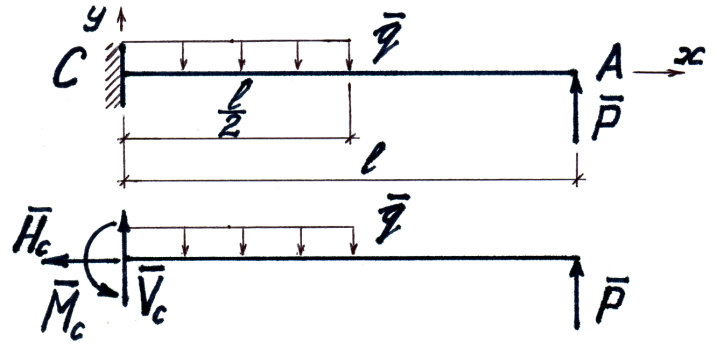
Рис.2.14.
Уравнение равновесия в проекции на ось x:
т.е. горизонтальную составляющую реакции на рисунке можно было не показывать(как это было сделано в примере 2).
В проекции на ось y

Моментное уравнение равновесия относительно точки С:

Здесь  –равнодействующая распределённой нагрузки,
–равнодействующая распределённой нагрузки,  -плечо равнодействующей.
-плечо равнодействующей.
Реактивный момент

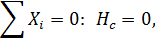
Пример 4 (рис.2.15).
Рис.2.15.
Моментные уравнения равновесия.


Проверка:

Реакции найдены верно.
3. АНАЛИЗ РАСЧЁТНЫХ СХЕМ.
3.1. ПЕРЕХОД ОТ РЕАЛЬНЫХ СООРУЖЕНИЙ К РАСЧЁТНЫМ СХЕМАМ.
Расчётная схема может быть совсем не похожа на тот объект, который она моделирует. Например, очень похожи расчётные схемы ракеты с жидкостными реактивными двигателями и мачты с оттяжками: в обоих случаях- стержень с присоединёнными к нему по длине осцилляторами (массами на пружинках). Именно при переходе к расчётной схеме происходит первый этап получения погрешности. Второй этап получения погрешности имеет место при использовании методов расчета. Третий этап имеет место при попытках применения результатов расчёта к реальной конструкции.
Динамические нагрузки- это такие нагрузки, при действии которых в конструкциях надо учитывать инерционные силы. Например, сейсмические, пульсационные составляющие ветрового действия, от промышленного оборудования, транспорта и т.п.
Статические нагрузки- частный случай динамических: когда в следствие малой скорости приложения нагрузки, длительного периода их неизменяемости влиянием инерционных сил можно пренебречь. Например, снеговые, собственный вес конструкций и т.п.
Расчётная схема моделирует и само сооружение, и действие нагрузки на него, и схему взаимодействия сооружения с основанием. Чем сложнее нагрузка, закон её изменения, тем проще должна быть расчетная схема самого сооружения.
С одной стороны, расчетная схема должна как можно точнее отражать действительность, а с другой- расчётная схема должна быть такой, чтобы её можно было рассчитать известными методами. В результате приходят к определённому компрамису.
Различают расчётные схемы, используемые для ручного и для машинного счёта.
С развитием вычислительной техники, программных комплексов, методов расчёта появляется возможность более детального изучения работы сложных конструкций и сооружений. С другой стороны, повышается роль ручного счёта, как средства контроля над достоверностью полученных результатов расчёта.
Ответственные конструкции рассчитывают с использованием как минимум двух независимых сертифицированных программ. И результаты расчёта по ним сравнивают между собой и с результатами ручного счёта. Расхождение результатов расчётов до 20% считается нормальным: в принципе, любой расчёт здания, сооружения является приближённым. После того, как будут найдены все усилия в элементах конструкции от расчётных воздействий, определяют необходимые размеры сечений элементов (при нескольких видах воздействий расчетным будет то, при котором усилие максимально).
О расчётной схеме мостового пролёта было рассказано в параграфе 2.6. Аналогичные расчётные схемы имеют ригель (рис.2.5б) и плита перекрытия (рис.2.5в).
На рис.2.5б показан железобетонный ригель 1, опирающийся на скрытые консоли 2 железобетонных колонн 3. Такую схему опирания применяют в общественных зданиях с железобетонным каркасом. На ригеля опираются многопустотные железобетонные плиты 4. По плитам выполнена конструкция поля 5.
Схема опирания плит перекрытия 4 на ригеля 1 показана на рис.2.5в.
Рис. 3.1 и 3.2 поясняют правило определения величины расчётных пролётов ригеля и плиты. Если предположить, что изменение реактивного давления вдоль площадки опирания длиной  подчинено линейному закону и его график имеет вид треугольника, то равнодействующая будет находиться на расстоянии
подчинено линейному закону и его график имеет вид треугольника, то равнодействующая будет находиться на расстоянии  от наибольшей ординаты. Соответственно, расчётный пролёт для ригеля
от наибольшей ординаты. Соответственно, расчётный пролёт для ригеля

Аналогично для плиты

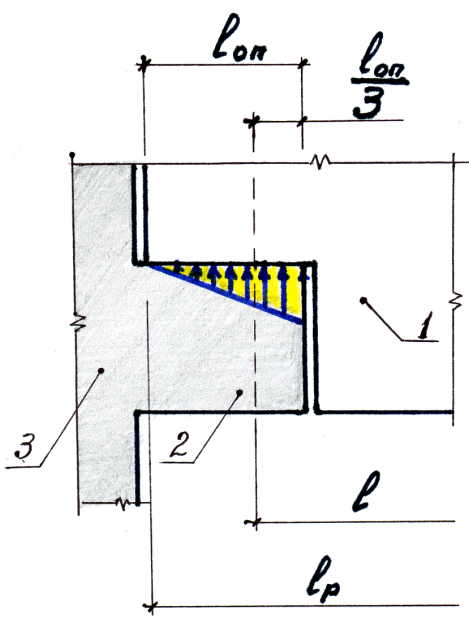
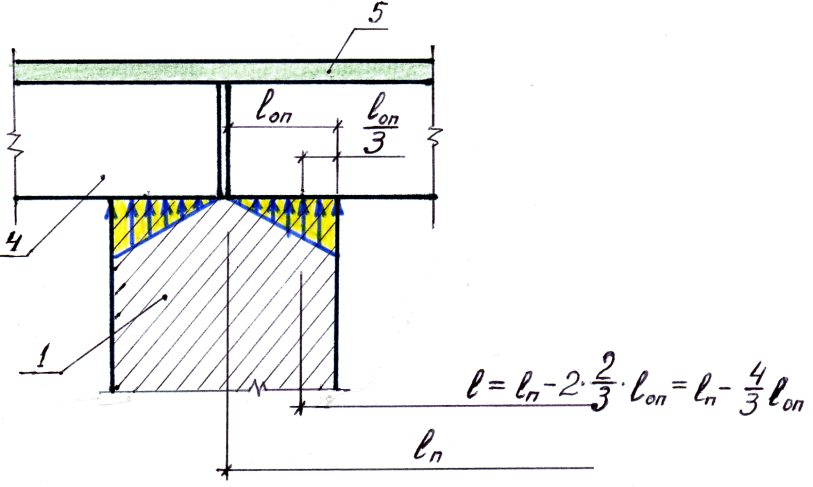
Рис.3.1. Рис.3.2.
Здесь  и
и  - длины ригеля, плиты соответственно.
- длины ригеля, плиты соответственно.
На рис3.3 показана расчётная схема ствола радиотелевизионной передающей станции (РТПС) башни. Вертикальный стержень моделирует ствол с геометрическими, упругими и массовыми характеристиками на каждом участке. Стержни 1 и 2 введены искусственно. На самом деле их не существует.
