 2015-06-04
2015-06-04 20133
20133Параметров, которые бы характеризовали работу таких сложных устройств как АЦП, достаточно много. Особенно их много, если необходимо принимать во внимание, параметры АЦП при их интегральной реализации – к характеристикам АЦП как преобразователей прибавляются характеристики, определяющие их работу как БИС. Большинство параметров последней группы такие как уровни логического нуля и единицы, потребление по входам и нагрузочная способность выходов, потребление, габариты, ударо- и вибропрочность для БИС АЦП определяются также как и любых других БИС. Параметры этой группы мы будем затрагивать только тогда, когда они будут оказывать существенное влияние на основные параметры преобразователей.
АЦП – по своему функциональному назначению это преобразовательное устройство. С этой точки зрения очевидно, что основными его параметрами будут те которые показывают как это преобразование осуществляется. Основные параметры АЦП как преобразовательных устройств можно разделить на две группы – статические и динамические.
Разрядность. Безусловно, тем параметром, на который мы в первую очередь обращаем внимание при выборе готового модуля, БИС АЦП или добиваемся при его проектировании, является его разрядность. Разрядность АЦП это число разрядов его выходного кода.
Погрешность квантования. Одна из наиболее существенных составляющих ошибки при измерениях с помощью АЦП – погрешность квантования – является результатом самого процесса преобразования (кодирования). Погрешность квантования – это погрешность, вызванная значением шага квантования и определяемая как 1/2 величины наименьшего значащего разряда (LSB). Она не может быть исключена в аналого-цифровых преобразованиях, так как является неотъемлемой частью процесса преобразования, определяется разрешающей способностью АЦП и не меняется от АЦП к АЦП с равным разрешением.
Поскольку в процессе квантования отсчеты могут принимать только значения кратные шагу квантования Δ, то при оценке истинного значения выборки неизбежно будет возникать некоторая ошибка q (рис. 4). Очевидно, что величина ошибки равна половине шага квантования и не зависит от уровня квантуемого сигнала. Функцию q(t) принято называть шумом квантования. Шум квантования будет тем ниже, чем меньше шаг квантования или, чем больше число разрядов квантования.
Рис. 4 - Шум квантования
Разрешающая способность. Для того чтобы охарактеризовать точность преобразования кроме кванта (шага) дискретизации h пользуются еще одним понятием. При преобразовании аналого-цифровым преобразователем входного сигнала x(t) в двоичный код максимальному входному сигналу xМАХ(t) соответствует максимальный код NВЫХ МАХ, т. е. сумма весов разрядов этого кода равна диапазону входного напряжения АЦП. При изменении входного сигнала x(t) на квант (шаг) дискретизации h выходной код NВЫХ гарантированно изменится на единицу. Поэтому говорят, что преобразование ведется с точностью до веса младшего разряда выходного кода.
Абсолютные величины, в которых мы пока выражали точность преобразования, не всегда удобны при использовании. Однако можно выразить вес младшего разряда (квант дискретизации), т. е. максимальную погрешность преобразования в процентах от диапазона изменения сигнала и пользоваться для отражения точности преобразования более наглядной оценкой.
Пример. Если мы используем десятиразрядный преобразователь, полной шкале входного сигнала xМАХ(t) будет соответствовать код NВЫХ МАХ = 210 = 1024, а значение кванта h будет равно, соответственно, 1/1024 от шкалы, т. е. примерно 0,1 %. Иными словами, погрешность представления сигнала десятиразрядным двоичным кодом не будет превышать 0,1 % от диапазона входного сигнала. При использовании восьмиразрядного преобразователя максимальная относительная погрешность представления сигнала с помощью двоичного кода будет равна 1/28 = 1/256, т. е. примерно 0,4 %.
Величину, обратную максимальному числу кодовых комбинаций на выходе АЦП называют р азрешающей способностью. Разрешающая способность выражается в процентах, разрядах или децибелах и характеризует потенциальные возможности АЦП с точки зрения достижимой точности.
