 2015-05-12
2015-05-12 912
912принципы сопоставления
и выявления подобия
Теперь вернёмся к замкнутым системам. Устойчиво управляемая система может находиться либо в балансировочном режиме, либо в режиме манёвра.
Один и тот же, реально протекающий режим может быть интерпретирован:
· и как балансировочный, если соотноситься с одним вектором целей,
· и как режим манёвра, если соотноситься с другим вектором целей.
В векторе целей балансировочного режима контрольные параметры неизменны во времени. В реальном устойчивом балансировочном режиме вектор состояния колеблется относительно неизменного положения в подпространстве контрольных параметров, а свободные параметры могут при этом изменяться по-всякому (рис. 113).
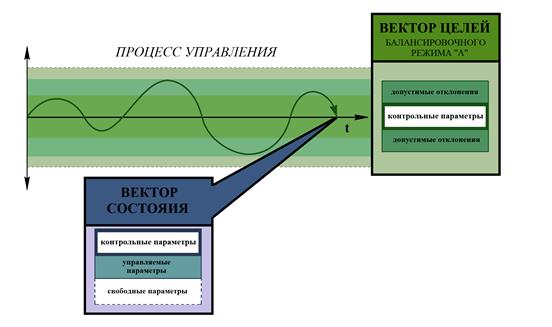
Рис. 113
Понятие «балансировочный режим» несколько сродни понятию «равновесие», но шире его, поскольку обыденное сознание воспринимает «равновесие» статично — как неподвижную неизменность во времени. В балансировочном же режиме во времени неизменен процесс колебаний системы относительно точки «равновесия», координаты которой неизменны во времени: система проходит через неё, но не может пребывать в ней, хотя бы потому, что отклонения от неё — ниже порога чувствительности средств измерения или управление негибко, обладает конечным быстродействием и не может вовремя остановиться. Последнее поясним.
Ø Понятие об отрицательных обратных связях отражает факт построения системы управления объектом таким образом, что обнаружение системой управления отклонений объекта от идеального режима, предписанного вектором целей, вызывает появление управляющего воздействия, направленного в сторону возвращения объекта к идеальному режиму.
Ø При положительных обратных связях управление помогает возмущению с момента его возникновения увести объект от идеального режима в направлении воздействия на объект возмущения.
Если идеальный режим — неизменность во времени вектора целей, в который собраны контрольные параметры, — то по причине конечного быстродействия системы управления её воздействие, компенсирующее отклонение от идеального режима (при отрицательных обратных связях), с какого-то момента времени само становится возмущающим и объект проходит точку идеала.
Этого пересечения значений идеала можно избежать, если задать такое требование при создании системы управления, но и в этом случае колебательный характер балансировочного режима сохранится. Однако колебания будут протекать в некоторой полосе значений по одну сторону от предписанных идеальных значений балансировочного режима.
Так система управления сама раскачивает объект относительного идеального режима вектора целей (вопрос только в том, амплитуды колебаний лежат в допустимых пределах либо же нет). Лучше всего это видно в устойчивых балансировочных режимах.
В неустойчивых балансировочных режимах амплитуда колебаний:
o либо выше допустимой,
o либо нарастает от колебаний к колебанию даже при отрицательных обратных связях.
Т.е. сам принцип отрицательных обратных связей по контрольным параметрам в теории и практике управления необходим, но всё же он — одна из частностей в теории и практике управления в целом.
В векторе целей режима манёвра изменяется хотя бы один из контрольных параметров (рис. 114). При рассмотрении реального процесса устойчивого манёвра в подпространстве контрольных параметров вектор состояния отслеживает с некоторой ошибкой управления изменение вектора целей (содержащего только контрольные параметры). На свободные параметры, как и в случае балансировочного режима, ограничения не накладываются.
