 2015-06-24
2015-06-24 818
818Рассмотрим надежность ТС, предназначенных для автоматического регулирования технологического процесса. Допустим, что задания на рассматриваемую АСУ не изменяются во времени и условия эксплуатации соответствуют норме.
После возможных отказов обслуживающий персонал полностью восстанавливает свойства системы, а управляемый объект работает в неизменном режиме.
Рассматриваемая система (рис.12) состоит из объекта управления, на который действует возмущение ή(t), а регулируемая величина y(t) должна поддерживаться в соответствии с заданием yзад(t).
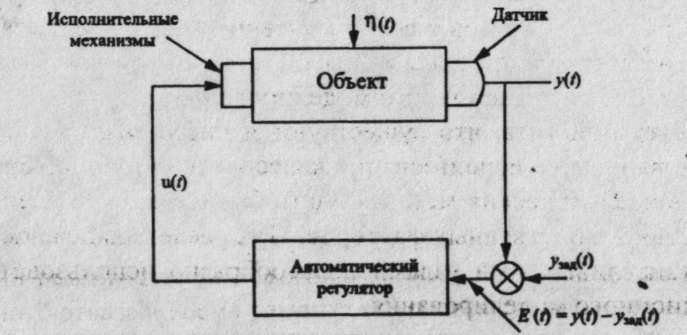
Рис.12 Пример системы с автоматическим управлением
Часто в АСУ ТП предусматривается ручное управление в случае отказа регулятора. Собственно регулятор является частью системы автоматического регулирования (САР). Такими же самостоятельными частями можно считать датчик, исполнительный механизм.
В процессе эксплуатации все эти составляющие САР подвержены влиянию внешних условий, условий эксплуатации и могут иметь как внезапные отказы, так и постепенные отказы типа дрейфа параметров. Если причины, вызывающие эти отказы независимы, то вероятность безотказной работы регулятора будет P(t) = Pвн(t)Pпост(t).
Закон внезапных отказов обычно незначительно отличается от показательного, и поток внезапных отказов распределен по закону Пуассона. Что касается надежности по постепенным отказам, необходимо знание динамических характеристик и настроек регулятора, законов изменения возмущающих воздействий и т.п.
Если автоматическое регулирование резервировано ручным управлением, то такую систему можно трактовать как систему с резервированием с той лишь разницей, что резервное (т.е. ручное) управление обладает другими числовыми значениями показателей надежности, а также более низкой эффективностью управления объектом.
С учетом этих замечаний можно определить надежность САР при отказе автоматического управления и переходе на ручное управление объектом. При ручном управлении, естественно, снижается эффективность работы объекта управления.