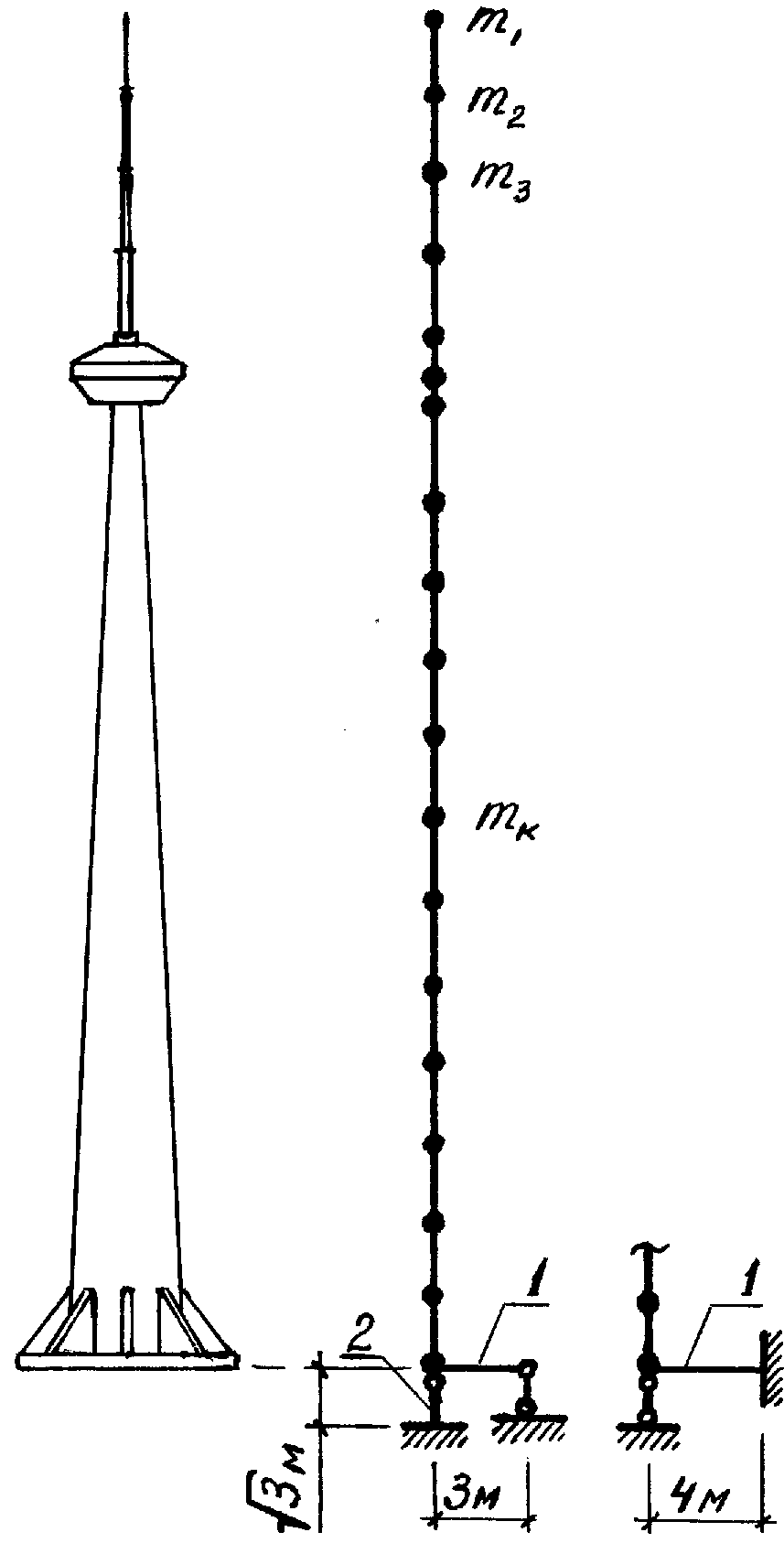
Рис.3.3
Горизонтальный стержень 1 моделирует жёсткость упругого основания при повороте подошвы фундаментной плиты относительно горизонтальной оси, проходящей через центр тяжести подошвы перпендикулярно плоскости колебаний (упругое неравномерное сжатие). Вертикальный стержень 2-при упругом равномерном сдвиге. Рекомендуемые длины этих стержней показаны на рисунке и зависят от граничных условий на их торцах.
При указанных на рисунке граничных условиях и соответствующих им длинах изгибная жёсткость стержня 1 равна  - коэффициенту жёсткости основания при неравномерном сжатии,
- коэффициенту жёсткости основания при неравномерном сжатии,  а изгибная жёсткость стержня 2 -
а изгибная жёсткость стержня 2 -  (коэффициенту жёсткости основания при равномерном сдвиге,
(коэффициенту жёсткости основания при равномерном сдвиге, 
Важным этапом перехода к расчётной схеме является сбор и моделирование нагрузок, действующих на сооружение, здания и их элементы.
3.2. УЗЛЫ СТЕРЖНЕВЫХ СИСТЕМ.
Стержневыми системами (фермами) называют конструкции из стержней, соединенных между собой в узлах.
Различают три основных вида узлов: 1)жёсткие; 2)шарнирные; 3)упругие.
3.2.1. Жёсткие узлы (рис.3.4).
Например, узлы монолитных железобетонных конструкций.
При деформации системы углы между осями стержней, примыкающих к узлу, остаются неизменными.
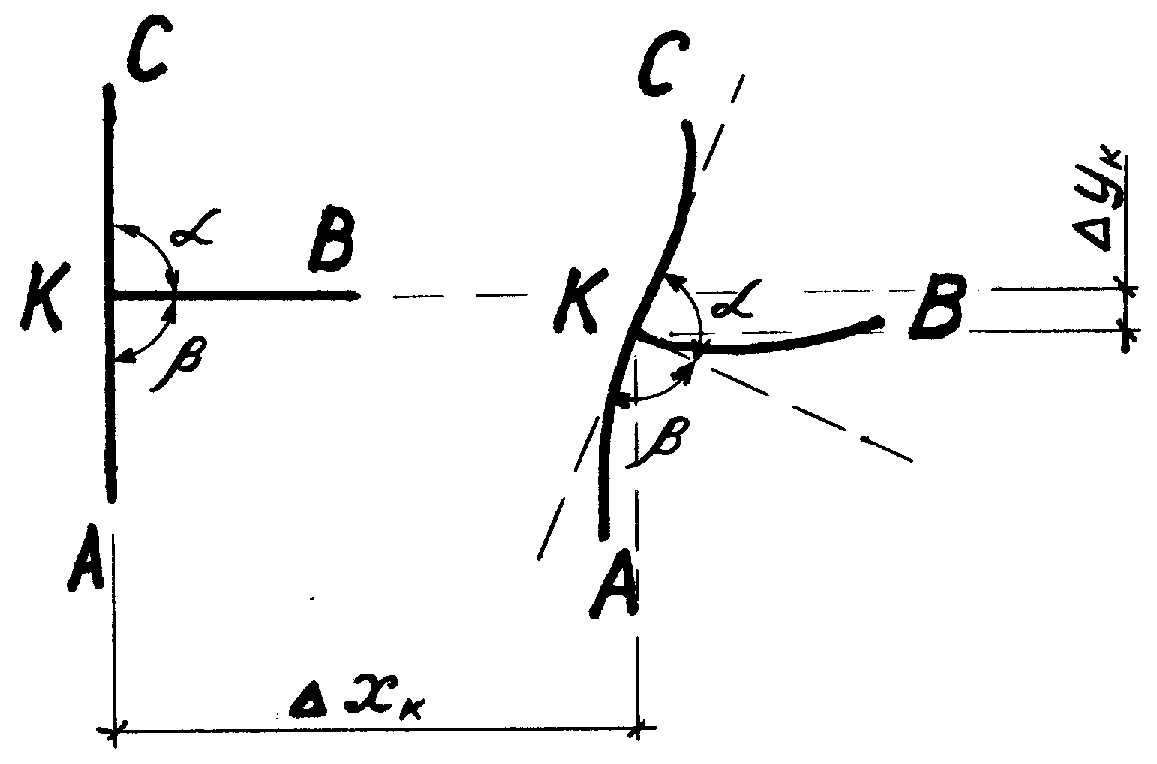
Рис.3.4.
