 2018-01-21
2018-01-21 3392
3392Понятие звена
Звеном системы называется ее элемент (часть), обладающий определенными свойствами в динамическом отношении. Звенья систем регулирования могут иметь самую разнообразную физическую основу (электрические, гидравлические, механические и т. п.) и конструктивное выполнение, но при этом относиться к одной функциональной группе. Соотношение входного и выходного сигналов в звеньях одной и той же группы описывается одинаковыми дифференциальными уравнениями. Это свидетельствует о том, что такие звенья имеют одинаковые динамические свойства.
Так как процесс автоматического регулирования определяется только динамическими свойствами системы (а следовательно, и ее звеньев), то в основу классификации звеньев положены их динамические свойства. Такая классификация звеньев по виду описывающих эти звенья дифференциальных уравнений дает возможность разработать стройную теорию АСР и единые методы их исследования и расчета, не зависящие от различий в физических процессах и конструктивных решениях, принятых в основу при проектировании АСР и ее элементов.
Простейшими типовыми звеньями АСР являются: усилительное, интегрирующее, апериодическое, колебательное, дифференцирующее и запаздывающее звенья.
Усилительное звено
В усилительном звене выходная величина в каждый момент времени пропорциональна входной величине, т. е.
xвых = kxвх. (1)
[Здесь и в дальнейшем для сокращения записи выражения xвых(t) и xвх(t) записываются как xвых и xвх. Переходные процессы рассматриваются при нулевых начальных условиях.]
Коэффициент пропорциональности k называется коэффициентом усиления или коэффициентом передачи звена.Уравнение усилительного звена (1) алгебраическое. Это свидетельствует о том, что усилительное звено передает сигнал мгновенно, без динамических переходных процессов и искажений.

Рис. 1. Передаточная функция и переходный процесс усилительного звена.
На рис. 1 представлен характер изменения по времени выходной величины усилительного звена при подаче на его вход постоянной входной величины x0вх.
Передаточная функция звена имеет вид:
W(p) = k. (2)
Примерами усилительных звеньев могут служить механические передачи, потенциометрические датчики, безинерционные усилители (например, электронные) и т. п.
Выходная величина интегрирующего звена пропорциональна интегралу входной величины, т. е.
xвых = k  .
.
Дифференциальное уравнение интегрирующего звена имеет вид:
 . (3)
. (3)
Коэффициент k называется коэффициентом усиления или передачи звена по скорости. Он численно равен скорости изменения выходной величины при единичном значении входной величины.
Преобразовав дифференциальное уравнение звена (3) по Лапласу, получим:
pXвых(p) = kXвх(p),
откуда находим передаточную функцию звена:
W(p) = k/p. (4)
Если входная и выходная величины имеют одинаковую размерность, то из выражения (3) следует, что коэффициент k имеет размерность сек-1. В этом случае дифференциальное уравнение (3) удобнее записывать в виде
 ,
,
где T = 1/k.
При этом передаточная функция звена примет вид:
W(p)=  . (5)
. (5)
Величина T называется постоянной времени интегрирующего звена.

