 2015-08-21
2015-08-21 4369
4369Содержание
Введение…………………………………………………………………..
1. Нахождение стационарной точки.....…………………………………
2. Методы прямого поиска безусловной оптимизации....…………….
2.1.Метод поиска по симплексу....…………………………………….
2.2.Метод поиска Хука-Дживса..........................................…………….
2.3.Метод сопряженных направлений Пауэлла......……………….
3. Градиентные методы безусловной оптимизации……………………
3.1. Метод Коши.........................................................................................
3.2Метод Ньютона......................................................................................
3.3.Метод сопряженных градиентов.........................................................
3.4.Квазиньютоновский метод....................................................................
4.Заключение……………………………………………………………...
5.Библиографический список………....................………………………..
| Лист. |
Введение
Оптимизация как раздел математики существует достаточно давно. Оптимизация - это выбор, т.е. то, чем постоянно приходится заниматься в повседневной жизни. Термином "оптимизация" в литературе обозначают процесс или последовательность операций, позволяющих получить уточненное решение. Конечной целью оптимизации является отыскание наилучшего или "оптимального" решения.
Практика порождает все новые и новые задачи оптимизации причем их сложность растет. Требуются новые математические модели и методы, которые учитывают наличие многих критериев, проводят глобальный поиск оптимума. Реальные прикладные задачи оптимизации очень сложны. Современные методы оптимизации далеко не всегда справляются с решением реальных задач без помощи человека.
Оптимизационные методы минимизации и максимизации приобретают всё большую ценность и востребованность.
Методы оптимизации эффективно применяются в самых различных областях человеческой деятельности. Значительные успехи достигнуты при решении задач синтеза и анализа систем различного целевого назначения. Ускоренные темпы теоретических разработок в инженерную практику в существенной степени обусловлены широким распространением и совершенствованием средств вычислительной техники.
В настоящее время для инженера знание методов оптимизации также необходимо, как знание основ математического анализа, физики, радиоэлектроники и других дисциплин.
Нахождение стационарной точки
Целевая функция:

Для того, чтобы в точке  функция f(x) имела безусловный локальный экстремум необходимо, чтобы все её частные производные обращались в точке в нуль.
функция f(x) имела безусловный локальный экстремум необходимо, чтобы все её частные производные обращались в точке в нуль.
Найдем для данной целевой функции  частные производные
частные производные
по  и
и  :
:
Приравняв полученные выражения к нулю, получим систему уравнений:
Решение системы уравнений даёт результат:
Таким образом, экстремум целевой функции является точка с координатами х* =  Т, значение целевой функции, в которой:
Т, значение целевой функции, в которой:  .
.
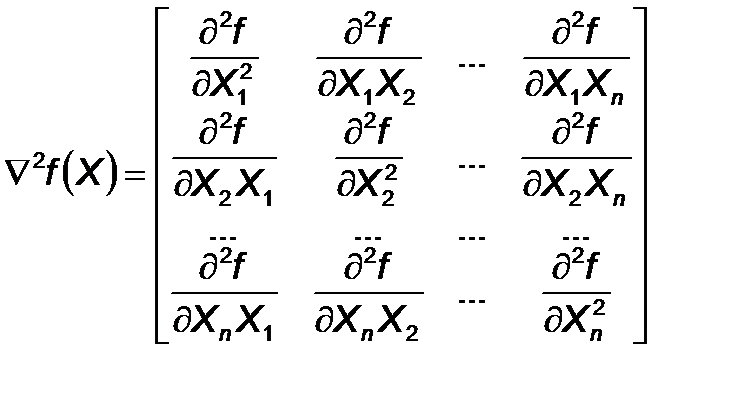
Для определения характера стационарной точки составим определитель матрицы Гессе. Под определителем Гессе понимается определитель, составленный из вторых производных исходной целевой функции.

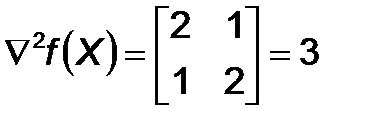
Так как гессиан функция - положительно определенная матрица (выполняются условия Сильвестра: все диагональные элементы матрицы Гессе - положительные величины, все ведущие главные определители положительные величины), стационарная точка является точкой минимума.
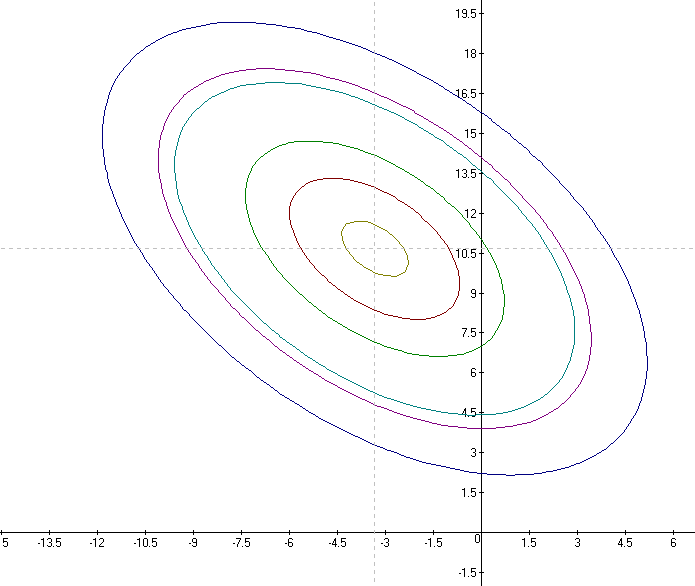
рис.1 линии уровня функции и точка экстремума x*