Конечно, в данном случае мы пока говорим только о методической составляющей погрешности преобразования – ее появление связано с самой методикой (с подходом) формирования цифрового сигнала из непрерывного. При практической реализации АЦП погрешность преобразования им входного сигнала будет включать в себя и другие составляющие, в первую очередь – инструментальные.
Для реальных преобразователей, изготавливаемых в виде интегральных микросхем или модулей, процесс преобразования не является идеальным: на него оказывают влияние как технологический разброс параметров при производстве, паразитные конструктивные параметры, так и различные внешние помехи. Поэтому цифровой код на выходе АЦП определяется с погрешностью. Эти погрешности указываются в спецификации на блок или БИС АЦП. Их обычно делят на статические и динамические. При этом конечное приложение устройства определяет, какие характеристики АЦП будут определяющими, самыми важными в каждом конкретном случае.
Наиболее часто путаемыми параметрами являются разрешающая способность и точность, хотя эти две характеристики реального АЦП крайне слабо связаны между собой. Разрешение не идентично точности, 12-разрядный АЦП может иметь меньшую точность, чем 8-разрядный. Для АЦП разрешение представляет собой меру того, на какое количество сегментов может быть поделен входной диапазон измеряемого аналогового сигнала (например, для 8-разряди о го АЦП это 28 = 256 сегментов). Точность же характеризует суммарное отклонение результата преобразования от своего идеального значения для данного входного напряжения. То есть разрешающая способность характеризует потенциальные возможности АЦП, а совокупность точностных параметров определяет реализуемость такой потенциальной возможности.
Статическая погрешность. Реальные АЦП не имеют идеальной передаточной характеристики. Отклонения от идеальной передаточной характеристики определяют статическую погрешность АЦП.
В большинстве применений АЦП используют для измерения медленно изменяющегося низкочастотного сигнала (например, отдатчика температуры, давления, от тензодатчика и т. п.), когда входное напряжение пропорционально относительно постоянной физической величине. Здесь основную роль и играет статическая погрешность измерения. В спецификации АЦП этот тип погрешности определяют погрешность квантования, аддитивная погрешность, мультипликативная погрешность, дифференциальная нелинейность, интегральная нелинейность. Эти пять характеристик позволяют полностью описать статическую погрешность АЦП.
Аддитивная погрешность (погрешность смещения нуля). Идеальная передаточная характеристика АЦП пересекает начало координат, а первый переход кода происходит при достижении значения 1 LSB. Аддитивная погрешность (погрешность смещения нуля) может быть определена как смещение всей передаточной характеристики влево или вправо относительно оси входного напряжения, как показано на рис.. Таким образом, в определение аддитивной погрешности АЦП намеренно включено смещение 1/2 LSB.
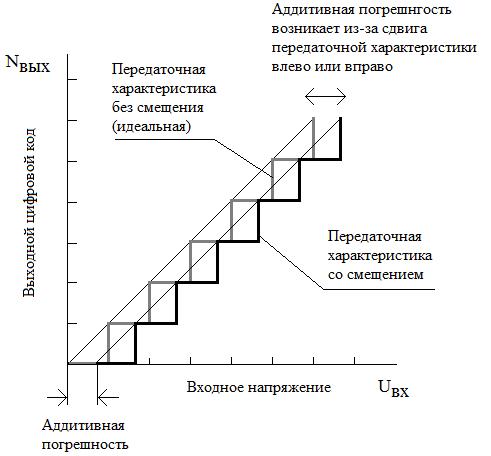
Рис. Определение аддитивной погрешности (offset error)
Масштабная (мультипликативная) погрешность. Мультипликативная погрешность представляет собой разность между идеальной и реальной передаточными характеристиками в точке максимального выходного значения при условии нулевой аддитивной погрешности (смещение отсутствует). Это проявляется как изменение наклона передаточной функции, что иллюстрирует рис. 10.
