 2015-05-12
2015-05-12 1983
1983Под режимом горизонтального полета понимается установившееся прямолинейное движение вертолета с постоянной скоростью без набора высоты и снижения.
Для перевода вертолета из набора высоты в горизонтальный полет необходимо, не меняя режима работы двигателей, отклонением ручки управления от себя установить заданную скорость, а затем рычагом ШАГ-ГАЗ подобрать режим работы двигателей, соответствующий заданной скорости горизонтального полета. Частота вращения несущего винта при этом автоматически поддерживается в пределах 95 ±1%. После перевода вертолета в режим горизонтального полета появляющиеся усилия на ручке управления снять триммерами.
О правильности подбора режима работы двигателей для горизон-тального полета на заданных скорости и высоте полета можно судить по показаниям указателя скорости и вариометра. Если при заданной скорости полета стрелка вариометра находится около нулевого положения, режим работы двигателей подобран правильно. Если же при заданной скорости полета стрелка вариометра показывает спуск, то летчик должен рычагом ШАГ-ГАЗ несколько увеличить мощность двигателей, а отклонением ручки управления на себя увеличить угол тангажа. Когда при заданной скорости полета вариометр показывает подъем рычагами управления, следует действовать в обратном порядке.
После того как будет подобран режим работы двигателей рекомендуется запомнить положение остекления кабины относительно линии естественного горизонта и сохранять его соответствующими отклонениями рычагов управления, периодически контролируя режим полета по авиагоризонту, вариометру и указателю скорости. Это облегчит пилотирование вертолета в визуальном полете.
Горизонтальный полет вертолета в зависимости от высоты полета разрешается производить при взлетной массе 13000 и 11 100 кг (для Ми-8Т при взлетной массе 12000 и 11000 кг) в диапазоне скоростей по прибору, указанных в табл. 1.
На рис. 15 показана схема сил, действующих на вертолета горизонтальном полете.
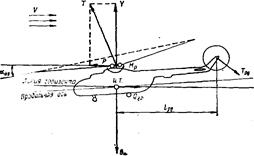
Рис. 15. Схема сил, действующих на вертолет в горизонтальном полете
Сила тяжести вертолета G в горизонтальном полете должна быть уравновешена вертикальной составляющей Y тяги несущего винта. Этим обеспечивается сохранение постоянства высоты полета. Чтобы скорость полета была постоянной, сила вредного сопротивления Qвр должна быть равной горизонтальной составляющей Р тяги несущего винта. Равенство реактивного момента Мр несущего винта моменту от тяги рулевого винта Трвlрв является условием сохранения прямолинейности полета.
Известно, что с увеличением скорости полета потребная тяга увеличивается. Объясняется это ростом вредного сопротивления вертолета (оно изменяется пропорционально квадрату скорости). Для уравновешивания силы вредного сопротивления потребуется увеличить горизонтальную составляющую тяги несущего винта. А этого можно достигнуть только за счет увеличения общей тяги несущего винта, так как при наклоне ее вперед (для увеличения горизонтальной составляющей) вертикальная составляющая У должна оставаться равной силе тяжести вертолета.
Располагаемая тяга с увеличением скорости полета до экономической вследствие увеличения секундного расхода воздуха, проходящего через несущий винт, растет. При дальнейшем увеличении скорости из-за расширения зоны обратного обтекания и усиливающегося срыва потока воздуха с концов отступающих лопастей несущего винта в азимуте 270° располагаемая тяга падает. В результате этого потребная мощность при увеличении скорости до экономической Vэк будет уменьшаться, а при дальнейшем росте скорости увеличиваться.
График располагаемой и потребной мощностей показаннарис. 16.
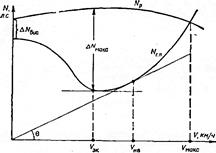
Рис. 16. График располагаемой и потребной мощностей горизонтального полета
Скорость полета, при которой располагаемая мощность Nр равна потребной Nгп (избыток мощности отсутствует), называется максимальной Vмакс. Однако максимальная скорость горизонтального полета, как правило, ограничивается срывом воздушного потока, возникающим на отступающей лопасти несущего винта. Первоначальное возникновение срыва проявляется в сильной тряске всего вертолета. В дальнейшем с увеличением скорости полета зона срыва быстро увеличивается, что приводит к потере управляемости.
Нарушение плавности обтекания лопасти несущего винта воздушным потоком (срыв потока) наступает на определенной скорости полета, при которой вследствие движения лопастей истинные углы атаки лопасти, идущей назад, достигают критического значения. Чем больше величина общего шага винта, тем на меньшей скорости полета возникает срыв потока. С увеличением высоты полета срыв потока наступает раньше, так как из-за уменьшения плотности воздуха для создания той же тяги общий шаг несущего винта необходимо увеличить.
Другой причиной, ограничивающей максимальную скорость полета, является влияние сжимаемости воздуха. При движении по полету каждая лопасть несущего винта в азимуте 90° проходит зону наибольших скоростей обтекания, в которой местная скорость обтекания может превысить скорость звука. При этом возникает скачок уплотнения, приводящий к резкому увеличению силы лобового сопротивления лопастей несущего винта, а следовательно, и потребной мощности. Для снижения влияния сжимаемости воздуха в концевых сечениях лопастей несущего винта, работающих в зоне наибольших скоростей обтекания, установлены скоростные профили с небольшой относительной толщиной.