3.2.2. Шарнирные узлы (рис3.5).
При деформации системы стержни, примыкающие к узлу, свободно поворачиваются относительно друг друга.
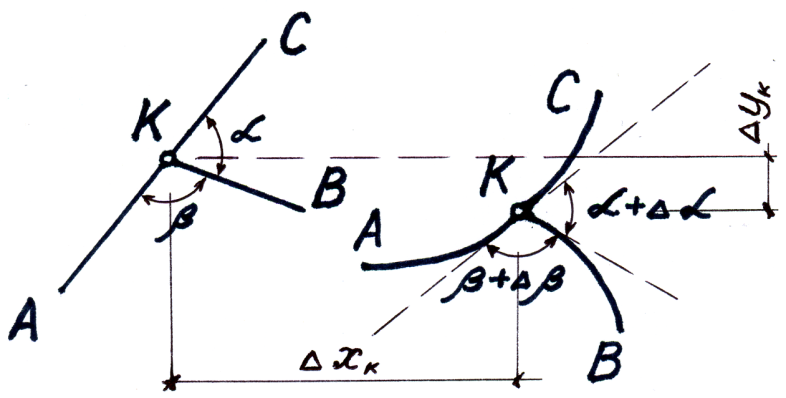
Рис.3.5.
Изгибающие моменты в сечениях стержней около шарниров отсутствуют.
Каждый шарнир в плоскости имеет две степени свободы.
Кратность шарнира равна числу стержней, которые он соединяет, минус единица. Кратность показанного на рис.3.5 шарнира равна двум (двукратный шарнир).
3.2.3. Упругие узлы (рис.3.6).
В них возникают внутренние силы, зависящих от взаимных смещений и поворотов примыкающих к узлу стержней. Например, в упругом узле на рис.3.6 момент пропорционален углу взаимного поворота стержней  .
. 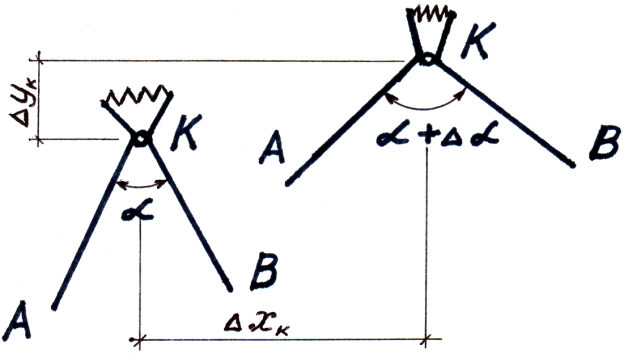
Рис.3.6.
3.3. ЧЕМ ОПАСНА МГНОВЕННАЯ ИЗМЕНЯЕМОСТЬ.
Диск- это жёсткая (геометрически и мгновенно неизменяемая) система. Простейшим диском является стержень.
Рассмотрим симметричную систему из двух дисков (рис.3.7). В ней 1, 2 и 3-номера узлов. В данном случае это шарнирные узлы. α - угол наклона стержней.  –продольные усилия в соответствующих стержнях от заданной нагрузки P.
–продольные усилия в соответствующих стержнях от заданной нагрузки P.
Вырежем узел 2. Действия отброшенных стержней заменяем силами . Последовательность расположения индексов говорит о том, что усилия направлены от узла, т.е. предполагаем стержни растянутыми.
 . (3.1)
. (3.1)
Геометрически это выглядит так(рис.3.8): замкнутый многоугольник(треугольник),построенный на векторах. Т.е. равнодействующая система сил равна нулю. Запишем уравнение (1) в проекциях на ось
 :
:
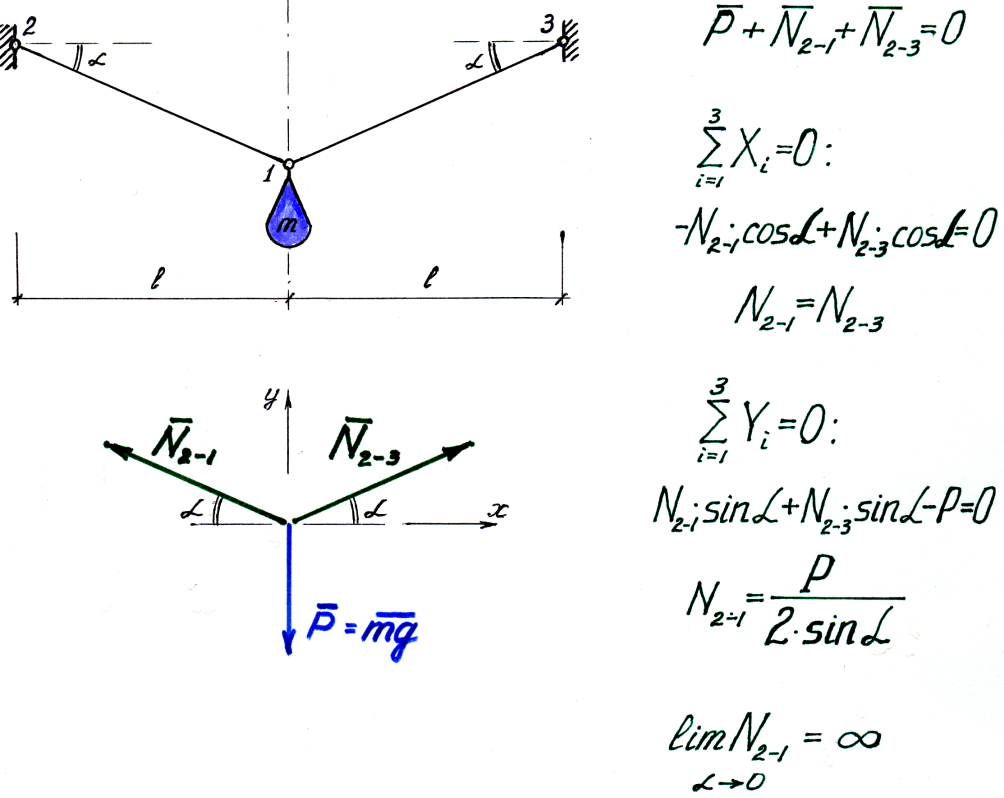
Рис.3.7.
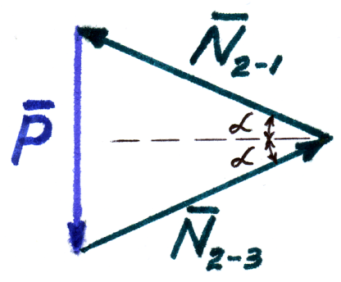
Рис.3.8.
 (3.2)
(3.2)
 (3.3)
(3.3)
Из (2): 
Из (3):  . (3.3)
. (3.3)
Знак  говорит о том, что стержни (2-1) и (2-3) растянуты, т.е. первоначальное предположение подтверждено.
говорит о том, что стержни (2-1) и (2-3) растянуты, т.е. первоначальное предположение подтверждено.
При α стремящейся к нулю  также стремится к нулю:
также стремится к нулю:
 .
.

В результате усилия стремятся к бесканечности:
 .
.
Т.е. расположение узлов 1, 2 и 3 на одной прямой опасно для конструкции: она будет мгновенно изменяемой в начальный момент времени.
Другими словами, три диска нельзя соединять шарнирами, лежащими на одной прямой (здесь опорная конструкция принята за один диск).
По этой причине, например, провода линий электропередач всегда имеют провис.
Аналогично, два диска нельзя соединить тремя стержнями, линии действия которых (оси) пересекаются в одной точке (рис.3.9). Эта система так же мгновенно изменяема.
