 2015-06-10
2015-06-10 3107
31072.1 Литературный обзор по теме курсового проекта.
Под системой управления электроприводом подразумевается комплекс, состоящий из преобразователя электрической энергии (если таковой имеется), аппаратуры управления для коммутации тока в цепи электродвигателя, органа ручного управления или автоматического (программного) контроля, органа скоростного, путевого или иного контроля, а также элементов защиты электрооборудования и механизма, действующих в конечном счете на устройства отключения электропривода.
Все электрические цепи подразделяются на:
1) главные цепи, через которые проходит основной ноток энергии электропривода, а также осуществляется питание грузоподъемных магнитов;
2) цепи возбуждения, через которые проходит ток возбуждения электрических машин постоянного тока, синхронных электрических машин переменного тока или электромагнитов тормозных устройств, а также ток двигателей электрогидравлических толкателей;
3)цепи управления, по которым осуществляется подача команд к коммутационным устройствам главных цепей и цепей возбуждения от органов управления. В цепях управления осуществляется также определенная последовательность выполнения команд и переключений по заранее заданной программе;
4)цепи сигнализации, которые передают оператору, контролирующему устройству информацию о состоянии коммутирующих элементов главных цепей и цепей управления или о значениях конкретных параметров электропривода и механизма.
В крановых электроприводах применяют электромашинные и статические преобразователи электрической энергии. В электромашинных преобразователях две (или более) электрические машины преобразуют электроэнергию, потребляемую от питающей сети, в электроэнергию с регулируемыми параметрами (напряжение, частота, ток). В статических преобразователях преобразование электрической энергии осуществляется путем бесконтактной коммутации цепей постоянного или переменного тока с помощью управляемых и неуправляемых полупроводниковых приборов.
Аппаратура управления электроприводом является, комплексом, включающим контактные и бесконтактные устройства коммутации в цепях электродвигателя, преобразователей энергии и управления, а также элементы защиты электрических цепей.
Всю контактную аппаратуру в крановом электроприводе можно разделить на две группы:
1) управление осуществляется непосредственно оператором или исполнительным механизмом (контроллеры, конечные выключатели)
2) с приводом контактов от электромагнитного устройства (контакторы и реле).
Если контактные коммутационные элементы аппарата с непосредственным ручным приводом предназначаются для коммутации цепей главного тока, то такое устройство называется силовым кулачковым контроллером, а если эти элементы служат для коммутации цепей управления, то такой аппарат называется командоконтроллером. Если контактные коммутационные элементы приводятся в действие через связь с механизмом, то такие аппараты называются конечными или путевыми выключателями.
Последовательность замыкания и размыкания контактов, приводимых в действие от вала с кулачковыми шайбами, в функции угла поворота вала, называется диаграммой включений. Диаграмма включений, изображенная в виде таблицы, называется таблицей включений. Несколько контакторов и реле, а также различные устройства защиты, объединенные в законченное комплектное устройство для управления электроприводом, именуются магнитными контроллерами.
2.2 Формулирование требований к автоматизированному электроприводу.
1. При выключенном электроприводе подъема (на нулевом положении) должен существовать контур динамического торможения, обеспечивающий в случае выхода из строя механического тормоза медленное опускание груза. (Это требование, давно безусловно реализуемое в системах постоянного тока, является перспективным и для систем переменного тока.)
2. На первых положениях подъема двигатель должен развивать такой пусковой момент, чтобы исключалась возможность спуска номинального груза при напряжении питающей сети 90% номинального и в то же время желательная минимальная скорость составляла при наименьшей нагрузке не более 30% номинального значения.
3. При перемещении рукоятки командоконтроллера в направлении снижения скорости последняя не должна повышаться даже кратковременно. Это в первую очередь относится к переключению с первого положения в нулевое, когда запаздывание механического
торможения не должно приводить к повышению малой скорости спуска.
4. Система электрического торможения должна иметь необходимый запас, обеспечивающий надежное замедление груза, равного 125% номинального, при напряжении питающей сети 90% номинального.
5. Движение груза должно происходить только в направлении, устанавливаемом командоаппаратом, да же при неисправностях в схеме. В последнем случае груз может оставаться неподвижным.
