 2015-07-04
2015-07-04 766
766Одной из разновидностей электроприводов с регуляторами положения является электропривод, предназначенный для отработки заданного положения механизма.
Основными требованиями к таким электроприводам являются обеспечение точности (обычно от 0,02% до 1% полного рабочего хода механизма в зависимости от его назначения), постоянный темп ускорения и замедления, ограничения скорости нарастания ускорения (для уменьшения ударов в механизме, особенно при наличии упругих связей).
АСУ с регуляторами положения широко применяют в агрегатах прокатных станов, станках с числовым программным управлением (ЧПУ) и других агрегатах. Это, например, приводы главного движения и подачи в станках с ЧПУ, которые должны обеспечить работу станка с максимально возможной производительностью при заданной точности и качестве обработки. Достаточно высокие требования по точности позиционирования предъявляются также к приводам нажимных устройств на прокатных станах.
Рассмотрим следящую систему на примере привода подачи станка с ЧПУ более подробно.
Составляющая усилия резания, которая передается на привод подачи, мала и ее изменение сказывается на работе привода незначительно. Поэтому привод подачи считают работающим в режиме постоянного момента при изменении скорости привода подачи: МПР = РПР / wПР» const, где РПР – мощность привода; wПР – частота вращения вала двигателя.
Стремление снизить потери мощности и потери на нагрев, увеличить надежность и упростить обслуживание обусловило замену гидравлических и шаговых приводов на электрические следящие приводы с высокомоментными двигателями постоянного тока. При этом во многих случаях значительно упростилась конструкция редуктора, уменьшились динамические нагрузки приводного механизма и их влияние на переходные процессы.
Привод подачи управляется по заранее заданной управляющей программе, определяющей входные сигналы в функции времени.
В микропроцессорных системах ЧПУ обратные связи по пути замыкаются в УЧПУ, а обратные связи по скорости – в блоке управления приводом. Одна из возможных схем следящего привода подачи приведена на рис. D.1.
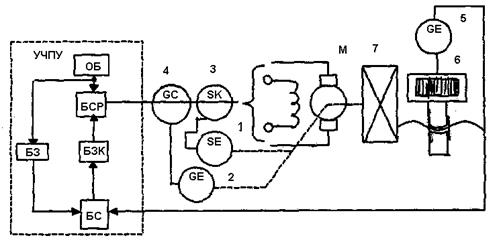
Рис. D.1. Функциональная схема следящего привода подачи:
ОБ – основной блок УЧПУ; БС – блок суммирования; БЗ – блок задания; БЗК – блок задания корректирующего сигнала; БСР – блок программного или аппаратного сравнения; М – двигатель; 1 – тахогенератор; 2 – круговой датчик пути; 3 – регулятор скорости с тиристорным преобразователем; 4 – регулятор положения; 5 – линейный датчик пути; 6 – стол станка; 7 – редуктор.
На выходе основного блока (ОБ) УЧПУ формируется сигнал задания. Он поступает на сумматор (БС), где суммируется с сигналом, пропорциональным дополнительному заданию на перемещение, которое необходимо для компенсации зазоров в кинематической цепи.
На выходе регулятора положения (блок 4) сигнал принимает значение в пределах ±10 В и величина его соответствует рассогласованию между заданным и фактически отработанным перемещением.
В прецизионных станках на столе станка устанавливают высокоточный линейный датчик 5. Если использовать в системе только эту обратную связь по положению, то зазоры в кинематической цепи и упругие деформации будут отрицательно влиять на динамику привода. Поэтому применяют гибридную схему обратной связи по положению, в которой на валу двигателя устанавливают круговой датчик, а на столе станка – линейный. При этом круговой датчик используют для позиционирования, а линейный – для автоматической коррекции погрешностей кинематической цепи.
Структурная схема следящего привода представлена на рис. D.2. В системе электродвигатель-редуктор наблюдаются нелинейные явления. Помимо упомянутого люфта в механической передаче наиболее характерными из них являются насыщение в магнитной системе двигателя и нелинейное трение.
С увеличением напряжения якоря UЯ магнитный поток и вращающий момент линейно возрастет. Затем наступает насыщение магнитопровода, и характеристика принимает вид ограничителя. Учитывая это, уравнение двигателя постоянного тока с управлением через обмотку якоря следует записать в виде
 ,
,
где j (U) – нелинейная функция управляющего напряжения (ограничитель).
Рис. D.2. Структурная схема следящего привода:
WРС (p) – передаточная функция регулятора скорости; WРП (р) – передаточная функция регулятора положения; KРЕД – передаточный коэффициент редуктора;
КП 1, КП 2 – коэффициенты обратной связи по положению; КC – коэффициент обратной связи по скорости
В установившемся режиме при больших значениях UЯ w = const и не зависит от дальнейшего увеличения UЯ.
Трение в механической передаче создает момент сопротивления
MC = M 1 + M 2,
где M 1 = M 0 sgn w – момент сухого трения; М 2 = K 1 w 2 – момент вязкого трения.
Момент вязкого трения при малых скоростях имеет линейный характер (r = 1), а при больших – квадратичный (r = 2).
Сухое трение не зависит от скорости w и определяется лишь ее знаком. Особенностью сухого трения является то, что при равенстве нулю скорости момент трения может принимать значение в пределах – M < M 1 £ M 0, причем в каждый данный момент времени момент трения равен сумме всех других моментов, включая момент сил инерции. Поэтому, если скорость стала равной нулю и сумма других моментов окажется по абсолютной величине меньше M 0, то система остановиться. Застой будет продолжаться до тех пор, пока сумма моментов не превысит величину M 0, после чего снова начнется движение системы. Если в процессе движения системы при w = 0 всегда оказывается, что сумма всех моментов больше момента трения, то застоев не будет.
Исследование такой системы весьма сложно. Значительного упрощения можно достигнуть, если принять Т = 0. Учитывая только сухое трение (M С = M 1 = M 0 sgn w) и рассматривая линейную часть характеристики момента управления j (U) = KU, получим
 ,
,
где  .
.
Отсюда определяется угловая скорость как нелинейная функция управляющего напряжения UЯ (см. рис. D.3)
Таким образом, сухое трение приводит к возникновению зоны нечувствительности. Совместное действие насыщения и сухого трения (без учета инерционности) приводит к нелинейной зависимости w = w (UЯ).
Структурная схема системы электродвигатель-редуктор с учетом инерционности двигателя, насыщения магнитной системы двигателя, нелинейного трения и люфта может быть представлена в виде, показанном на рис. D.4.
 |
Рис. D.3. Статическая характеристика

Рис. D.4. Структурная схема системы электродвигатель-редуктор