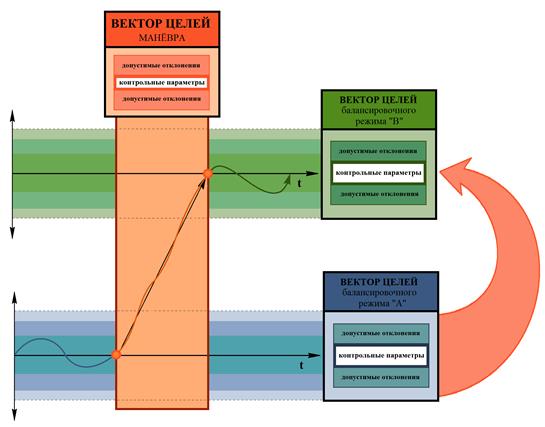
Рис. 114
Режим маневрирования, в котором производные по времени контрольных изменяющихся параметров постоянны (в пределах допустимой ошибки управления), называется установившимся манёвром.
Ø Установившийся манёвр сам является балансировочным режимом, из вектора целей которого исключены изменяющиеся в процессе манёвра контрольные параметры (рис. 115).
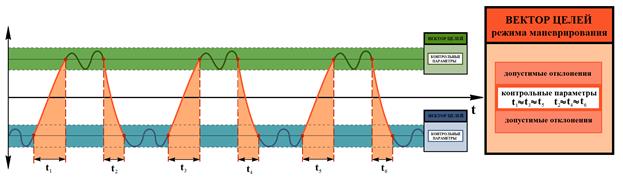
Рис. 115
Если идти от реально протекающего процесса управления и строить по предположению (т.е. гипотетически) вектор целей субъекта, реально управляющего процессом (это называется «идентификация» вектора целей), то один и тот же режим можно интерпретировать в качестве:
· балансировочного режима
ИЛИ
· устойчивого колебательного манёвра.
Ø Так, при отнесении к вектору целей только параметров, колеблющихся относительно средних значений (в зависимости от ограничений на ошибки управления), режим интерпретируется как балансировочный режим;
Ø при отнесении к вектору целей хотя бы одного из произвольно меняющихся параметров, режим интерпретируется как манёвр.
Точно также один и тот же режим можно воспринимать как:
· устойчивый, исходя из одних ограничений на вектор ошибки;
и как
· неустойчивый, исходя из более строгих ограничений на вектор ошибки;
В этом предложении хорошо видно проявление возможности двоякого понимания устойчивости: по ограниченности и убыванию отклонений и по предсказуемости.
Простейший пример балансировочного режима — езда на автомобиле по прямой дороге с постоянной скоростью. Все стрелочки на приборной панели, кроме расхода бензина, подрагивают около установившихся положений; но рулём всё же «шевелить» надо, поскольку неровности дороги, боковой ветер, разное давление в шинах, люфты в подвесках и рулевом приводе норовят увести автомобиль в сторону.
Манёвры в свою очередь разделяются на слабые и сильные. Это разделение не отражает эффективности манёвра. Понятие слабого манёвра связано с балансировочными режимами. Перевод системы из одного балансировочного режима в другой балансировочный режим — это один из видов манёвра. Некоторые замкнутые системы обладают таким свойством, что, если этот перевод осуществлять достаточно медленно, то вектор состояния системы в процессе манёвра не будет сильно отличаться от вектора состояния в исходном и (или) конечном балансировочном режиме за исключением изменяющихся в ходе манёвра контрольных параметров и некоторых свободных параметров, информационно связанных с контрольными.
Если на корабле положить руль на борт на 3 — 4 градуса, то корабль начнёт описывать круг очень большого диаметра и будет происходить изменение угла курса. Если это делается вне видимости берегов и в пасмурную погоду, то большинство пассажиров даже не заметят манёвра изменения курса.
Если же на полном ходу быстроходного корабля (узлов 25 — 30) резко положить руль на борт градусов на 20 — 30, то палуба в процессе перекладки руля дёрнется под ногами в сторону обратную направлению перекладки руля; потом начнётся вполне ощутимое вестибулярным аппаратом человека изменение курса, сопровождающееся вполне видимым креном до 10 и более градусов (рис. 116).
