 2015-07-14
2015-07-14 2158
2158Для аналитического определения угловых скоростей звеньев необходимо найти аналитическую связь углов b и d с углом поворота входного звена j. Для этого соединим точки В и D и обозначим  ,
,  ,
,  (рис.3.4.).
(рис.3.4.).
Из D АВD по теореме косинусов:

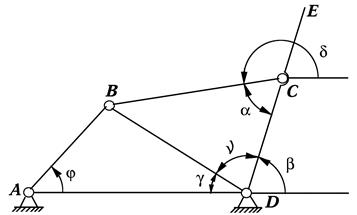
Рис.3.4.

Из этого же треугольника по теореме синусов:
 (3.1)
(3.1)
Из D ВСD по теореме косинусов:


 (3.2)
(3.2)
Из рис.3.4 видно, что  (3.3)
(3.3)
Подставив формулы (3.1) и (3.2) в выражение (3.3), получим:
 (3.4)
(3.4)
Из рис. 3.4 имеем:
 (3.5)
(3.5)
Из D ВСD по теореме синусов:

 (3.6)
(3.6)
Подставляя формулы (3.4) и (3.6) в выражение (3.5), получим:
 (3.7)
(3.7)
Определяем угловые скорости и угловые ускорения звеньев 2 и 3, учитывая, что  , где
, где

время одного оборота кривошипа.
Тогда:
 ;
;  ;
;
 ;
; 
Учитывая сложность функций d (j) и b (j), для нахождения w и e необходимо применять методы численного дифференцирования, приняв шаг дифференцирования

Линейные скорости точек и их проекции на оси координат:


Скорости центров масс звеньев:


Линейные ускорения точек и их проекции на оси координат:



Ускорения центров масс звеньев и их проекции на координатные оси:










Для реализации изложенных выше алгоритмов кинематического анализа кривошипно-ползунного и кривошипно-коромыслового механизмов разработаны программы расчетов на ЭВМ. Программы позволяют произвести расчет кинематических параметров движения звеньев для n положений входного звена.
Вопросы для самоконтроля:
1. В чем заключается аналитический метод кинематического анализа?
2. Как определить угловые скорости звеньев аналитическим методом?
3. Как определить угловые ускорения звеньев аналитическим методом?
4. Как определяются скорости движения точек звеньев механизма?
5. Как определяются ускорения движения точек звеньев механизма?








