 2015-07-14
2015-07-14 2812
2812Предназначены для преобразования непрерывного изменения входной неэлектрической величины в изменение выходной эл. величины.
Основной характеристикой датчика является чувствительность  , где Δу,Δх – приращения выходной и входной величин.
, где Δу,Δх – приращения выходной и входной величин.
Контактные датчики
Резистивные датчики. У них подвижный скользящий контакт переменного резистора связан с элементом, перемещение которого контролируется.
Возможные схемы включения датчиков приведены на рис.49
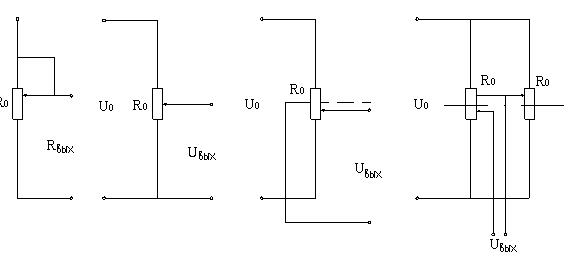
а) б) в) г)
Рисунок 49. Схемы включения резистивных датчиков.
Схема «а» - наиболее простая реостатная схема.
Схема «б» - широко применяется потенциометрическая схема.
Если входное сопротивление измерительной схемы велико, то выходное напряжение Uвых зависит от х и не зависит от R0
Чувствительность датчика с линейным перемещением подвижного контакта
Для повышения чувствительности желательно увеличивать напряжение питания U0. Однако при этом растет мощность, рассеиваемая датчиком.
Максимальная чувствительность  ,
,
где Pmax – наибольшая допустимая мощность резистора R0.
Схема «в». При перемещении подвижного контакта вниз или вверх от начального среднего положения выходное напряжение меняет полярность.
Схема «г». При перемещении левого подвижного контакта вниз правый с помощью механической передачи движется вверх. При этом чувствительность возрастает в 2 раза.
Чувствительность резистивных датчиков 3-5 В/мм.
Релейные датчики. Напряжение на контактах и ток через них не должен превышать значений необходимых для поддерживания дуги.
Мощность, коммутируемая контактами, не должна превышать 100-150 мВт.
Минимальная погрешность при срабатывании датчика находится в пределах 1-2 мкм.
Бесконтактные датчики.
Индуктивные датчики. Простейшие индуктивные датчики (рис.50,51).
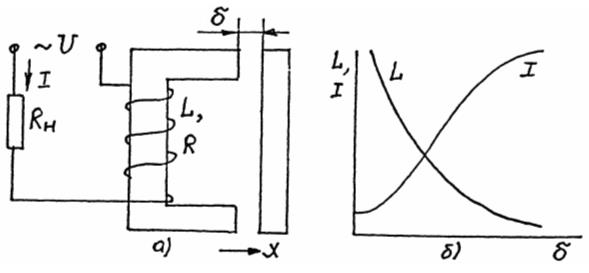
Рисунок 50. Индуктивный датчик с изменяющимся зазором.
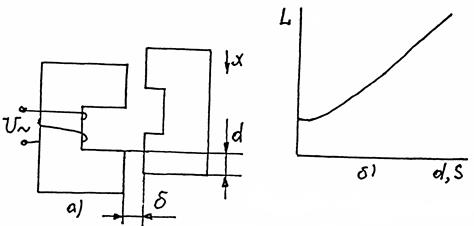
Рисунок 51. Индуктивный датчик с изменяющейся площадью зазора.
Допущения: пренебрегаем магнитными сопротивлениями стали, потоками рассеяния и выпучивания.
Индуктивность обмотки  .
.
Ток в цепи обмотки  .
.
Индуктивность обмотки и протекающий по ней ток могут изменяться за счет изменения зазора δ или его площади S.
Рис.50 – датчик с изменяемым зазором δ, а на рис.51 – с изменяемой площадью S.
Зависимость индуктивности и тока от зазора дана рис.50, б, а от площади или координаты d – на рис.51, б.