На рис.3.10 показано присоединение диска к основанию тремя параллельными стержнями1, 2 и 3. Точка пересечения этих стержней находится в бесконечности. Полученная система является изменяемой. Причём первоначальное положение этой системы является неустойчивым.
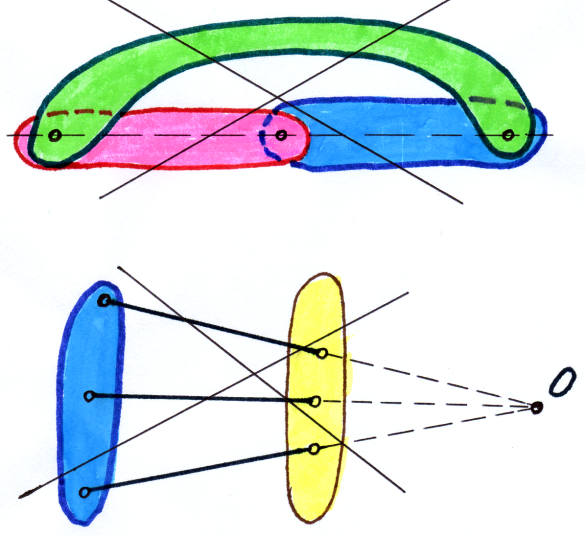
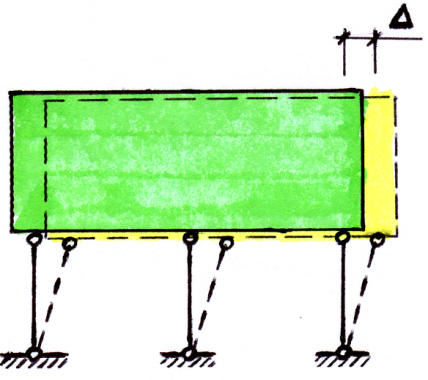
Рис.3.9. Рис.3.10.
На рис.3.11 приведены схемы мгновенно изменяемых систем: консольной фермы (а), балки (б), рамы (в). Мгновенно изменяемые системы опасны тем, что в их элементах возникают бесконечно большие усилия, приводящие к разрушению: хрупкому или пластичному.
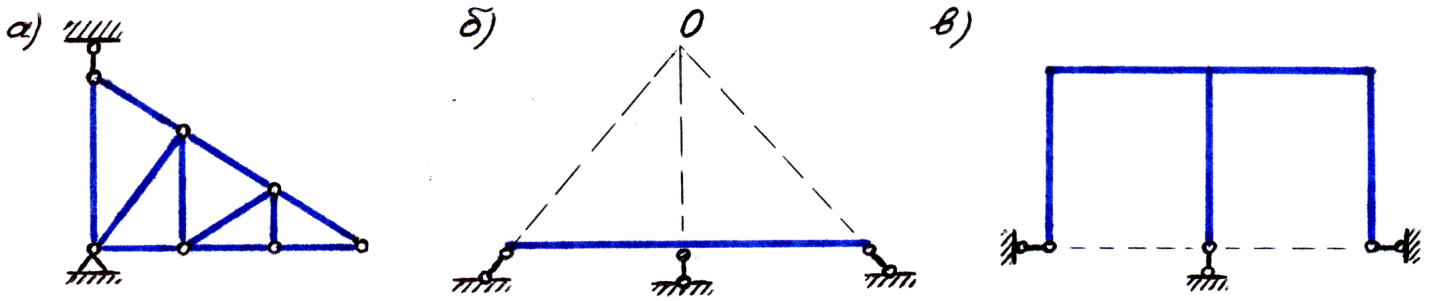
Рис.3.11.
Изменяемость называют мгновенной, потому что она по названным выше причинам существует в течение очень короткого промежутка врмени: пока вследствие огромных усилий не изменится взаимное расположение шарниров. Но по истечении этого промежутка времени система может превратится в механизм и обрушиться.
3.4. ПРИНЦИПЫ ОБРАЗОВАНИЯ МГНОВЕННО И ГЕОМЕТРИЧЕСКИ НЕИЗМЕНЯЕМЫХ СИСТЕМ.
Два диска можно соединять либо с помощью шарнира и стержня, не проходящего через шарнир (рис.3.10а),либо с помощью трёх стержней, оси которых не пересекаются в одной точке (рис.3.12б).
Три диска могут быть соединены тремя шарнирами, не лежащими на одной прямой (рис.3.13).
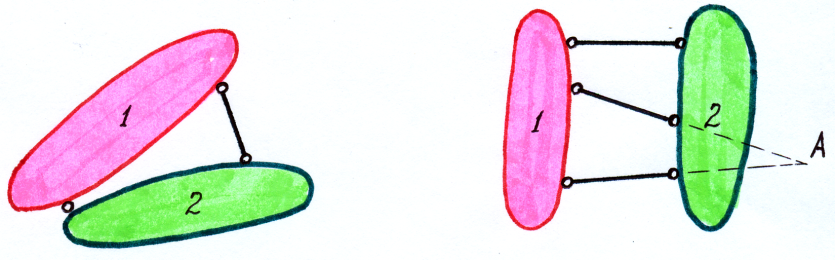
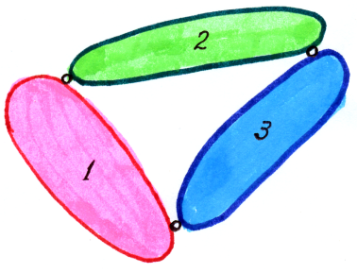
Рис.3.12. Рис.3.13.
Во всех этих случаях в результате образуются новые неизменяемые системы. На рис.3.14 показаны мгновенно и геометрически неизменяемые схемы консольной фермы (а), балок (б), рам (в, д) (сравните с рис.3.11) и консольно-балочной фермы (рис.3.14 г).
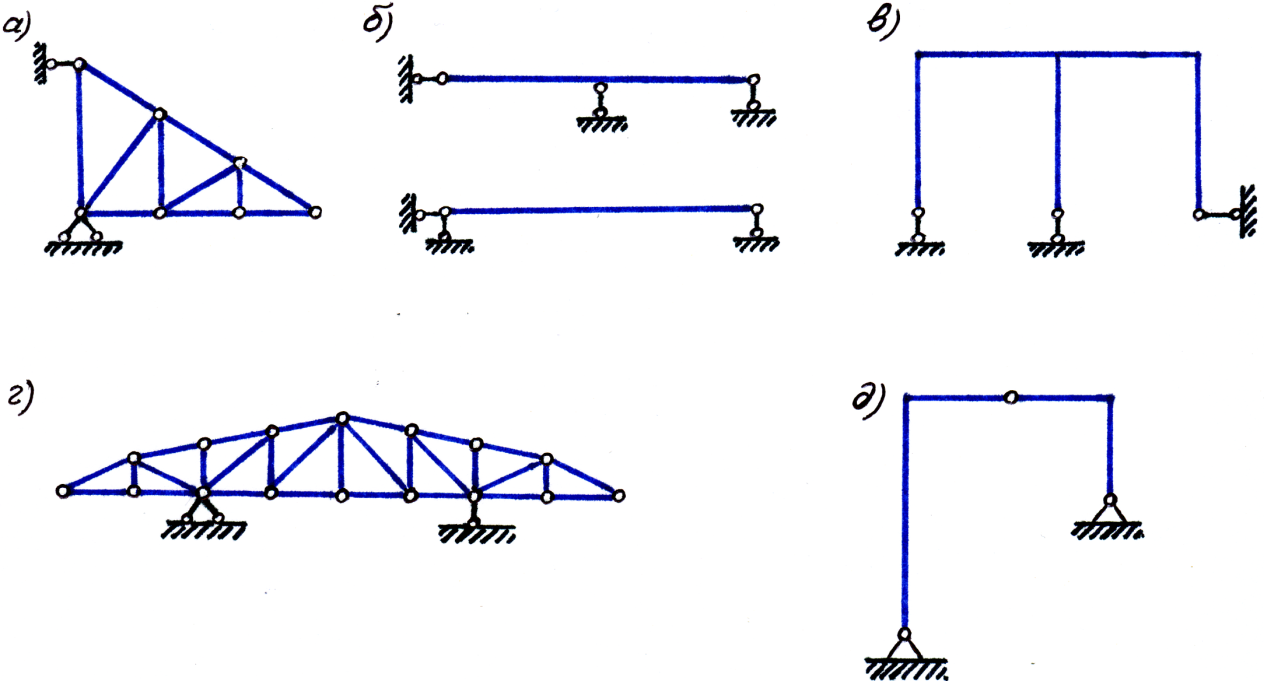
Рис.3.14.
