 2015-05-12
2015-05-12 666
666Область изменения параметров:
· среды (в том числе и частотный диапазон воздействий) и
· замкнутой системы, (далее для краткости — объект: где различие между ними существенно, оговорим особо)
ð в которой замкнутая система устойчива в смысле предсказуемости поведения,
— ОБЛАСТЬ ПОТЕНЦИАЛЬНО УСТОЙЧИВОГО УПРАВЛЕНИЯ. Выход из неё ведёт К ПОТЕРЕ УПРАВЛЕНИЯпо непредсказуемости поведения (рис. 80).
Примером такого рода является гибель Героя Советского Союза лётчика-испытателя Г.Я.Бахчиванджи на первом советском реактивном перехватчике БИ-1 в 1943 г. в результате изменения аэродинамических характеристик самолёта в полёте на большой скорости, которое не выявили своевременно при испытаниях в аэродинамических трубах в ходе проектирования машины.
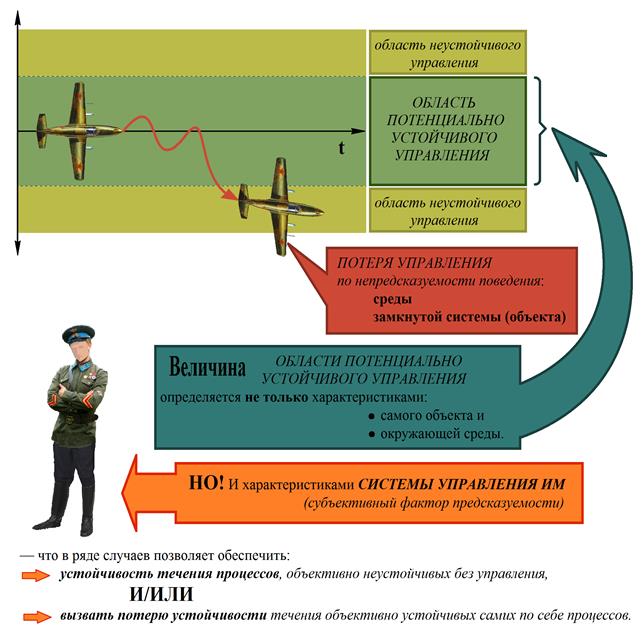
Рис. 80
В последнем случае объективная устойчивость и неустойчивость понимается в обычном смысле убывания отклонения возмущенного движения с течением времени после снятия действия возмущающего фактора.
Область потенциально устойчивого управления определяется в зависимости от привлекаемых к рассмотрению параметров.
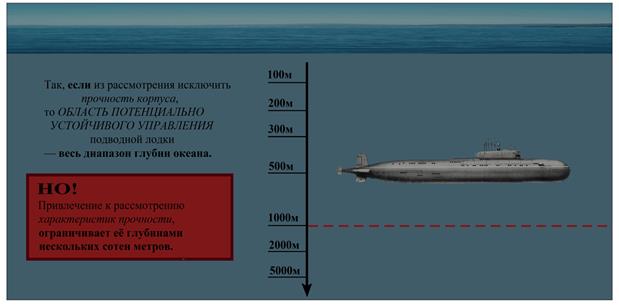
Рис. 81
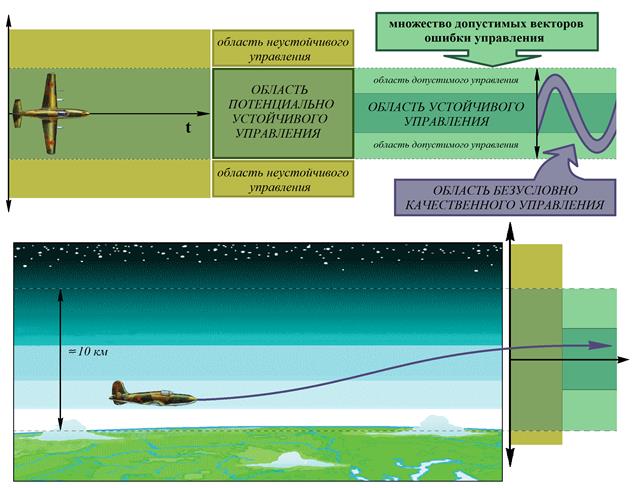
Рис. 82
Внутри области потенциально устойчивого управления лежит ОБЛАСТЬ УСТОЙЧИВОГО УПРАВЛЕНИЯ (в обычном смысле), ограниченная множеством допустимых векторов ошибки управления, — ОБЛАСТЬ ДОПУСТИМОГО УПРАВЛЕНИЯ (рис. 82).