Для уменьшения вредного сопротивления вертолета ось главного редуктора наклонена вперед от вертикальной оси на угол 4030/. Этим уменьшается наклон продольной оси фюзеляжа на крейсерской и максимальной скоростях полета, а следовательно, уменьшается площадь сечения фюзеляжа, расположенная перпендикулярно к встречному потоку воздуха.
Максимальная скорость горизонтального полета по прибору до высоты 1000 м со взлетной массой 13000 кг (Ми-8Т — 12000 кг) установлена 230 км/ч, для взлетной массы 11 100— 250 км/ч.
Горизонтальный полет в учебных целях (при полетах по кругу и по системе) рекомендуется выполнять на скорости 160 км/ч. Полеты по маршруту, т. е. полеты, в которых требуется достигнуть наибольшую дальность полета, выполняются на скоростях, указанных в табл. 1.
При полете со скоростями меньше указанных в табл. 1 радиус и дальность полета уменьшается, а продолжительность полета увеличивается. Максимальная продолжительность полета получается при скоростях по прибору 120—130 км/ч.
Планирование
Планирование с работающими двигателями является основным видом снижения вертолета. Оно позволяет использовать мощность двигателей для выдерживания вертикальной скорости снижения.
Схема сил, действующих на вертолет при снижении с работающими двигателями, приведена на рис. 17.
В установившемся режиме планирования должны выдерживаться постоянный угол планирования 9, поступательная скорость и курс полета. Для сохранения постоянного угла планирования необходимо, чтобы подъемная сила Y уравновешивала составляющую силы тяжести вертолета G1. направленную перпендикулярно к траектории снижения. Под подъемной силой понимается составляющая тяги несущего винта направленная перпендикулярно к набегающему потоку воздуха
Условием постоянства поступательной скорости будет равенство составляющей силы тяжести вертолета G2 направленной параллельно траектории снижения, сумме сил вредного сопротивления вертолета Qвр и составляющей Р силы тяги несущего винта, направленной параллельно набегающему потоку.
При этом следует иметь в виду, что на скоростях планирования более 60—70 км/ч составляющая Р направлена вперед. В этом случае для сохранения поступательной скорости сумма сил G2 и Р должна быть равна силе Qвр.
Как и на других режимах, равенство реактивного момента несущего винта Мр моменту от тяги рулевого винта Трв/рв будет условием сохранения курса полета.
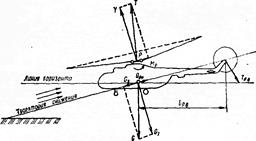
Рис. 17. Схема сил, действующих на вертолет при снижении с работающими двигателями
На рис. 17 видно, что на планировании с работающими двигателями подъемная сила уравновешивает только часть массы вертолета (G1), а другая часть (G2) является силой, которая перемещает вертолет по траектории. Поэтому потребная тяга на планировании меньше, чем в режиме горизонтального полета. Из этого следует, что для перевода вертолета с режима горизонтального полета на планирование необходимо уменьшить тягу несущего винта путем уменьшения его общего шага. От значения общего шага несущего винта при постоянной поступательной скорости будет зависеть величина вертикальной скорости снижения.
Таким образом, на вертолете при одной и той же поступательной скорости можно снижаться с различными вертикальными скоростями, но максимальная вертикальная скорость снижения при планировании с работающими двигателями ограничена.
Рекомендуемая вертикальная скорость снижения на планировании 2—3 м/с.
Поступательная скоростьна планировании зависитот высоты полета. Планирование на вертолете с работающими двигателями разрешается на скоростях, указанных в табл. 1.
В учебных целях при заходе на посадку планирование выполняется на скорости 140—150 км/ч с вертикальной скоростью снижения 2—3 м/с.
При переходе с режима горизонтального полета на планирование с работающими двигателями следует уменьшить общий шаг несущего винта и ручкой управления установить заданную скорость планирования. Необходимо учитывать, что с уменьшением общего шага уменьшается реактивный момент несущего винта. Поэтому вместе с отклонением рычага ШАГ-ГАЗ вниз для предотвращения разворота вертолета вправо нужно на небольшую величину отклонить левую педаль. Это вызовет уменьшение тяги рулевого винта, и у вертолета появится тенденция к накренению вправо. Поэтому одновременно с отклонением левой педали необходимо отклонить ручку управления влево.
Заданную скорость полета и вертикальную скорость снижения можно уточнять плавными отклонениями ручки управления и рычага ШАГ-ГАЗ. Вначале при постоянном значении общего шага несущего винта отклонениями ручки управления в продольном направлении устанавливается заданная поступательная скорость. Если вертикальная скорость окажется меньше или больше заданной, рекомендуется соответственно уменьшить или увеличить общий шаг несущего винта.
Установившийся режим планирования, особенно при длительном снижении, легче выдерживать по положению деталей остекления кабины относительно линии естественного горизонта.
С изменением центровки вертолета, а также при изменении поступательной скорости положение деталей остекления кабины относительно линии горизонта будет изменяться. Поэтому в каждом отдельном случае после перевода вертолета на планирование и установления заданного режима рекомендуется запомнить фактическое положение деталей остекления кабины относительно линии естественного горизонта и выдерживать его соответствующими отклонениями рычагов управления, периодически контролируя сохранение заданного режима по авиагоризонту, указателю скорости и вариометру.
Для перехода с режима планирования к режиму горизонтального полета надо увеличить общий шаг несущего винта до необходимого значения, удерживая при этом вертолет отклонением правой педали от разворота влево, а отклонением ручки управления установить заданную скорость.