3.5. СТЕПЕНИ СВОБОДЫ. СТАТИЧЕСКАЯ ОПРЕДЕЛИМОСТЬ.
Систему, неизменяемость которой доказана, называют диском. Каждый диск в плоскости имеет три степени свободы: возможность перемещения вдоль каждой из пересекающихся осей и поворота (рис.1.15).
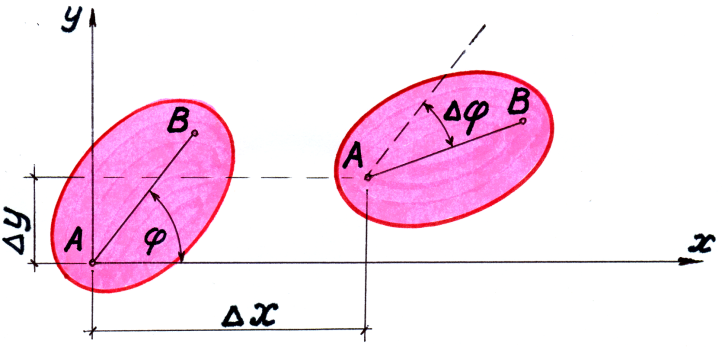
Рис.3.15.
Каждая опора диска отнимает у последнего определённое число степеней свободы: шарнирно подвижная- одну, шарнирно неподвижная – две, заделка-три.
Одна связь отнимает одну степень свободы. У шарнирно подвижной опоры одна связь, у шарнирно неподвижной-две, у заделки- три. Для системы из D дисков степень статистической определимости

где Ш - число однократных промежуточных шарниров (кратность узла), С-число степеней свободы, отнимаемых у системы опорами (внешними связями).
При  имеем механизм: изменяемую систему,
имеем механизм: изменяемую систему,
при  – статически определимую систему,
– статически определимую систему,
при  - статически неопределимую систему.
- статически неопределимую систему.
Реальные сооружения должны быть неизменяемыми системами, способными воспринимать нагрузку без заметного изменения геометрической формы.
Cтержневая система называется геометрически неизменяемой, если невозможны перемещения её точек без изменения длин стержней. Неизменяемая система способна воспринимать нагрузку до наступления разрушения материала.
В статически определимой системе усилия могут быть найдены с помощью уравнений равновесия.
В статически неопределимых системах приходиться дополнительно использовать условия совместности деформаций.
ТЕОРЕМА:
неизменяемые системы, все связи которых необходимы, являются статически определимыми системами.
Для балки на двух опорах и рамы (рис.3.14)

т.е. они статически определимы.
Для фермы на рис.3.16 цифрами около каждого узла показана кратность шарнира (каждый однократный шарнир в системе из дисков эквивалентен наложению двух связей).
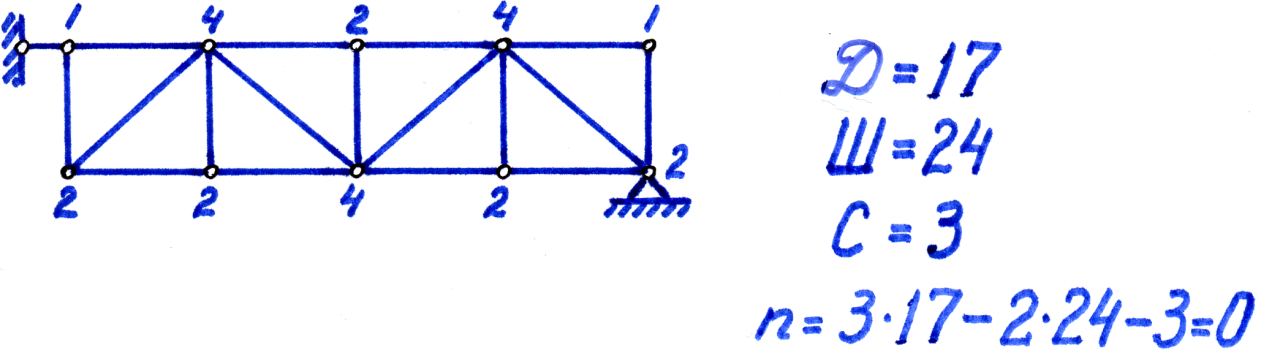
Рис.3.16.
D=17, Ш=24, С=3.

Ферма также статистически определима.
Для рамы на рис.3.17.

т.е. она 9 раз статически неопределима.
В раме на рис.3.18 с жёсткими узлами имеются замкнутые контуры. Приведенный здесь способ определения статической определимости для неё не подходит.
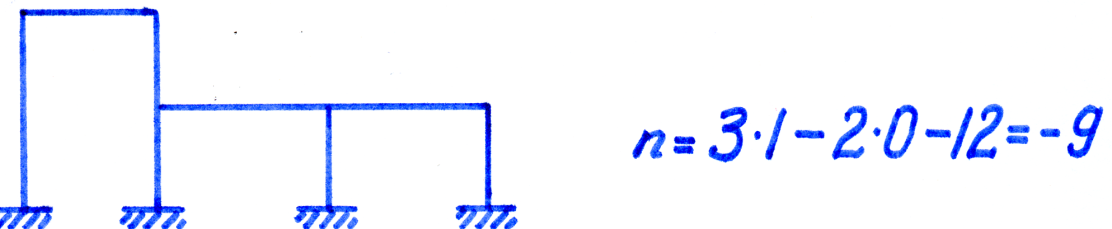
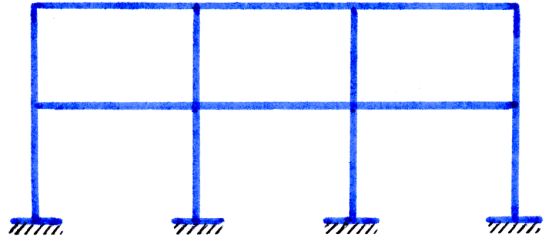
Рис.3.17. Рис.3.18.
4. ВИДЫ СТЕРЖНЕВЫХ СИСТЕМ.
4.1. БАЛКИ.
Различают следующие виды балок.
Консольные балки (рис.2.14).
Двух опорные балки (рис.2.12,2.13,2.15), в т.ч. консольно-пролётные (рис.2.15).
Составные (многошарнирные) балки (рис.4.1).