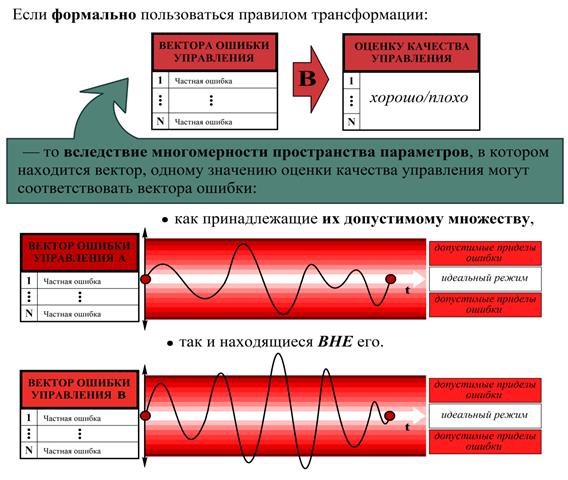
Рис. 83
Поэтому внутри области потенциально устойчивого и допустимого управления можно выделить область, в которой использование принятого правила оценки качества управления не приводит к выходу за пределы области допустимого управления. Это ОБЛАСТЬ БЕЗУСЛОВНО КАЧЕСТВЕННОГО УПРАВЛЕНИЯ (рис. 82).
Пример, иллюстрирующий соотношение границ областей. В прямоугольное отверстие на плоскости необходимо ввести манипулятор. Область потенциально устойчивого управления — часть пространства, в котором находится поверхность с отверстием в пределах досягаемости манипулятора. Зона допустимого управления — само прямоугольное отверстие. Вектор целей — радиус-вектор центра отверстия в избранной системе координат. Если оценка качества управления — расстояние от центра отверстия до внешней поверхности «руки» манипулятора, то зона безусловно качественного управления — круг, вписанный в прямоугольник.
Область — кольцо между вписанным и описанным кругами — зона, где при одной и той же формальной оценке качества, управление может быть:
· допустимым и
· недопустимым.
Полное совмещение зон безусловно качественного и допустимого управления требует построения иного правила преобразования векторов ошибки в оценку качества управления. Поэтому, если обеспечивается устойчивое, безусловно качественное управление, то потеря управления в результате возмущающих воздействий — это последовательный переход из зоны безусловно качественного управления в зону допустимого управления и из неё в зону потенциально устойчивого управления и выход их неё.
Вектор ошибки управления возникает в результате двух причин:
ð во-первых, сама устойчиво функционирующая замкнутая система представляет собой колебательную систему, поэтому даже в условиях заведомого отсутствия внешних возмущений она совершает колебания относительно вектора целей. Вопрос только в том, позволяет ли постановка задачи управления пренебречь этими колебаниями, либо же нет.
ð во-вторых, на замкнутую систему действуют внешние возмущения из окружающей среды, а в ней самой могут происходить какие-то внутренние изменения.
Например самолёт расходует топливо в полёте, в результате чего алгоритмика управления им, применяемая при полных баках, будет ошибочной, если её применить при управлении, когда на борту останется минимальный запас топлива. Этот эффект становится ещё более ярко выраженным, если самолёт в полёте сбрасывает груз (большой по отношению к его максимальной взлётной массе) — это касается бомбардировщиков, ракетоносцев, танкеров-заправщиков, пожарных.
Есть понятие «запас устойчивости замкнутой системы», это — собственная характеристика замкнутой системы, построенная на основе какой-либо (их может быть несколько) меры возмущающего воздействия, — превышение которой ведёт:
ð к выходу вектора ошибки управления за допустимые пределы
ИЛИ
ð к гибели системы.








