 2015-04-30
2015-04-30 1674
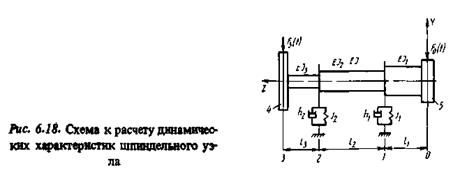
1674В ряде случаев динамическое качество станка определяется в основном динамическими характеристиками шпиндельного узла. Для расчета шпиндельных узлов с несколькими опорами или несколькими подшипниками в одной опоре (статически неопределимой) наиболее подходит метод начальных параметров в матричной формулировке, называемый методом переходных матриц или методом продолжения [35, 51, 58]. Целью расчета является определение амплитуд установившихся: колебаний шпинделя на его переднем конце при условии, что в процессе резания со стороны привода на шпиндель действуют гармонические возмущающие силы.
Шпиндель представляют как балку ступенчато-переменного сечения на линейно-упругих опорах с вязким демпфированием, пропорциональным скорости колебаний. Балку разбивают на участки. Их границами считают сечения, в которых изменяется момент инерции поперечного сечения шпинделя или расположена опора, находится сосредоточенная масса (патрон, шкив, зубчатое колесо), действует внешняя сосредоточенная нагрузка (сила, изгибающий момент), имеет место скачкообразное изменение распределенной нагрузки.
На рис. 6.18 представлена схема шпиндельного узла с разбиением шпинделя на три участка длиной 11,12 и I3,ограниченные сечениями0,1,2 и3.На заднем и переднем концах расположены сосредоточенные массы: шкив ременной передачи 4 (или зубчатое колесо) и патрон 5. В процессе резания на шпиндель действуют возмущающая гармоническая сила F0 (t) и гармоническая сила F3 (t) со стороны привода, являющиеся функциями времени t.
Для q- го сечения вводим следующие обозначения:  амплитуда перемещений;
амплитуда перемещений;  угол поворота сечения;
угол поворота сечения;  изгибающий момент;
изгибающий момент;  — поперечная сила для q-гo участка; т — распределенная масса (масса единицы длины);
— поперечная сила для q-гo участка; т — распределенная масса (масса единицы длины);  момент инерции сечения; Е - модуль упругости материала;
момент инерции сечения; Е - модуль упругости материала;  изгибная жесткость. Буквами j и h обозначаем радиальную жесткость и коэффициент демпфирования опор.
изгибная жесткость. Буквами j и h обозначаем радиальную жесткость и коэффициент демпфирования опор.
Дифференциальное уравнение свободных колебаний ^-го участка шпинделя:

где  коэффициент демпфирования, учитывающий рассеяние энергии колебаний в материале шпинделя;
коэффициент демпфирования, учитывающий рассеяние энергии колебаний в материале шпинделя;  мнимая единица;
мнимая единица;  координата вдоль оси шпинделя.
координата вдоль оси шпинделя.
Если решение искать в виде
где  круговая частота колебаний; У(z) — функция формы колебаний, то уравнение формы колебаний приобретает вид
круговая частота колебаний; У(z) — функция формы колебаний, то уравнение формы колебаний приобретает вид
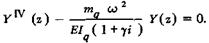 (6.4)
(6.4)
В общем случае приложения внешней нагрузки рассматриваемый шпиндельный узел описывается следующим дифференциальным уравнением:
 (6.5)
(6.5)
где  и
и  векторы параметров на свободных концах шпинделя (в сечениях с номерами Q_ и и);
векторы параметров на свободных концах шпинделя (в сечениях с номерами Q_ и и);
 матрица (4x4), равная произведению всех
матрица (4x4), равная произведению всех
матриц перехода;
 — матрица (4x4), равная произведению матриц перехода, соответствующих участкам шпинделя, расположенным левее сечения N, где приложена внешняя нагрузка;
— матрица (4x4), равная произведению матриц перехода, соответствующих участкам шпинделя, расположенным левее сечения N, где приложена внешняя нагрузка;
YN — вектор параметров в сечении N.
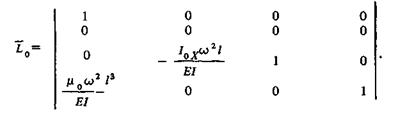
Векторы параметров на свободных концах рассматриваемого шпинделя длиной l без учета свободной нагрузки
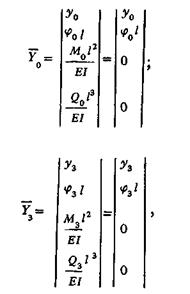
где через EI обозначена изгибная жесткость участка наибольшей длины, т.е. межопорной части шпинделя: 
С учетом граничных условий из уравнения (6.5) находим прогиб у и угол наклона y 0 в начальном сечении. С использованием переходных матриц сечений и участков шпинделя методом обратной прогонки определим прогиб и угол поворота в любом сечении.
Переходные матрицы рассмотрим более подробно. Патрон, находящийся на переднем конце шпинделя, т.е. в нулевом сечении, представим в виде груза, имеющего сосредоточенную массу  и момент инерции
и момент инерции  относительно оси X. Амплитудные значения его колебаний равны
относительно оси X. Амплитудные значения его колебаний равны  и
и  При переходе через нулевое сечение параметры матрицы
При переходе через нулевое сечение параметры матрицы  преобразуются с помощью матрицы сосредоточенной массы
преобразуются с помощью матрицы сосредоточенной массы
Параметры на концах первого участка связаны матрицей перехода через участок
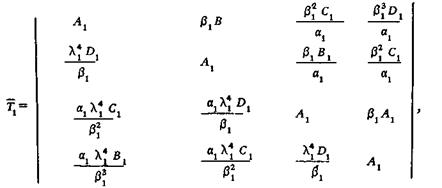
получаемой в результате решения дифференциального уравнения (6.4). Здесь Ах, Вх, Сг, Dx — функции, которые могут быть представлены в виде степенных рядов;

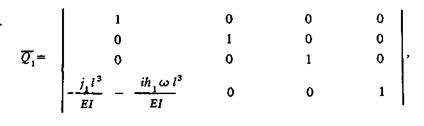
Скачок поперечной силы при переходе через опору 1, равный ее реакции с учетом упругой и диссипативной составляющих, описывается матрицей опоры
Аналогично записываются остальные переходные матрицы:  сосредоточенной массы в третьем сечении;
сосредоточенной массы в третьем сечении;  и
и  — второго и третьего участков;
— второго и третьего участков;  второй опоры. Переход от правого (нулевого) сечения шпинделя к левому описывается переходной матрицей, равной произведению всех переходных матриц:
второй опоры. Переход от правого (нулевого) сечения шпинделя к левому описывается переходной матрицей, равной произведению всех переходных матриц:

В результате перехода получаем матричное уравнение
 (6.6)
(6.6)
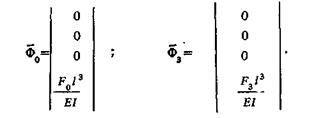
пригодное при отсутствии внешней нагрузки на шпиндель. Из этого уравнения определяют собственные частоты колебаний шпинделя. При этом сначала находят детерминант уравнения, являющийся функцией круговой частоты со, а затем ряд собственных частот, при которых детерминант обращается в ноль. С учетом внешней нагрузки в первом и третьем сечениях уравнение (6.6) для рассматриваемого шпинделя приобретает вид
 (6.7)
(6.7)
где
Из уравнения (6.7) определяют частотные передаточные функции системы  по воздействию со стороны процесса резания (при F3 = 0), системы
по воздействию со стороны процесса резания (при F3 = 0), системы  по воздействию со стороны привода (при F = 0), а также амплитудно-фазовую частотную характеристику системы шпиндельного узла
по воздействию со стороны привода (при F = 0), а также амплитудно-фазовую частотную характеристику системы шпиндельного узла 
По результатам анализа динамических характеристик производят оптимизацию параметров шпиндельного узла. Для этого разработан комплекс программ расчета этих характеристик на ЭВМ в пакетном и диалоговом режимах.








