 2015-10-22
2015-10-22 674
674Кинематическое исследование механизма сводится к следующему. В выбранном масштабе вычерчивается кинематическая схема механизма в нулевом положении (за нулевое положение принимается крайнее положение звеньев механизма в начале рабочего хода).
После этого производится разметка траекторий. Для этого траекторию конца кривошипа делят на 12 равных частей в направлении вращения ведущего звена ω1.
Методом засечек размечают траектории остальных звеньев. Если второе крайнее положение ведомого звена не попадает в разметку, то оно дополнительно определяется.
Для всех положений строятся планы скоростей в условном масштабе К1 кривошипов и планы ускорений в условном масштабе кривошипов. Масштабы планов скоростей и ускорений подсчитываются по формулам

 ,
, 
 (4,5)
(4,5)
Для наглядного представления об изменении кинематических параметров в течение периода строятся диаграммы
S=S(t), V=V(t), W=W(t).
Построение диаграмм производятся в следующем порядке:
1. На основании полученной разметки траектории точки ведомого звена в прямоугольных координатах строят график S=S(t).
2. Графически дифференцируя по методу хорд, получаем графики V=V(t). Масштаб скорости подсчитывается по формуле
 (6)
(6)
где H1 - полюсное расстояние.
3. Графически дифференцируя график V =V(t) по методу хорд, получаем график W=W(t). Масштаб ускорений определяется по формуле
где Н2 - полюсное расстояние при•вторичном дифференцировании.

|
|

|
|
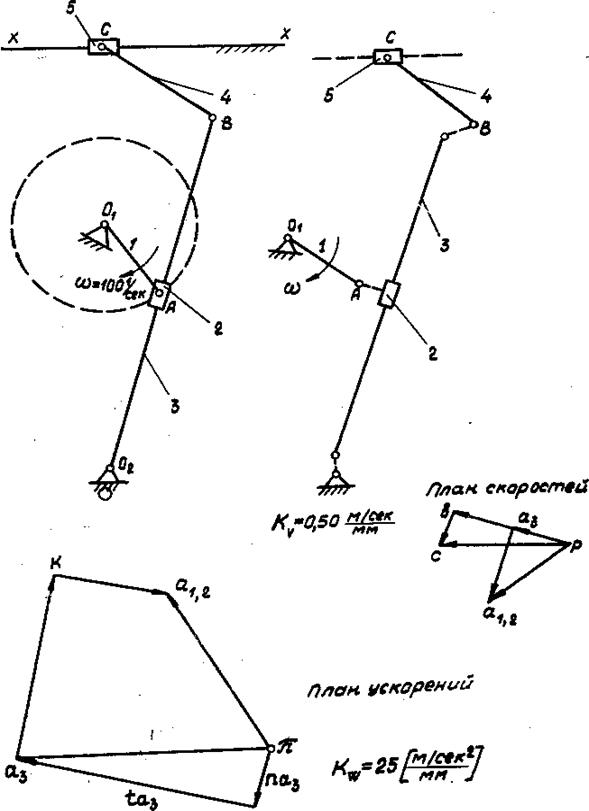
Рис.4
4. Для сравнения результатов кинематического анализа составляется таблица по следующей форме:
| ш п№№ п/п | Истинная скорость точки ведомого звена, м/с | Истинное ускорение точки ведомого звена, м/с | ||
| по плану скоростей | по диаграмме V=V(t) | по плану ускорений | по диаграмме W=W(t) | |
| * |
Пример построения планов скоростей и ускорений
для кулисного механизма (рис.4)
Вычерчиваем механизм в масштабе 1:5, Кl =0,0050 м/мм. Строим план скоростей для изображенного положения в условном масштабе одного кривошипа (K=I). Построение следует начинать с ведущего звена и первой группы Ассура, присоединенной к нему.
Из произвольно выбранной точки Р, принимаемой за полюс, откладываем отрезок ра1=К1·О1А, изображающий скорость т.А кривошипа, которую можно рассматривать как геометрическую сумму переносной вращательной скорости точки А кулисы и относительной вдоль кулисы
^ОА1 ^О2А || О2А
Из т. а1 плана скоростей проводим прямую параллельно О2А а из полюса Р - прямую, перпендикулярную O2A, и в точке их пересечения ставим букву а3. Отрезок ра3 изображает в масштабе Кv скорость т.А кулисы, а отрезок а1а3 – относительную скорость т.А вдоль кулисы.
Отрезок рв на плане скоростей, соответствует скорости т.В, находится из пропорции

Скорость т.С определяется построением геометрического равенства

||хх; ^О2В; ^ВС
Масштаб плана скоростей  .
.
Построим для того же положения пан ускорений в условном масштабе двух кривошипов (К2=2). Из произвольно выбранной точки П, принимаемая за полюс плана ускорений, откладываем отрезок Па1 = 2 О1А параллельно О1А, который будет изображать нормальное ускорение т.А1 кривошипа.
Так как т.А кривошипа участвует в переносном вращательном движении вместе с кулисой и относительно вдоль кулисы, то абсолютное ускорение т.А1 будет состоять из переносного, относительного и кориолисова ускорений
 (8)
(8)
Истинное значение  определяется по формуле
определяется по формуле
 ,
,
а величина отрезка в мм, изображающего его на плане
 ,
,
где ра3 – отрезок в мм, взятый с плана скоростей, построенного в масштабе К1 кривошипа; О2А – отрезок в мм, взятый с плана механизма, вычерченного в масштабе Кl.
Тангенциальная составляющая  известна только по направлению - ^О2А. Относительное ускорение
известна только по направлению - ^О2А. Относительное ускорение  известно только по направлению – параллельно О2А.
известно только по направлению – параллельно О2А.
Истинное значение кориолисова ускорения равно:
 ,
,
а величина отрезка, изображающего его на плане ускорений

Чтобы определить направление кориолисова ускорения, нужно вектор относительной скорости VА1А3 повернуть на 90° в сторону вращения кулисы. В нашем случае относительная скорость  направлена от А к 02, а звено 3 - кулиса вращается против часовой стрелки. Повернув вектор против часовой стрелки, мы и получаем направление
направлена от А к 02, а звено 3 - кулиса вращается против часовой стрелки. Повернув вектор против часовой стрелки, мы и получаем направление  .
.
В геометрическом равенстве (8) неизвестны величины двух ускорений и  , которые и определяются из построения плана ускорений.
, которые и определяются из построения плана ускорений.
Масштаб плана ускорений вычисляем по формуле
 .
.
Ускорение т. В имеет то же направление, что и  . Его чертежная величина находится из уравнения
. Его чертежная величина находится из уравнения
 .
.
Ускорение т. С параллельно XX, а величина его определяется графическим решением векторного уравнения
 ;
;  .
.
Здесь вс - отрезок с плана скоростей.