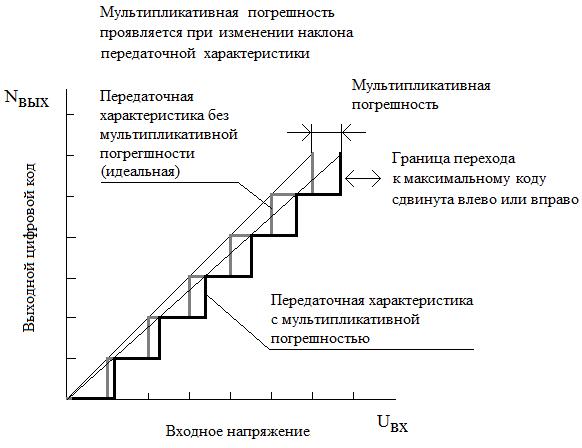
Рис. мультипликативной (масштабная) погрешности (full-scale error)
Дифференциальная нелинейность. У идеальной передаточной характеристики АЦП ширина каждой «ступеньки» должна быть одинакова. Разница в длине горизонтальных отрезков этой кусочно-линейной функции из 2N «ступеней», представляет собой дифференциальнуюнелинейность (DNL).
Величина наименьшего значащего разряд, у АЦП составляет Uref/2N, где Uref – опорное напряжение, N – разрешение АЦП. Разность напряжений между каждым кодовым переходом должна быть равна величине LSB. Отклонение этой разности от LSB определяется как дифференциальная нелинейность. На рис. это показано как неравные промежутки между «шагами» кода или как «размытость» границ переходов на передаточной характеристике АЦП.
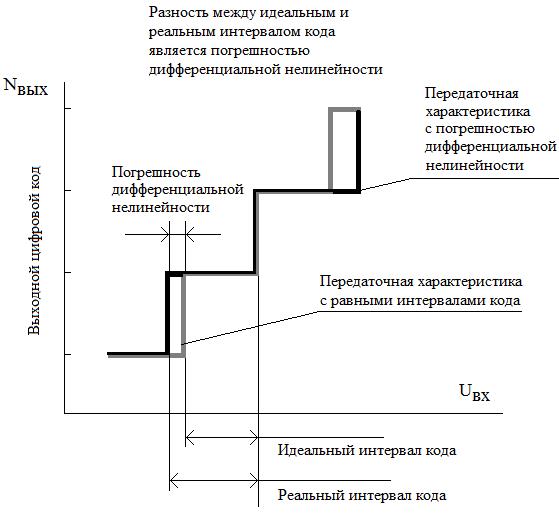
Рис. Определение погрешности дифференциальной нелинейности (DNL)
Дифференциальной нелинейностью АЦП в данной точке k характеристики преобразования называется разность между значением кванта преобразования hk и средним значением кванта преобразования h. В спецификациях на конкретные АЦП значения дифференциальной нелинейности выражаются в долях ЕМР или процентах от полной шкалы. Для характеристики, приведенной на рис. 25,
Погрешность дифференциальной нелинейности определяет два важных свойства АЦП: непропадание кодов и монотонность характеристики преобразования. Непропадание кодов – свойство АЦП выдавать все возможные выходные коды при изменении входного напряжения от начальной до конечной точки диапазона преобразования. При нормировании непропадания кодов указывается эквивалентная разрядность АЦП – максимальное количество разрядов АЦП, для которых не пропадают соответствующие им кодовые комбинации. Монотонность характеристики преобразования – это неизменность знака приращения выходного кода D при монотонном изменении входного преобразуемого сигнала. Монотонность не гарантирует малых значений дифференциальной нелинейности и непропадания кодов.
Интегральная нелинейность. Интегральная нелинейность (INL) – это погрешность, которая вызывается отклонением линейной функции передаточной характеристики АЦП от прямой линии, как показано на рис. 12. Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения. Интегральную нелинейность определяют путем сравнения напряжений, при которых происходят кодовые переходы. Для идеального АЦП эти переходы будут происходить при значениях входного напряжения, точно кратных LSB. А для реального преобразователя такое условие может выполняться спогрешностью. Разность между «идеальными» уровнями напряжения, при которых происходит кодовый переход, и их реальными значениями выражается в единицах LSB и называется интегральной нелинейностью.
