 2015-06-04
2015-06-04 887
887Подключение дополнительных контуров обратной связи в многоконтурных системах обеспечивает повышение качества управления. Наиболее полная информация об управляемом объекте содержится в переменных состояния. Управление по состоянию предусматривает введение в структуру системы контуров прямых и обратных связей по переменным состояния объекта управления. При этом задача стабилизации и слежения формулируется как задача поддержания постоянного X* = const или изменяющегося по заданному закону X* (t) состояния объекта управления X* = X* (t).
Изменяющиеся во времени или фиксированные сигналы xi* , определяющие требуемый характер изменения переменных состояния xi , составляют расширенный вектор задания X* = { xi* }, а ошибка движения объекта управления по состоянию определяется вектором отклонения e = X* - X.
Упраление по состоянию, как и управление по выходу объекта управления, может быть разомкнутым: U = F[X*], замкнутым U = F[e], или комбинированным: U = F[e, X*].
Системы с регуляторами состояния относятся к многоконтурным системам и, следовательно, обладают лучшими точностными и динамическими свойствами, чем одноконтурные. Они проектируются для управления как одномерными, так и многомерными объектами управления.
Проанализируем использование линейных регуляторов состояния для решения задач стабилизации и слежения [15].
Рассмотрим задачу стабилизации объекта управления (ОУ) в точке Y* = 0, полагая, что при этом вектор состояния также принимает нулевое значение: X* = 0 (к такому виду задача почти всегда может быть приведена преобразованием координат векторов X и Y).
Простейший регулятор состояния - пропорциональный или модальный регулятор вводит обратные связи по всем переменным xi (рис. 10.5).
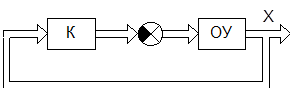
Рис. 10.5. Структурная схема системы с П-регулятором
Модальный регулятор реализует пропорциональный закон управления
U = - K´X, (10.38)
где K - матрица коэффициентов обратной связи по состоянию.
Для одномерного объекта управления в качестве координат xi вектора X можно выбрать, например, фазовые переменные y,  ,..., y(n-1) , то есть
,..., y(n-1) , то есть
X = [ x1 x2 ... xn ]T = [ y ... y(n-1) ]T , (10.39)
где  ; n - порядок системы.
; n - порядок системы.
Тогда K = [ k1 k2 ... kn ]. Выражение (10.38) можно записать в скалярной форме
 . (10.40)
. (10.40)
Первые члены закона управления (10.40) соответствуют описанию ПД-регулятора выхода при y* = 0.
Таким образом, регуляторы состояния являются обобщением ПД-регуляторов, хотя и не содержат в явном виде дифференцирующих звеньев. Выбор коэффициентов k матрицы обратной связи K обеспечивает получение заданных динамических свойств системы.
В условиях действия на объект управления внешних возмущений F точностные показатели качества системы с пропорциональным регулятором состояния ограничены. Снижение установившихся ошибок достигается введением в состав регулятора контуров интегральных обратных связей (рис. 10.6).
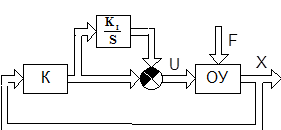
Рис. 10.6. Структурная схема системы с ПИ-регулятором
ПИ-регулятор реализует пропорционально-интегральный закон управления
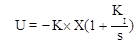 , (10.41)
, (10.41)
где KI - матрица обратных связей по интегралу от вектора состояния.
Комбинированный регулятор позволяет обеспечить компенсацию возмущения за счет прямых связей по возмущающему воздействию F (рис. 10.7).
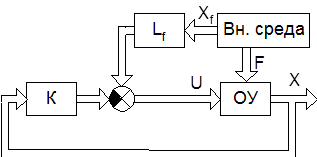
Рис. 10.7. Структурная схема комбинированной системы по возмущающему воздействию
В этом случае закон управления принимает вид
U = - K´X + LF´XF , (10.42)
где LF - матрица коэффициентов контура связей по F;
XF - вектор, составленный из возмущения F и его производных.
Задача слежения рассматривается как задача отработки расширенного вектора задания X* = X* (t). П-регулятор состояния в следящей системе вырабатывает управляющее воздействие, пропорциональное вектору отклонения e = X* - X, то есть реализует закон управления
U = K´e. (10.43)
Для одномерного объекта управления с вектором состояния (10.39) выражение (10.43) можно переписать в скалярной форме
 , (10.44)
, (10.44)
где xi* = (y(i-1))* .
ПИ-регулятор дополняет структуру системы интегральными связями:
 . (10.45)
. (10.45)
Эффективная компенсация ошибок, вызванных возмущающим воздействием F и изменениями задания X* достигается использованием комбинированного управления (рис. 10.8)
U = K´e + LX´X* + LF´XF , (10.46)
где LX - матрица коэффициентов контура прямых связей по X*;
X* - расширенный вектор задания;
LF - матрица коэффициентов контура связей по F;
XF - вектор, составленный из возмущения F и его производных.
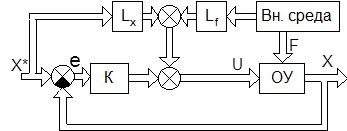
Рис. 10.8. Структурная схема комбинированной системы
Параметры регуляторов (коэффициенты прямых и обратных связей) определяются как функции параметров c математической модели объекта управления. Поэтому при управлении нестационарным объектом возникает необходимость изменения параметров регулятора в процессе работы системы. Задача настройки регулятора осложняется, когда параметры объекта управления неизвестны или неконтролируемо изменяются. Для управления такими объектами используются адаптивные регуляторы, параметры которых настраиваются с помощью блока адаптации (БА, рис. 10.9).
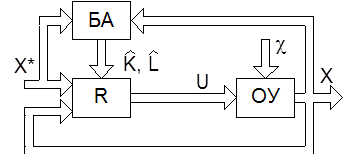
Рис. 10.9. Структурная схема адаптивной системы
Адаптивный регулятор состояния комбинированного типа содержит настраиваемые контуры обратных связей по состоянию X и прямых связей по расширенному вектору задания X*. Закон управления такого регулятора
U =  ´ e +
´ e +  ´ X*, (10.47)
´ X*, (10.47)
где , - матрицы прямых и обратных связей с переменными коэффициентами (параметрами).
Функции блока адаптации заключаются в автоматической настройке параметров регулятора (10.47).
В практике адаптивных систем получили распространение два подхода к настройке параметров.
Первый из них предусматривает включение в состав системы блока идентификатора, осуществляющего вычисление неизвестных параметров объекта управления. Тогда после определения вектора c значения и могут быть найдены по известным, подготовленным заранее, зависимостям
= (c), = (c). (10.48)
Второй подход (безидентификационный) позволяет осуществить настройку контура прямых связей части регулятора (10.47). При этом матрица обратных связей рассчитывается по номинальному значению вектора c и остается неизменной = KO. В качестве источника информации о параметрических ошибках регулятора в блоке адаптации используется сигнал обратной связи по отклонению:
Ue = KO ´ e. (10.49)
Блок адаптации осуществляет изменение параметров регулятора до тех пор, пока в системе не установится нулевое значение сигнала обратной связи Ue и, следовательно, значение e будет равняться нулю.