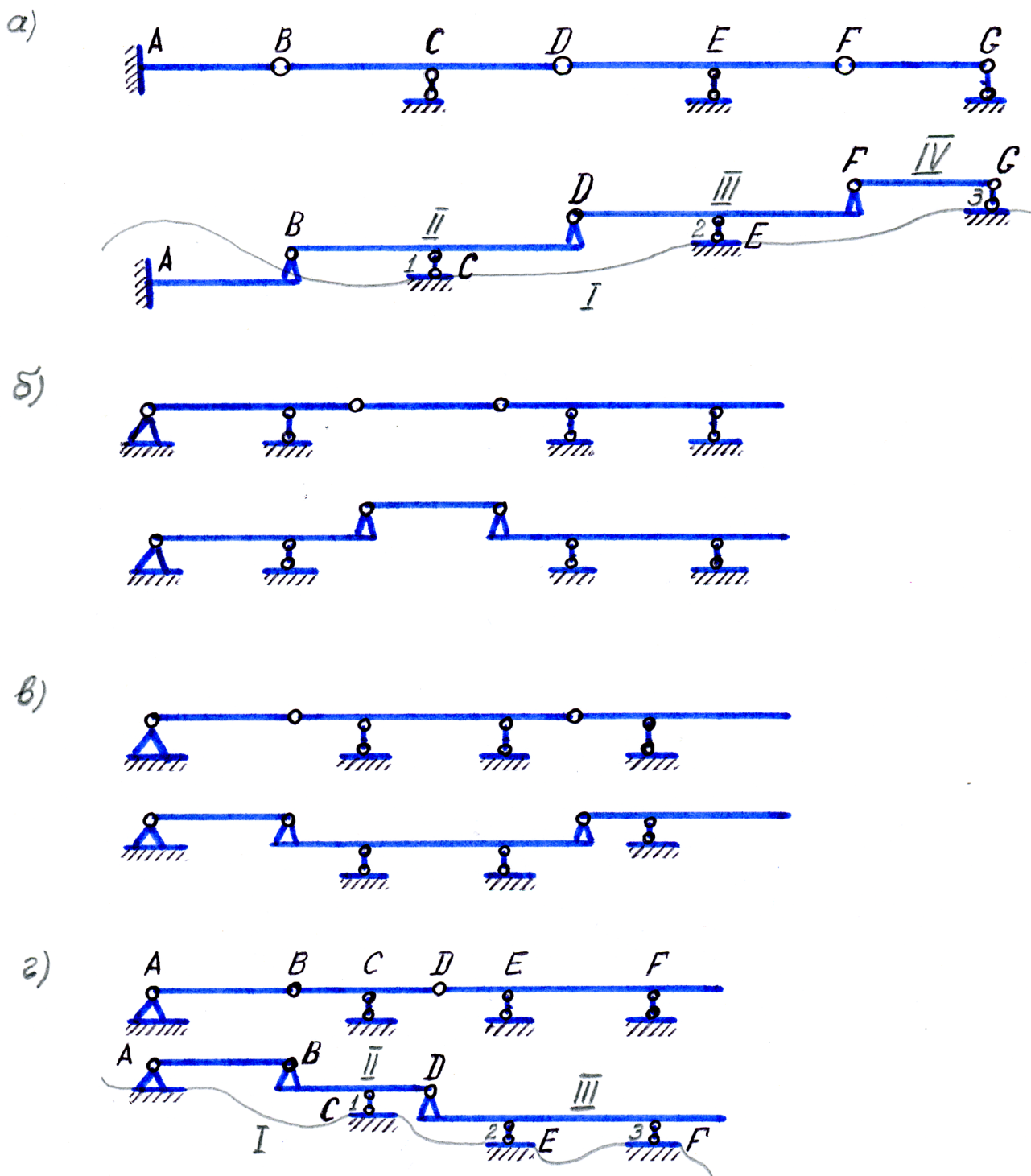
Рис.4.1. Составные балки и их поэтажные схемы.
Многопролётные балки (рис.4.2)

Рис.4.2. Многопролётная нарезная балка.
Исследуем их образование на примере балки (а) (рис.4.1а).
На её поэтажной схеме основание обозначено цифрой I.В него включена и жёстко присоединённая консольная балка АВ. К основанию присоединён диск II шарниром В и стержнем 1 (ось стержня 1 не пересекает шарнир В). Следовательно, диски I и II можно объединить в единый диск, к которому диск III присоединён шарниром D и стержнем 2 и т.д. Т.е. система на рис.4.1а является геометрически неизменяемой. Кроме того, имеет только необходимые стержни ( Поэтому статически определима.
Поэтому статически определима.
В составной балке на рис.4.1г диск II соединён с диском I двумя стержнями (1 и АВ), оси которых пересекаются в точке С. Диск III соединён с основанием диска I двумя параллельными стержнями:2 и 3, точка пересечения которых находится в бесконечности. Диски II и III соединены шарниром D. Таким образом, имеем случай соединения трёх дисков с помощью шарнира и четырёх стержней. Причём точка пересечения стержней и шарнир не лежат на одной прямой. Система дисков I, II и III представляет собой неизменяемую систему.
Кроме того, эта система является и статически определимой, т.к. для неё 
Аналогично можно доказать неизменяемость и статическую определимость балок, изображённых на рис.4.1б и 4.1в.
При определении опорных реакций и усилий в составных балках после составления поэтажной схемы расчёт начинают с верхней балки и заканчивают самой нижней.
Многопролётная балка- это балка, которая покоится на нескольких промежуточных опорах (рис.4.1 и 4.2).
4.2. РАМЫ.
Рамой называют стержневую систему из прямолинейных стержней,соединённых жёсткими и шарнирными узлами. Рамы на рис.3.14в, 3.14д, 3.17, 3.18 являются неизменяемыми. Рамная схема зданий и сооружений является одной из самых распространённых (рис.4.7).
4.3. ФЕРМЫ.
4.3.1 ЭЛЕМЕНТЫ ФЕРМ.
Различают фермы плоские и пространственные.
Плоская ферма-это система со сквозной стенкой. Обычно их используют для перекрытия больших пролётов. Ферма состоит из двух поясов, объединённых в единую конструкцию с помощью решетки: раскосов и стоек (рис.4.3). Наружные стержни называют поясами, все остальные – решёткой. Верхним поясом называют систему стержней, ограничиващих верхний контур фермы, нижним – нижний контур.
Все элементы ферм соединяются в узлах.
На рис.4.3б показано как две главные фермы моста с помощью балочной клетки и ветровых связей объединяют в жёсткую пространственную конструкцию. Балочная клетка представляет собой систему продольных и поперечных балок. Нагрузка от подвижного состава передаётся на продольные балки, через которые - на узлы главных ферм.
Т.к.летом ферма длиннее, чем зимой, опоры с одной стороны моста выполнены шарнирно-неподвижными, а с другой- шарнирно - подвижными, чтобы не препятствовать изменению длины. Этой же цели служит расположенный рядом с шарнирно- подвижной опорой температурный шов шириной  .
.
На рис.4.3 обозначены: 1-верхний пояс, 2-нижний пояс, 3-стойка, 4-раскос,
5-узел, 6-панель, 7-шарнирно-неподвижная опора,
8-шарнирно-подвижная опора, 9-главные формы,
10-ветровые связи, 11-продольные балки, 12-поперечные балки,
13-косынка(стальной лист). 14-продольные оси поясов и стоек, совпадающие с центрами тяжести и их поперечных сечений.
|| -обозначение сварного шва,выполненного на заводе.
 -обозначение сварного шва,выполненного на стройплощадке при укрупнительной сборке фермы, l - пролёт фермы.
-обозначение сварного шва,выполненного на стройплощадке при укрупнительной сборке фермы, l - пролёт фермы.