6. Скорость перемещения грузов для электропривода переменного тока рекомендуется иметь на 30% выше, чем для электропривода постоянного тока при одинаковых условиях использования механизмов.
7. Положениям малой и посадочной скоростей должны соответствовать скорости, мало изменяющиеся от нагрузки, с тем, чтобы оператор мог, не наблюдая за грузом, обеспечить его безопасную (точную) посадку и подъем.
Выбор системы управления для крановых механизмов осуществляется на основе анализа сравнительных показателей.
Экономическая оценка систем управления должна базироваться на принципе минимальных расходов, связанных с первоначальными затратами, эксплуатационными затратами на ремонт, а также затратами энергии, потребляемой из сети на разгон и торможение крановых механизмов за период эксплуатации до капитального ремонта (10 лет).
Экономическая оценка может быть осуществлена расчетом по определённым формулам.
Выбирается система, обладающая наилучшими экономическими показателями. Если экономические показатели сравниваемых систем близки (расхождение не превышает 15%), то производится дополнительная оценка по массогабаритным показателям и условиям размещения электрооборудования.
Учитывая, что размещение преобразовательных агрегатов или полупроводниковых преобразователей на кранах сопряжено с определенными трудностями, может оказаться необходимым применить систему, не обладающую оптимальными экономическими показателями.
2.3. Проектирование функциональной схемы автоматизированного электропривода.
Для реализации закона y1=const в качестве функциональной схемы возьмём схему преобразователя частоты с асинхронным двигателем, регуляторами напряжения и частоты, задатчиком интенсивности, функциональным преобразователем, датчиком тока и обратной связью по току.
 |
Функциональная схема автоматизированного электропривода
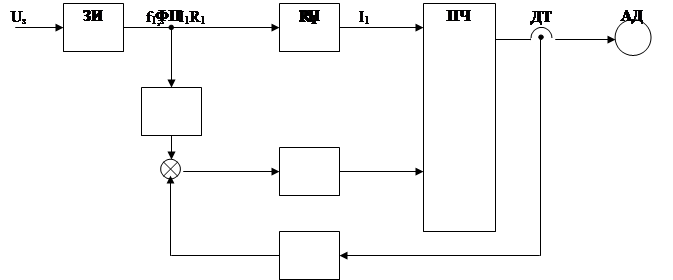
Рис. 2.3
Условные обозначения на схеме:
ЗИ – задатчик интенсивности
РЧ – регулятор частоты
РН – регулятор напряжения
ФП – функциональный преобразователь
ДТ – датчик тока
3. Выбор комплектного преобразователя и датчиков координат электропривода.
По каталогу выбираем преобразователь частоты фирмы Siemens - 11CX4 с габаритами 157´515´238 (16кг) и следующими данными:
- P = 11 кВт
- Iст = 24 А
- Iст.max = 36 А
Степень защищённости и исполнение - IP 21/54.
Выбор датчика тока производим в следующем порядке:
Выбор трансформатора тока
I1ТТн ³ I1н (Iян)
I1ТТн = 25А; I2ТТн = 5А
Выбираем трансформатор типа И512, класс точности 0,05, номинальная вторичная мощность Р2н = 15 ВА
Коэффициент трансформации Ктт = I1ТТн/ I2ТТн = 25/5 = 5
Коэффициент датчика тока Кдт = Rтт/Ктт = 0,6/5 = 0,12
Rтт = Р2н/I2н2 = 15/25 = 0,6
Номинальное значение напряжения датчика тока Uдт=Кдт×Iян=0,12×22,5=2,7В
Максимальное значение Uдтmax = Кдт×Iян×2.5 = 0,12×22,5×2,5 = 6,75В
Так как максимальное значение сигнала датчика тока – 6,75В, то необходимо ввести в схему усилитель. Максимальное значение Uдт должно быть в пределах 8В.
Определим коэффициент усиления:
Ку = 8/6,75 = 1,18
Определим мощность резистора Rтт, исходя из номинального тока вторичной обмотки трансформатора тока:
Ртт = I2TTн×Rтт = 25×0,6 = 15
Выбираем R1 = 10кОм
Ку = R2/R1 = 1,15 Þ R2 = 1,15×10 = 11,5 кОм