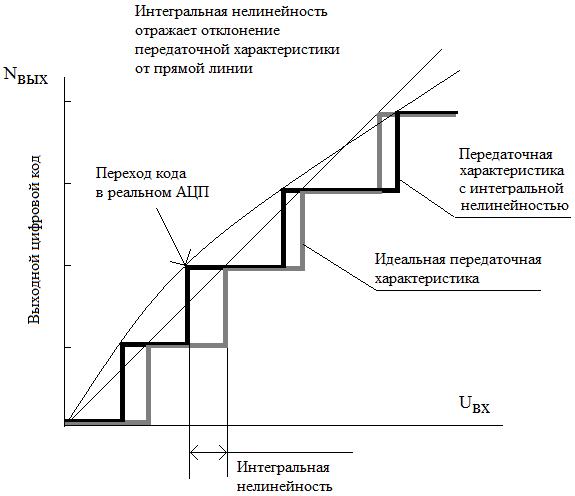
Рис. Определение погрешности интегральной нелинейности (INL)
Рассмотрим еще несколько характеристик, связанных со статической точностью преобразования.
Погрешность в конечной точке шкалы преобразования. Часто производитель определяет для АЦП статическую точность преобразования через такой интегральный параметр как погрешность в конечной точке шкалы преобразования. Эта погрешность характеризует степень отклонения функции преобразования в конечной точке шкалы, там, где она, как правило, максимальна. В наихудшем случае она равна сумме отдельных составляющих статической погрешности, которые были рассмотрены выше.
Погрешности полной шкалы и смещения нуля АЦП могут быть уменьшены либо подстройкой аналоговой части схемы, либо коррекцией вычислительного алгоритма цифровой части устройства.
Шум, приведенный к входу («шум перехода кода»). В идеале, повторяющиеся преобразования фиксированного постоянного входного сигнала должны давать один и тот же выходной код. Однако, вследствие неизбежного шума в схемах АЦП, существует некоторый диапазон (разброс) выходных кодов для любого заданного входного напряжения.
Реальные АЦП во многом отличаются от идеальных. Шум схем АЦП приводит, естественно, к отклонению поведения реальной функции преобразования от идеального. Его влияние на функцию АЦП показано на рис. 1. По мере увеличения аналогового входного напряжения «идеальный» АЦП (показанный на рис. 1а) поддерживает на выходе постоянный код до тех пор, пока не будет достигнута область перехода. В этой точке выходной код скачкообразно переходит к следующему значению и сохраняется до тех пор, пока не будет достигнута следующая область перехода. Теоретически идеальный АЦП имеет ширину переходной области равную нулю. У реального АЦП имеется конечная (отличная от нуля) ширина области перехода. На рис, 16 показан реальный АЦП: здесь ширина шума перехода кода от пика до пика приблизительно равна единице младшего значащего разряда (LSB).
В целом это можно представить как шумовой эффект от источника шума, последовательно соединенного с входом свободного от шумов АЦП. В этом смысле говорят, что все реальные аналого-цифровые преобразователи имеют определенную величину шума, приведенного к входу (или шума перехода кода). Шум, приведенный к входу, не нужно путать с шумом квантования, который представляет интерес, только когда АЦП обрабатывает сигналы, изменяющиеся во времени. В большинстве случаев чем меньше входной шум, тем лучше.

Рис. Шум перехода (шум, приведенный ко входу) и его влияние на функцию
преобразования идеального (а) и реального (б) АЦП
Если подать на вход АЦП постоянный сигнал и записать большое число преобразований, то в результате получится некоторое распределение кодов.
Шум, приведенный к входу, наиболее часто определяется путем анализа гистограммы некоторого числа отсчетов выходного сигнала при постоянном напряжении на входе АЦП. Выходной сигнал большинства АЦП представляет собой распределение кодов, обычно сосредоточенных вокруг номинального значения постоянного входного напряжения (рис. 2).