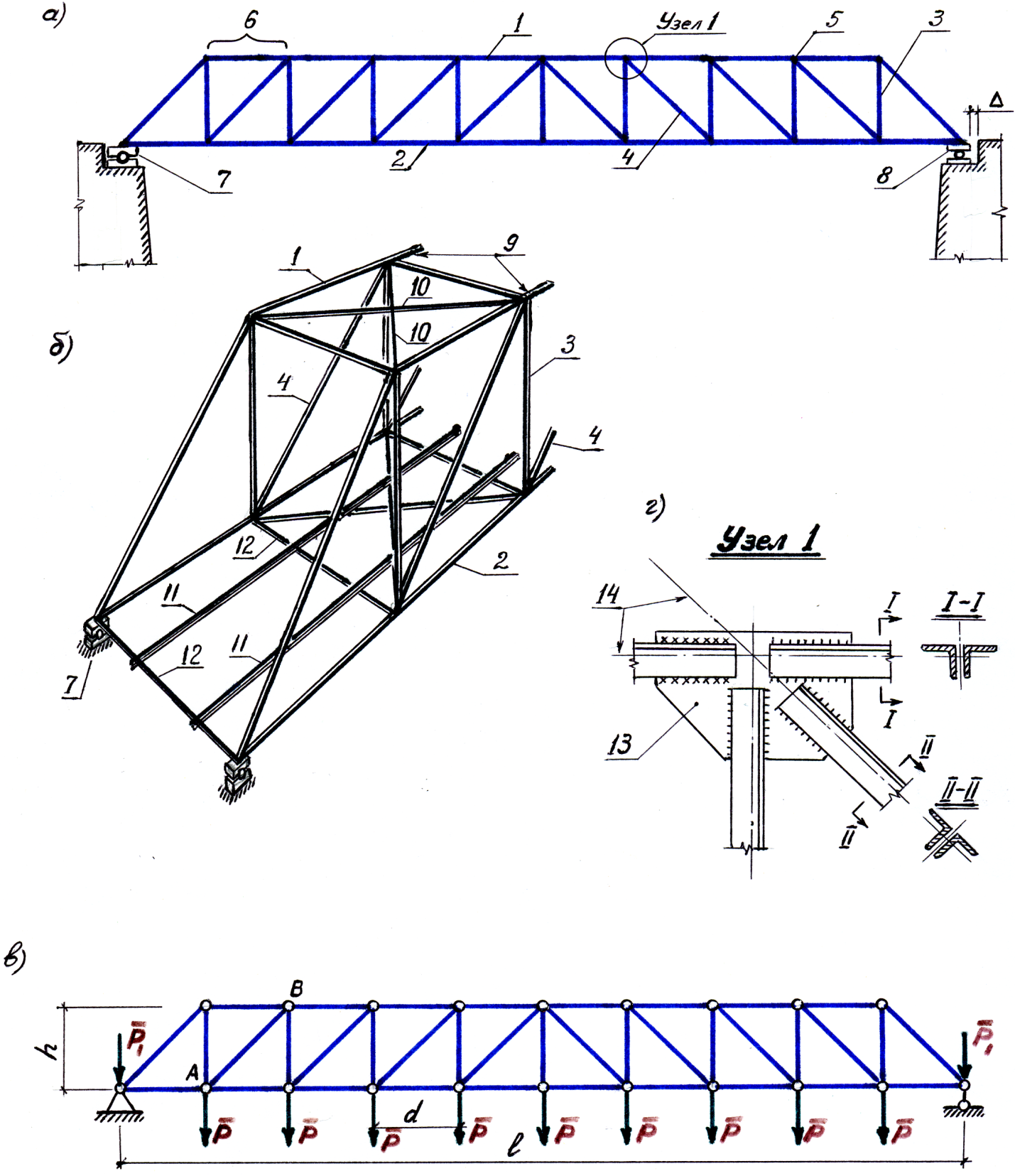
Рис.4.3.Мостовая ферма с ездой по низу
4.3.2. РАБОТА ФЕРМ.
Стержни металлических ферм имеют значительные длины, и, как показали расчёты, с достаточной для практики точности их узлы в расчётных схемах можно считать шарнирными (рис. 4.3в).
Пояса фермы работают на сжатие и растяжение и воспринимают изгибающий момент. Решётка служит для связи между поясами и воспринимает поперечную силу. Высота ферм может быть большой. Поэтому фермами можно перекрывать значительно большие пролёты, чем балками.
Покажем, что в стержнях шарнирной фермы при передаче нагрузки в узлах возникают только продольные силы. Выделим из фермы на рис.4.3в произвольный стержень АВ. Обозначим силы, действующие на её концах  Моменты на торцах стержня равны нулю, т.к. узлы шарнирные (рис.4.4а). Разложим силы на две составляющие: в проекции на ось стержня и в перпендикулярном ей направлении(рис.4.4б).
Моменты на торцах стержня равны нулю, т.к. узлы шарнирные (рис.4.4а). Разложим силы на две составляющие: в проекции на ось стержня и в перпендикулярном ей направлении(рис.4.4б).
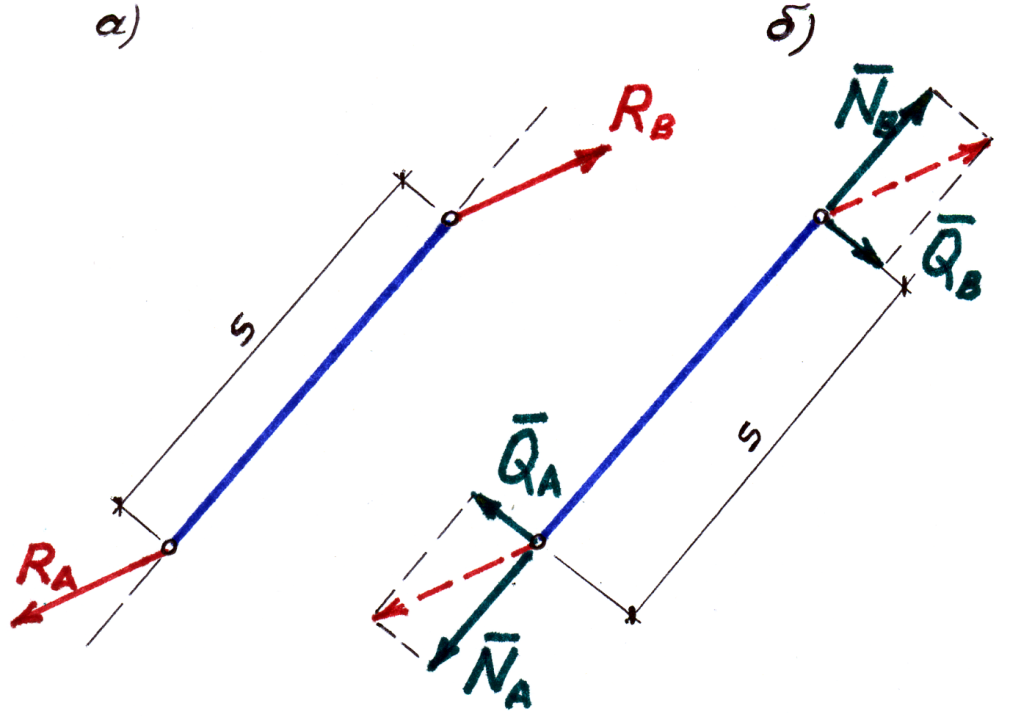
Рис.4.4.
Из моментного уравнения равновесия 
Аналогично: 
Из уравнения равновесия в проекции на ось стержня: 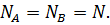 Т.е. в стержнях идеальных ферм возникают только продольные силы. При этом стержни ферм работают либо на растяжение, либо на сжатие.
Т.е. в стержнях идеальных ферм возникают только продольные силы. При этом стержни ферм работают либо на растяжение, либо на сжатие.
Железобетонные фермы имеют массивные поперечные сечения, их узлы нельзя считать шарнирными.
У вертикально стоящих ферм пояса расположены вертикально и являются колоннами, выполняемыми, например, из швеллеров (рис.4.5) или заполняемых бетоном труб. Соединённые между собой решёткой и жёсткими дисками перекрытий, они служат каркасом в небоскрёбах (в США, Японии, Китае и др. странах), стволами башен радиотелевизионных передающих станций (рис.4.6), сотовой связи, мачт, каркасами монументов, памятников и т.д.

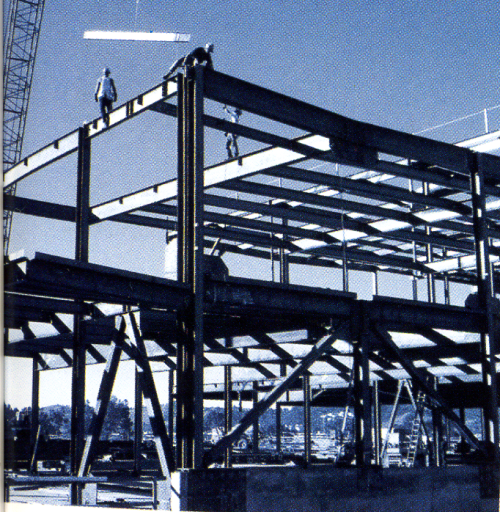
Рис.4.5.
