 2015-10-14
2015-10-14 695
695Пусть на твердое тело действует произвольная пространственная система сил (F1 F2,....FN). Выберем произвольный центр О, называемый центром приведения, и перенесем, согласно доказанной выше лемме, все силы данной системы в этот центр. В результате получим N сил, приложенных в центре приведения, и N присоединенных пар, т.е. N вектор-моментов присоединенных пар (рис. 1.31, а). Складывая все силы, приложенные 2 центре О, получим одну результирующую силу

Сила R, равная геометрической сумме всех сил данной систе-
мы, называется главным вектором.
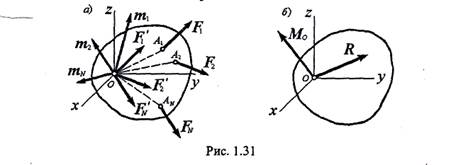
Здесь следует подчеркнуть, что вектор R есть главный вектор данной системы сил (F1 F2,....FN), а не равнодействующая этой системы, так как главный вектор не эквивалентен исходной системе сил. Главный вектор R является равнодействующей системы сил (F’l, F’2,....F'N), а не заданной системы (F1 F2,....FN) (рис. 1. 31, а).
Далее на основании теоремы 4 о сложении пар складываем моменты присоединенных пар, помня при этом, что момент каждой присоединенной пары равен моменту исходной силы относительно центра приведения. В результате получим

Величина Mo равная геометрической сумме моментов всех сил
системы относительно центра приведения, называется главным моментом относительно этого центрам Таким образом, мы доказали следующую теорему: произвольная пространственная система сил, действующих на абсолютно твердое тело, в общем случае эквивалентна одной силе, равной главному вектору этой системы и приложенной в произвольно выбранном центре приведения О, и главному моменту относительно этого центра приведения (рис. 1.31, б).
Из этой теоремы следует, что две произвольные пространствен
ные системы сил, имеющие одинаковые главные векторы и главные моменты относительно одного центра приведения, эквивалентны.