Рис. 2. Передаточная функция и переходный процесс интегрирующего звена.
На рис. 2 представлен характер изменения выходной величины интегрирующего звена при подаче на его вход постоянной входной величины x0вх. Тогда из уравнения (4) получим:
Xвых = ζ-1[Xвых(p)] = ζ-1[kx0вх  ] = kx0вхt.
] = kx0вхt.
 Примером интегрирующего звена может служить гидравлический исполнительный механизм (рис. 3,а), который находит широкое применение в современных системах регулирования. Входной величиной для него является перепад давлений ΔPвх= Р1 – P2, а выходной - перемещение ΔSвых поршня.
Примером интегрирующего звена может служить гидравлический исполнительный механизм (рис. 3,а), который находит широкое применение в современных системах регулирования. Входной величиной для него является перепад давлений ΔPвх= Р1 – P2, а выходной - перемещение ΔSвых поршня.
Рис 3. Примеры интегрирующих звеньев.
Сила давления на поршень равна fп = (P01 – P02)F, где F - эффективная площадь поршня.
Если пренебречь трением и инерцией поршня и связанных с ним масс, то можно считать, что это усиление целиком расходуется на преодоление внешней нагрузки, приложенной к поршню (сопротивление перемещению регулирующего органа, заслонки, шибера и т. п.):
fв.н = (P01 – P02)F. (6)
При небольших отклонениях от состояния равновесия расходы жидкости через вентили В1 и В2 пропорциональны перепадам давлений на вентилях
Q1=K1(P1 – P01); Q2=K2(P02-P2). (7)
Так как Q1 = Q2, то решив уравнения (6) и (7), получим:
P01 =  . (8)
. (8)
Поступление жидкости за бесконечно малый отрезок времени в левую полость исполнительного механизма при расходе Q1 составляет Q1dt. За счет этого поршень переместится на величину dΔSвых.
Так как объем поступившей жидкости равен приращению объема левой полости исполнительного механизма, то можно записать:
Qldt = FdΔSвых.
или
 .
.
Подставив из (7) значение Q1, а из (8) значение Р01, получим:
 .
.
В случае, если можно пренебречь величиной внешней нагрузки fв.н, уравнение примет вид:
 ,
,
где
k = 
- коэффициент передачи интегрирующего звена, величину которого можно изменять в широких пределах с помощью вентилей В1 и В2.
Таким образом, дифференциальное уравнение гидравлического исполнительного механизма имеет вид (3) и, следовательно, в динамическом отношении он является интегрирующим звеном.
Другим примером интегрирующего звена может служить электродвигатель постоянного тока Д (рис. 3,б) с независимым возбуждением и малой электромеханической инерцией, если входной величиной является напряжение Uвх, а выходной - угол поворота якоря βвых. В этом случае при изменении напряжения якоря на величину ΔUвх изменение числа оборотов двигателя Δn в единицу времени будет пропорционально ΔUвх:
Δn = K1 ΔUвх.
Увеличение угла поворота двигателя dΔβвых за бесконечно малый отрезок времени dt пропорционально изменению числа оборотов за этот отрезок времени: dΔβвых = K2Δndt, или d(Δβвых)/dt = K2Δn.
Подставив значение Δn, получим дифференциальное уравнение интегрирующего звена:
 .
.
Коэффициент передачи рассмотренного интегрирующего звена k = К1К2 может изменяться путем изменения величины напряжения Uо.в, подаваемого на обмотку возбуждения двигателя.
Апериодическому звену соответствует дифференциальное уравнение
 . (9)
. (9)
Перейдя к изображениям, получим:
ТрХвых(р) + Хвых(р) = kXвх(p).
Передаточная функция звена
W(p)=  . (10)
. (10)
Определим характер изменения выходной величины при подаче на вход в виде скачка входной величины x0вх.
Дифференциальное уравнение (9) достаточно просто решается обычным методом. Однако в качестве примера найдем его решение через передаточную функцию звена.
По таблицам преобразования Лапласа находим изображение входной величины:
Хвх(p) = ζ [x0вх] = x0вх/p.
Изображение выходной величины
Xвых(p)=W(p)Xвх(p) (11)
или
Xвых(p) =  .
.
Выразим оригинал функции xвых через ее изображение, вынеся постоянную величину за знак преобразования Лапласа:
xвых = ζ-1[Xвых(p)] =  .
.
Полагая 1/T = α, по таблицам преобразований Лапласа находим:
xвых=kx0вх(1-  ). (12)
). (12)

Рис. 4. Передаточная функция и переходные процессы апериодического звена при различных значениях постоянной времени.
Переходный процесс апериодического звена представлен на рис. 4. Кривые переходных процессов имеют вид экспонент, т. е. время, необходимое для того, чтобы выходная величина xвых достигла установившегося значения kx0вх, теоретически бесконечно велико.
В связи с этим апериодическое звено часто называют инерционным звеном первого порядка.
Величина Т имеет размерность времени и называется постоянной времени. На рис. 4 представлены переходные процессы апериодического звена при различных значениях постоянной времени.
Из кривых переходного процесса ясен физический смысл постоянной времени звена. Она может быть определена как время, в течение которого выходная величина достигла бы своего нового установившегося значения, если бы она изменялась с постоянной скоростью, равной скорости изменения ее в начальный момент времени.
Постоянная времени определяет динамические свойства звена. Чем она больше, тем медленнее протекает переходный процесс в звене, и наоборот. В частности, при T = 0 процесс протекает в звене мгновенно и инерционное звено превращается в безинерционное усилительное.
Следует отметить также, что при t = T значение выходной величины составляет 63% нового установившегося значения.
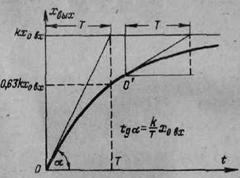
Рис. 5. Графическое определение постоянной времени апериодического звена.
Постоянная времени звена геометрически (рис. 5) определяется как проекция на ось времени отрезка касательной к экспоненте, заключенного между точкой касания и точкой пересечения касательной с линией установившегося значения выходной величины. Длина этой проекции одинакова для касательных, проведенных в любой точке экспоненты (точки O и O΄).
На рис. 6 приведены примеры апериодических звеньев. Входной величиной этих звеньев является напряжение uвх, а выходной - напряжение uвых, снимаемое с конденсатора С.

