 2015-04-23
2015-04-23 1704
1704Пусть uвх(t) – некоторый входной сигнал, в общем случае не совпадающий с сигналом sвх(t), по отношению к которому рассматриваемый линейный фильтр является согласованным. Отклик фильтра на данное входное воздействие (интегрирование при этом проводится в пределах ]-∞; ∞[:
uвых = ∫ uвх(τ) hсогл(t - τ) dτ = k ∫ uвх(τ) sвх[t0 - (t - τ)] dτ = k ∫ uвх(τ) sвх[τ - (t - t0)] dτ. (24)
Интеграл представляет собой взаимокорреляционную функцию сигналов uвх(t) и sвх(t):
uвых (t) = k Bus(t – t0). (25)
В момент времени t0 мгновенное значение выходного сигнала с точностью до коэффициента пропорциональности оказывается равным скалярному произведению обоих сигналов:
uвых(t0) = k ∫ uвх(τ) sвх(τ)dτ. (26)
Предположим, что на входе фильтра uвх(t) = sвх(t), т.е. присутствует сигнал, по отношению к которому этот фильтр согласован. Из формулы (25) следует, что в этом случае
sвых (t) = k Bs(t – t0), (27)
т.е. выходной сигнал пропорционален автокорреляционной функции входного сигнала, сдвинутой во времени на отрезок t0. На рис. 9.7 изображено построение сигнала на выходе конкретного согласованного фильтра.
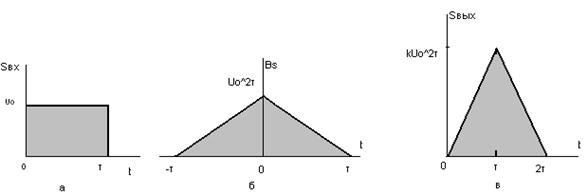
Рис. 9.7 – Построение сигнала на выходе фильтра, согласованного с прямоугольным видеоимпульсом: а – сигнал на входе; б – его автокорреляционная функция; в – сигнал на выходе для случая, когда максимум выходного колебания достигается в момент окончания импульса на входе.