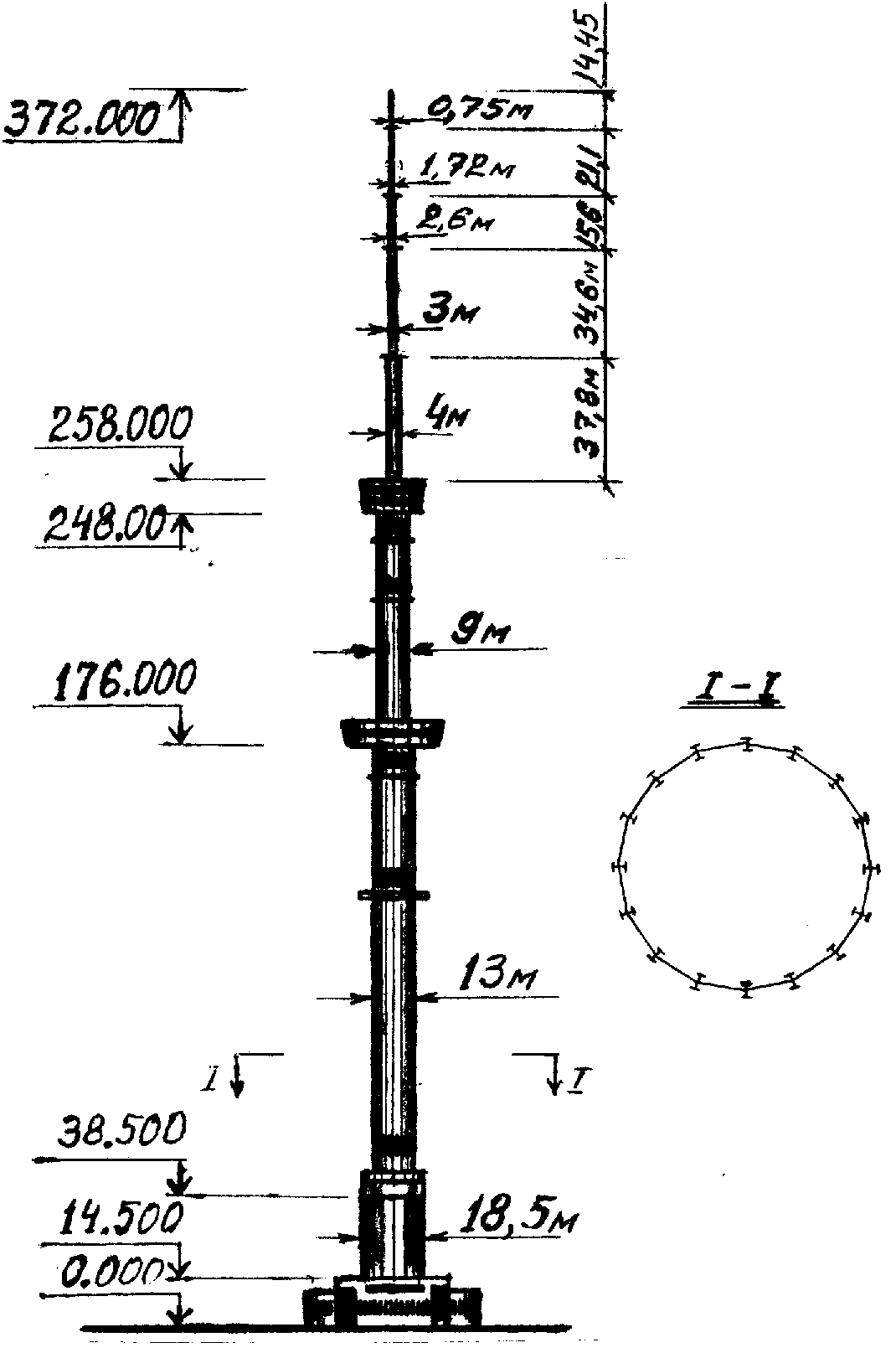
Рис.4.6. РТПС в Алма-Ате.
В жилых, общественных, производственных зданиях все металлические поверхности должны быть защищены не только от коррозии, но и от огня на случай пожара.
5. АНАЛИТИЧЕСКИЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ УСИЛИЙ В ПЛОСКИХ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ ФЕРМАХ. РЕКОМЕНДАЦИИ ПО КОНСТРУИРОВАНИЮ.
5.1 МЕТОД ВЫРЕЗАНИЯ УЗЛОВ
Рассмотрим на примере треугольной фермы, показанной на рис. 5.1
P=4000кH, α= 
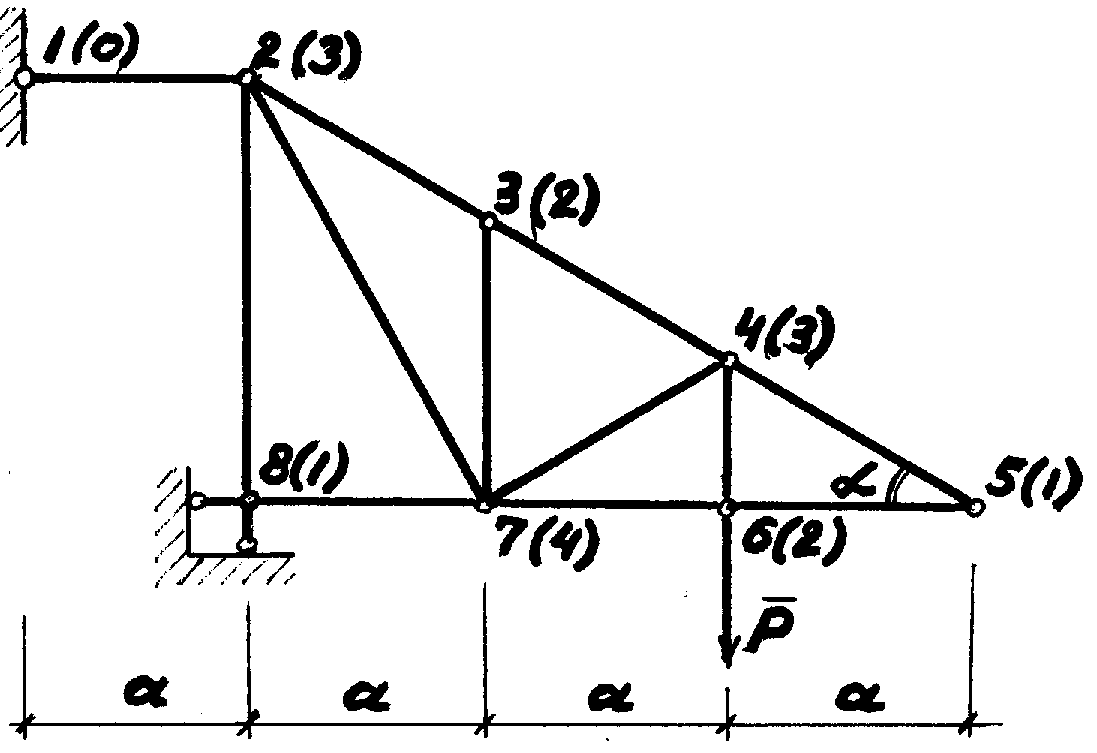
Рис.5.1.
Распределённым весом элементов ферм пренебрегают, их вес сосредотачивают в узлах.
В данном случае мы совсем не будем учитывать собственный вес фермы.
У фермы две шарнирно-неподвижные опоры: 1 и 8
Каждая из них отнимает у соответствующих узлов по две степени свободы.