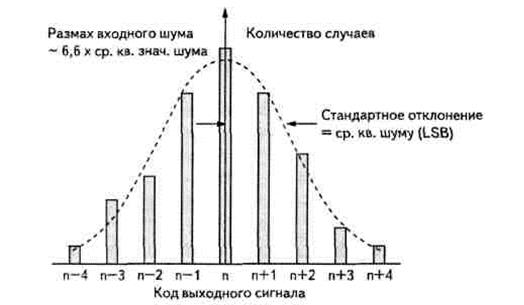
Рис. Влияние шума, приведенного ко входу, на гистограмму АЦП с заземленным входом
для АЦП с невысокой дифференциальной нелинейностью
Для того чтобы измерить величину шума, приведенного к входу, вход АЦП либо заземляется, либо соединяется с очень хорошо развязанным источником напряжения, после чего набирается большое количество отсчетов выходного сигнала, которые отображаются в виде гистограммы (называемой гистограммой заземленного входа, если на входе номинально нулевое напряжение).
Поскольку шум имеет почти гауссово распределение, стандартное отклонение гистограммы а, которое можно вычислить, соответствует эффективному среднеквадратичному входному шуму. Обычно этот среднеквадратичный шум выражают в единицах LSB. Если диапазон аналогового входного сигнала выражается в дискретных числах, или отсчетах, входные величины, такие как а, могут быть выражены числом единиц LSB.
Хотя присущая АЦП дифференциальная нелинейность (DNL) вызывает отклонение от идеального гауссова распределения (например, некоторая нелинейность отчетливо видна на рис. 2), оно является, по крайней мере, приблизительно гауссовым. В случае, когда существует значительная DNL, величина а вычисляется для нескольких различных входных напряжений и результаты усредняются. Если распределение кода существенно отличается от гауссова, что видно по большим и явно выраженным пикам и провалам, это может свидетельствовать либо о плохо спроектированном АЦП, либо, что более вероятно, – о некачественной топологии печатной платы, неудачных методиках заземления или неправильной развязке источника питания (рис. 3). Другой признак неблагополучия – то, что ширина распределения чрезмерно меняется по мере того, как постоянное напряжение на входе перемещается по входному диапазону АЦП.
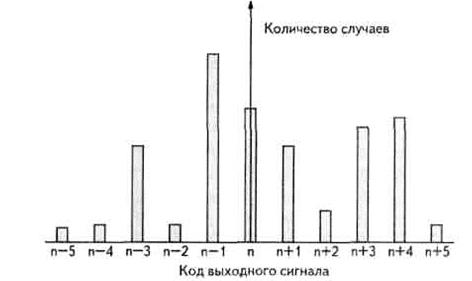
Рис. Гистограмма для АЦП с заземленным входом для плохо спроектированного АЦП и/или при некачественной топологии печатной платы, плохом способе заземления или неправильной разводке источника питания
Свободная от шумов разрешающая способность. Свободная от шумов разрешающая способность АЦП (или свободное от шумов разрешение кодов) – это число битов разрешения, выше которого невозможно четко различить отдельные коды. Это ограничение возникает из-за реального, описанного выше входного шума (шума, приведенного к входу), присутствующего во всех АЦП. С этой точки зрения говорят о числе значащих разрядов.
Качественные характеристики АЦП могут оцениваться с помощью спектрального анализа, по результатам выполнения быстрого преобразования Фурье (БПФ) над массивом выходных значений АЦП, соответствующих некоторому тестовому входному сигналу.
На рис. 13 представлен пример частотного спектра измеряемого сигнала. Нулевая гармоника соответствует основной частоте входного сигнала. Все остальное представляет собой шум, который содержит гармонические искажения, тепловой шум, шум 1/f и шум квантования. Некоторые составляющие шума генерируются самим АЦП, некоторые могут поступать на вход АЦП из внешних цепей. Гармонические искажения, например, могут содержаться в измеряемом сигнале одновременно генерироваться АЦП в процессе преобразования.
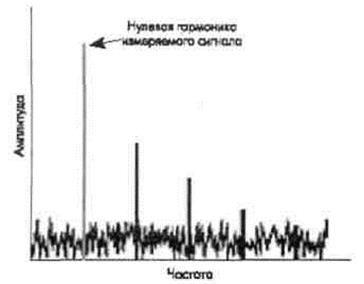
Рис. Результат выполнения БПФ над выходными данными АЦП
Отношение «сигнал/шум». Отношение «сигнал/шум» (SNR) – это отношение среднеквадратического значения величины входного сигнала к среднеквадратическому значению величины шума (за исключением гармонических искажений), выраженного в децибелах:
SNR (dB) = = 20 log [Vsigml(rms)/Vnoise(rms)]
Это значение позволяет определить долю шума в измеряемом сигнале по отношению к полезному сигналу.