Чувствительность индуктивного датчика при изменении зазора  ; при изменении площади SS=ΔL/ΔS=L0/S0,
; при изменении площади SS=ΔL/ΔS=L0/S0,
где L0 – начальное значение индуктивности датчика при δ= δ0; S=S0;
δ0,S0 – длина зазора и его площадь в начале хода.
Таким образом, чувствительность Sδ является нелинейной функцией Δδ.
На якорь, рассмотренных датчиков действует сила, создается механическую нагрузку на элемент, перемещение которого контролируется:
 .
.
Для устранения этого недостатка применяется дифференциальные датчики (рис.53). Такой датчик содержит совершенно одинаковые и симметрично расположенные эл. магнитные системы. Ток в нагрузке Iн=I1-I2.
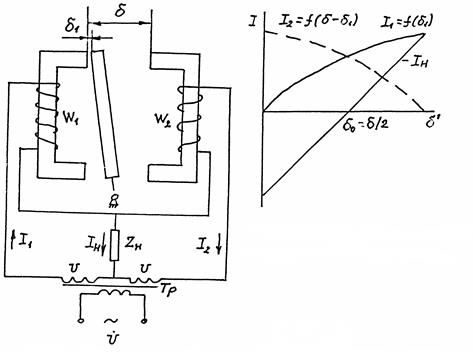
Рисунок 53.Дифференциальный индуктивный датчик.
При увеличении δ1 ток I1 в обмотке W1 увеличивается, а ток I2 в обмотке W2 уменьшается, так как зазор δ2= δ- δ1, тоже уменьшается.
Зависимость тока в нагрузке от зазора показана на рис. 53, б. Возрастает крутизна выходной характеристики по сравнению с рис.50, б, и она становиться более линейной.
Трансформаторные датчики. В датчике (рис.52) при изменении зазора δ полное сопротивление первичной обмотке  . Также меняется и происходит перераспределение U1 и U2.
. Также меняется и происходит перераспределение U1 и U2.
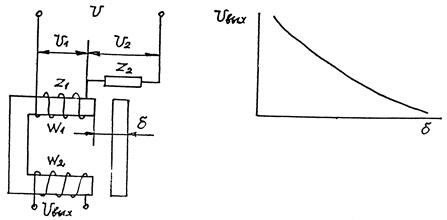
Рисунок 52. Трансформаторный датчик с одним магнитопроводом с изменяющимся зазором.
Выходное напряжение можно найти из уравнений U=U1+U2;  .
.
Зависимость Uвых=f(δ) представлена на рис.52, б.
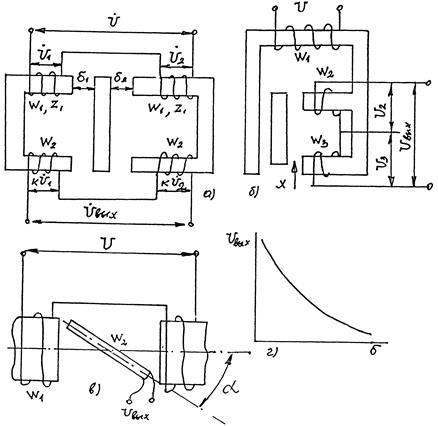
Рисунок 54. Трансформаторные датчики: а) дифференциальный; б) с изменяемой площадью зазора; в) с поворотной рамкой.
В более совершенном дифференциальном трансформаторном датчике (рис.54, а) выходное напряжение Uвых можно найти приближенно с помощью уравнений U=U1+U2;
 .
.
Таким образом, выходное напряжение прямо пропорционально разности зазоров δ2 - δ1.
При угловых перемещениях контролируемого элемента используются датчики с поворотной рамкой (рис.54, в). Выходное напряжение в таком датчике  ,
,
где Wp – число витков рамки;
В – максимальное значение индукции в зазоре;
Sp – площадь рамки;
α – угол поворота.