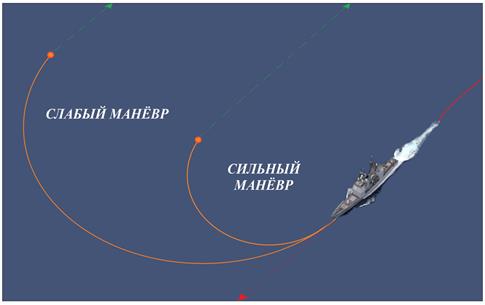
Рис. 116
Хотя в обоих случаях изменение курса может быть одинаковым, гидродинамические характеристики корабля в первом случае слабого манёвра не будут сильно отличаться от режима прямолинейного движения; во втором случае, когда корабль начнёт входить в циркуляцию диаметром не более 4 — 5 длин корпуса, — будет падать скорость хода, появится значительная по величине поперечная составляющая скорости обтекания корпуса и крен, а общая картина обтекания корпуса и гидродинамические характеристики будут качественно отличаться от бывших при прямолинейном движении или слабых манёврах.
Разделение манёвров на сильные и слабые в ряде случаев позволяет существенно упростить моделирование поведения замкнутой системы в процессе слабого маневрирования БЕЗ ПОТЕРИ КАЧЕСТВА результатов моделирования. Поскольку выбор меры качества всегда субъективен, то и разделение манёвров на сильные и слабые определяется субъективизмом в оценке качества моделирования и управления.
Но, если такое разделение возможно, то слабому манёвру можно подыскать аналогичный ему (в ранее указанном смысле) балансировочный режим.
Для физически однокачественных процессов разделение манёвров на сильные и слабые основано на моделировании в безразмерном времени. Поскольку понятие о времени и его измерение связано с выбором эталонной частоты, то в качестве эталонных частот могут быть взяты и собственные частоты колебаний объектов управления, замкнутых систем, процессов взаимодействия замкнутых систем и окружающей среды. Это приводит к понятию динамических подобных (частично или полностью) объектов, систем и процессов, для которых процессы (балансировочные режимы и манёвры), отнесённые ко времени, основанном на сходственных собственных частотах, в некотором смысле идентичны. Подробно это рассматривает ТЕОРИЯ ПОДОБИЯ, являющаяся разделом многих частных отраслей знания. Сопровождение слова «идентичность» эпитетом «некоторая» обусловлено тем, что подобие может осуществляться на разных физических носителях информационных процессов (управления), на разных уподоблениях друг другу параметров подобных систем.
Уподобление — обезразмеривание, т.е. лишение реальных физических и информационных параметров их размерности (метров, килограммов, секунд и т.п.) отнесением их к каким-либо значениям характеристик замкнутой системы и среды, обладающим той же размерностью (метрами, килограммами, секундами и т.п.).
В результате появляются безразмерные единицы измерения сходственных в некотором смысле параметров у сопоставляемых объектов, одинаково характерные для каждого из них. Это свойство общевселенской меры лежит в основе моделирования на одних физических носителях процессов, реально протекающих на других физических носителях (аналоговые вычислительные машины); и в основе информационного (чисто теоретического) моделирования, в котором важна информационная модель, а её физический носитель интереса вообще не представляет (любой алгоритм, предписывающий последовательность действий независим по существу от его материального носителя: бумага, дискета, древний «Минск-32», IBM-PC или суперкомпьютер, человек).
Анализ течения подобного моделирующего процесса может протекать в более высокочастотном диапазоне, чем течение реального подобного моделируемого процесса: это даёт возможность заглянуть в будущие варианты развития моделируемого процесса, что является основой решения задач управления вообще и задачи о предсказуемости, в частности.
Примеры такого рода моделирования — все аэродинамические и прочностные эксперименты и расчёты в авиации, судостроении и космонавтике.
Моделирование высокочастотного процесса в низкочастотном диапазоне позволяет отследить причинно-следственные связи, которые обычно ускользают от наблюдателя при взгляде на скоротечный реальный процесс.
Примером такого рода является скоростная и сверхскоростная киносъёмка (более 105 кадров в секунду) и замедленная (по сравнению с реальностью) проекция ленты, что позволяет решать многие технические и биологические (медицинские) проблемы.
Понятие сильных и слабых манёвров для подобных объектов и замкнутых систем связано с различением манёвров в безразмерных единицах времени. Подобными могут быть и физически разнокачественные процессы, например, описываемые одной и той же математической моделью.
Ø НО! Для физически однокачественных процессов, отличающихся размерными характеристиками, области реальных параметров сильных и слабых манёвров будут РАЗЛИЧНЫ.
Об этом всегда необходимо помнить имея дело с реальными однокачественными замкнутыми системами, различающимися своими размерными характеристиками.