Рис 6. Примеры апериодическихзвеньев
Согласно второму закону Кирхгофа для электрической цепи по рис. 6,а можно записать:
uвх = iR1 + uвых; uвых =  ; uвых =
; uвых =  ,
,
откуда
 ;
;  .
.
По первому закону Кирхгофа
 .
.
Подставив значение i в выражение для uвх, получим:
 .
.
Преобразовав дифференциальное уравнение по Лапласу, получим:
 ,
,
откуда находим передаточную функцию звена:
 ,
,
где
 ;
;  .
.
Таким образом, электрическая цепь, изображенная на рис. 6,а, является апериодическим звеном.
Коэффициент передачи звена регулируется величинами сопротивлений R1 и R2. При этом пропорционально коэффициенту передачи изменяется и постоянная времени.
При R2=∞ получаем электрическую цепь по рис. 6,б. Коэффициент передачи, постоянная времени и передаточная функция в этом случае будут равны:
 ;
;  ;
;  .
.
Постоянная времени изменяется путем изменения величины сопротивления R.
Электрическая цепь, представленная на рис. 6,б, является апериодическим звеном с коэффициентом передачи, равным единице.
Колебательное звено имеет дифференциальное уравнение
 . (13)
. (13)
Передаточная функция звена
 . (14)
. (14)
Характер переходного процесса звена или соединения, определяемого дифференциальным уравнением (13), зависит от расположения корней его характеристического уравнения
 (15)
(15)
на комплексной плоскости.
Корни характеристического уравнения (15)
 (16)
(16)
С учетом (14), (11) и таблицы преобразований Лапласа, находим изображение выходной величины:
 . (17)
. (17)
 В зависимости от знака подкоренного выражения (16) при нахождении оригинала по его изображению (17) могут возникнуть три случая:
В зависимости от знака подкоренного выражения (16) при нахождении оригинала по его изображению (17) могут возникнуть три случая:
1. При T1/T2 > 2 оба корня характеристического уравнения вещественные отрицательные: р1 = - α1, р2 = - α2. С учетом этого запишем выражение (17) в виде
 .
.
По этому изображению согласно таблицы преобразований Лапласа находим оригинал:
 . (18)
. (18)
Таким образом, при T1/T2 > 2 переходный процесс определяется двумя экспонентами и в этом случае дифференциальное уравнение (13) характеризует переходные процессы соединения, состоящего из двух соединенных последовательно апериодических звеньев. Это видно также непосредственно из передаточной функции соединения, если ее записать в виде

или
 ,
,
где T3=1/α1 и T4=1/ α2.
Следовательно, при T1/T2 > 2 нет необходимости вводить понятия нового типового звена, хотя на практике часто такое соединение называют инерционным звеном второго порядка.
2. При T1/T2 = 2 характеристическое уравнение имеет два одинаковых вещественных отрицательных корня
p1 = p2 = - α = - 1/T2.
С учетом этого запишем выражение (17) в виде
 .
.
По таблице преобразования Лапласа находим:
 . (19)
. (19)
Переходный процесс периодический. Так как при этом передаточная функция (14) может быть представлена в виде
 ,
,
где T = 1/α, то при T1/T2 = 2, так же как и при T1/T2> 2, нет необходимости вводить понятия нового типового звена.
3. При T1/T2< 2 характеристическое уравнение имеет два сопряженных комплексных корня
 ,
,
где
 ;
;  . (20)
. (20)
С учетом этого запишем выражение (17) в виде
 . (21)
. (21)
Обозначив в (21)
 и
и  ,
,
найдем оригиналы:
 и
и  .
.
Находим характер изменения выходной величины звена:


