 2015-04-30
2015-04-30 2007
2007Подставив в (4.50) значение  , находим выражение для частоты вращения:
, находим выражение для частоты вращения:
 (4.60)
(4.60)
Если в цепь якоря включено Rрег1,то
 (4.61)
(4.61)
Отсюда следует, что частоту вращения двигателей постоянного тока можно регулировать следующими способами:
1. Изменением величины падения напряжения в цепи якоря  ;
;
2. Изменением величины основного магнитного потока Ф;
3. Изменением напряжения U питающей сети.
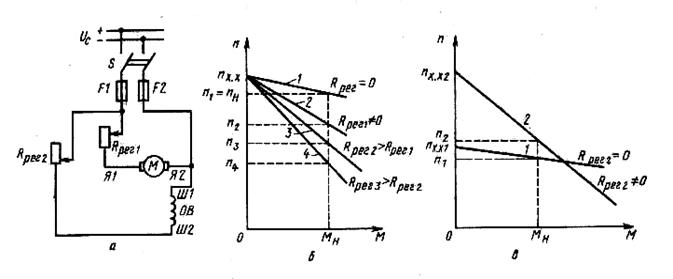
Регулирование частоты вращения изменением величины падения напряжения в цепи якоря (рис. 4.31,а,б)
Рис. 4.31 Регулирование частоты вращения двигателей постоянного тока:
а) электрическая схема;
б) механические характеристики двигателя при изменении сопротивления якоря;
в) механические характеристики двигателя при изменении сопротивления обмотки возбуждения.
Величину  меняют при помощи реостата Rрег1 в цепи якоря.
меняют при помощи реостата Rрег1 в цепи якоря.
При уменьшении сопротивления RРЕГ1 уменьшается падение напряжения  , поэтому увеличивается частота вращения n; так можно регулировать n от 0 до nном, но этот способ не экономичен, так как в реостате значительные потери, и КДП машины уменьшается. Этот способ применяется для двигателей постоянного тока небольшой мощности.
, поэтому увеличивается частота вращения n; так можно регулировать n от 0 до nном, но этот способ не экономичен, так как в реостате значительные потери, и КДП машины уменьшается. Этот способ применяется для двигателей постоянного тока небольшой мощности.
Механические характеристики  двигателей постоянного тока параллельного возбуждения при различных сопротивлениях RРЕГ1 в цепи якоря изображены на рисунке 4.31, б.
двигателей постоянного тока параллельного возбуждения при различных сопротивлениях RРЕГ1 в цепи якоря изображены на рисунке 4.31, б.
Для получения аналитической зависимости между n и М воспользуемся выражением (4.61)
 (4.62)
(4.62)
Из формулы (4.57)  , тогда
, тогда
 (4.63)
(4.63)
 - частота вращения в режиме холостого хода.
- частота вращения в режиме холостого хода.
 - величина, на которую уменьшается частота вращения вследствие увеличения нагрузки на валу двигателя постоянного тока.
- величина, на которую уменьшается частота вращения вследствие увеличения нагрузки на валу двигателя постоянного тока.
Если пренебречь реакцией якоря, то можно считать, что Ф =const, и характеристика - прямая линия (рис.4.31, б)
1- естественная характеристика;
2, 3, 4-искусственные характеристики.
Этот способ позволяет регулировать частоту вращения двигателей постоянного тока от nном и выше.
Регулирование частоты вращения изменением величины магнитного потока Ф (рис. 4.31, а,в)
Магнитный поток машины можно изменять за счет изменения тока в обмотке возбуждения при помощи регулировочного реостата RРЕГ2.
В первый момент при уменьшении магнитного потока Ф  частота вращения n останется почти постоянной вследствие инерции вращающихся масс; тогда ЭДС
частота вращения n останется почти постоянной вследствие инерции вращающихся масс; тогда ЭДС  уменьшается, а ток якоря
уменьшается, а ток якоря  возрастает, причем небольшое уменьшение ЭДС вызывает относительно большое увеличение тока якоря. Поэтому, несмотря на уменьшение магнитного потока Ф, момент на валу М увеличивается, следовательно, увеличивается частота вращения n, а значит, и ЭДС Е. Тогда ток якоря Iа уменьшается, и уменьшается момент М. Затем устанавливается равновесный режим:
возрастает, причем небольшое уменьшение ЭДС вызывает относительно большое увеличение тока якоря. Поэтому, несмотря на уменьшение магнитного потока Ф, момент на валу М увеличивается, следовательно, увеличивается частота вращения n, а значит, и ЭДС Е. Тогда ток якоря Iа уменьшается, и уменьшается момент М. Затем устанавливается равновесный режим:  .
.
Этот способ позволяет регулировать частоты вращения двигателя постоянного тока  от
от  и выше.
и выше.
На рис. 4.31, в представлены механические характеристики двигателя постоянного тока параллельного возбуждения при различных значениях магнитного потока Ф.
При RРЕГ2 =0 характеристика естественная (рис. 4.31, в, прямая 1) При увеличении сопротивления RРЕГ2 (рис. 4.31, а) уменьшается магнитный поток Ф, увеличиваются nХХ, Δn, и угол наклона механической характеристики к оси абсцисс возрастает (рис. 4.31, в, прямая 2).
Регулирование частоты вращения изменением величины напряжения U питающей сети (рис. 4.32)
Для изменения n изменением U применяется питание ДПТ от специального генератора (рис.4.32, а).
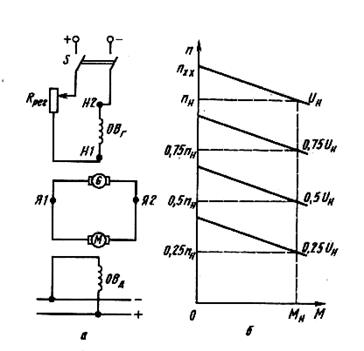 |
Рис. 4.32 Регулирование частоты вращения двигателей постоянного тока при изменении напряжения питающей сети:
а) электрическая схема;
б) механические характеристики
Так как частота вращения n пропорциональна питающему напряжению U (4.62), то при изменении напряжения механические характеристики не меняют своего угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (рис. 4.32, б).
Если изменять напряжение сети в широких пределах, то и частота будет меняться в широких пределах.
Для изменения направления вращения двигателя (реверсирования) необходимо изменить направление тока или в обмотке возбуждения, или в в обмотке якоря – для двигателей постоянного тока параллельного возбуждения; в двигателях постоянного тока смешанного возбуждения – в обеих обмотках возбуждения.

