 2015-07-04
2015-07-04 456
456Предположим, что нелинейная система управления описывается системой обыкновенных дифференциальных уравнений с постоянными коэффициентами.
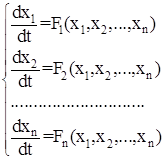 (1)
(1)
Системы такого вида называют динамическими системами. Название это заимствовано из механики.
Предположим, что функции Fk и их производные по всем переменным хj непрерывны.
Используя векторную запись, условимся обозначать:
 (2)
(2)
Система (1) можно кратко записать:
 (3)
(3)
Решение системы: 
Вектор начальных условий: 
Решение системы (1) однозначно определяется вектором начальных условий, заданных в некоторый момент времени t = t0. (Обычно t0 = 0).
Поэтому более наглядной является обозначение:  (4)
(4)
Или короче:
 (5)
(5)