Шум, измеряемый при расчете SNR, не включает гармонические искажения, но включает шум квантования. Для АЦП с определенным разрешением именно шум квантования ограничивает возможности преобразователя теоретически лучшим значением отношения «сигнал/шум», которое определяется как
SNR (dB) = 6.02 N + 1.76
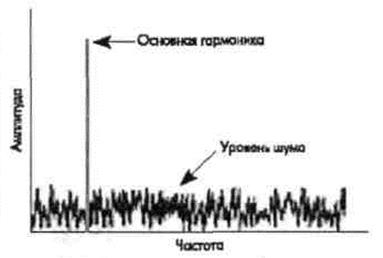
Рис. Определение SNR – отношение сигнал/шум
Спектр шума квантования АЦП стандартных архитектур имеет равномерное распределение по частоте. Поэтому величина этого шума не может быть уменьшена путем увеличения времени преобразования и последующего усреднения результатов. Шум квантования может быть снижен только путем проведения измерений с помощью АЦП большей разрядности.
Особенность сигма-дельта АЦП состоит в том, что спектр шума квантования у него распределен по частоте неравномерно – он смещен в сторону высоких частот. Поэтому, увеличивая время измерения (и, соответственно, количество выборок измеряемого сигнала), накапливая и затем усредняя полученную выборку (фильтр нижних частот), можно получить результат измерений с более высокой точностью. Естественно, при этом общее время преобразования будет возрастать.
Другие источники шума АЦП включают тепловой шум, шум составляющей 1/f и джиттер опорной частоты.
Общие гармонические искажения. Нелинейность в результатах преобразования данных приводит к появлению гармонических искажений. Такие искажения наблюдаются как «выбросы» в спектре частот на четных и нечетных гармониках измеряемого сигнала (рис. 15).
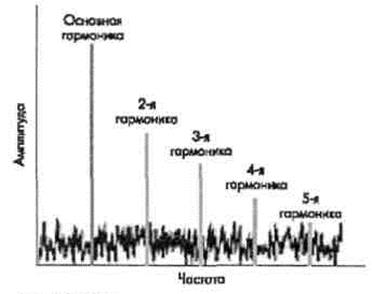
Рис. Отражение с помощью БПФ гармонических искажений
Этиискажения определяют как общие гармонические искажения (THD). Они определяются как
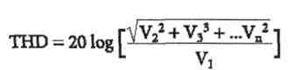
Величина гармонических искажений уменьшается на высоких частотах до точки, в которой амплитуда гармоник становится меньше, чем уровень шума. Таким образом, если мы анализируем вклад гармонических искажений в результаты преобразования, это можно делать либо во всем спектре частот, ограничивая при этом амплитуду гармоник уровнем шума, либо ограничивая полосу частот для анализа. Например, если в нашей системе стоит ФНЧ, то высокие частоты нам просто неинтересны и высокочастотные гармоники не подлежат учету. Отношение «сигнал/шум и искажения » Отношение «сигнал/шум и искажения» (SiNAD) более полно описывает шумовые характеристики АЦП. SiNAD учитывает величину как шума, так и гармонических искажений по отношению к полезному сигналу. SiNAD рассчитывается по следующей формуле:
Температурная нестабильность АЦ-преобразователя характеризуется температурными коэффициентами погрешности полной шкалы и погрешности смещения нуля.
Динамические характеристики. К основным динамическим характеристикам АЦП относят время преобразования и апертурное время. И конечно динамические погрешности.
Время преобразования – время от момента начала преобразования до момента получения на выходе устойчивого кода, соответствующего данной выборке. Выборкой называют значение сигнала, для которого определяется (которому соответствует) выходной код. Время преобразования для ряда алгоритмов кодирования и структур АЦП зависит от уровня кодируемого входного напряжения.
Апертурная неопределенность (апертурное время) – период, в течение которого невозможно однозначно определить, какому моменту времени соответствует полученный результат.