 ,
,

 или
или  . (22)
. (22)
Таким образом, переходный процесс звена при T1/T2< 2, характеризуемый уравнением (22), периодичен и представляет собой затухающую синусоиду, амплитуда которой убывает от полупериода к полупериоду по экспоненциальному закону  . В этом случае звено нельзя представить в виде соединения из других звеньев. В связи с этим элементарное звено, динамические качества которого определяются дифференциальным уравнением (13), при T1/T2< 2 относится к типовым звеньям и называется колебательным звеном.Переходные процессы колебательного звена в зависимости от отношения T1/T2 представлены на рис. 7.
. В этом случае звено нельзя представить в виде соединения из других звеньев. В связи с этим элементарное звено, динамические качества которого определяются дифференциальным уравнением (13), при T1/T2< 2 относится к типовым звеньям и называется колебательным звеном.Переходные процессы колебательного звена в зависимости от отношения T1/T2 представлены на рис. 7.

Рис. 7. Передаточная функция и переходные процессы колеба-тельного звена при различных значениях отношения постоянных времени.
Как следует из выражения (22), мнимая составляющая ω корней характеристического уравнения является круговой частотой колебательного звена. Период колебаний Т = 2π/ω. Оценкой переходного процесса колебательного звена служит степень затухания колебаний. Степенью затухания ψ называется отношение разности двух соседних амплитуд одного знака (взятых относительно среднего положения kx0вх) к первой из них (рис. 8,а):
 . (23)
. (23)
Как следует из рис. 8,а,
 ,
,  .
.
Так как t2 – t1 = T, то подставив значения A1 и A2 в (23), получим:
 . (24)
. (24)
Чем ближе к единице величина ψ, тем быстрее затухают колебания переходного процесса.

Рис. 8. Переходные процессы колебательного звена при 1>ψ>0 и ψ = 0.
Степень затухания зависит от отношения вещественной составляющей комплексных корней характеристического уравнения α к их мнимой составляющей ω. В свою очередь это отношение определяется отношением постоянных времени T1/T2:
 .
.
4. При T1 = 0 T1/T2 = 0 вещественная и мнимая составляющие корней характеристического уравнения будут равны:
 ;
;  .
.
Подставив эти значения в выражение (22) для переходного процесса колебательного звена, получим
 . (25)
. (25)
Такое колебательное звено называется консервативным.
Переходный процесс будет в этом случае незатухающим колебательным (так как ψ = 0) с частотой ω0 = 1/T2, периодом T = 2πT2 и амплитудой A=kx0вх (рис.8,б).
Чем больше T1 и меньше Т2, тем больше степень затухания колебательного звена.


 Следовательно, для уменьшения колебательности систем регулирования в колебательных звеньях необходимо увеличивать постоянную времени T1 и уменьшать T2. Однако это целесообразно делать лишь и определенных пределах, так как при чрезмерном увеличении отношения T1/T2 переходный процесс затягивается (см. рис. 7) и время регулирования увеличивается.
Следовательно, для уменьшения колебательности систем регулирования в колебательных звеньях необходимо увеличивать постоянную времени T1 и уменьшать T2. Однако это целесообразно делать лишь и определенных пределах, так как при чрезмерном увеличении отношения T1/T2 переходный процесс затягивается (см. рис. 7) и время регулирования увеличивается.
На рис. 9 даны примеры колебательных звеньев.
Входной величиной мембранного пневматического клапана (рис. 9,а) является давление ΔРвх, а выходной – перемещение ΔSвых штока клапана (отсчет ведется в малых приращениях от равновесного состояния).

Рис. 9. Примеры колебательных звеньев.
Если нельзя пренебречь инерцией подвижной системы клапана и силами трения, то условие равновесия сил, действующих на клапан, запишется как
 .
.
Входное усилие при площади F мембраны равно:
 .
.
Сила инерции fи равна произведению массы m подвижной системы на ускорение a = d2(ΔSвых)/dt2:
 .
.
Учитывая только силу вязкого трения, которая пропорциональна скорости перемещения подвижной системы, получим:
 .
.
Сила противодействия пружины пропорциональна ее сжатию
 ,
,
где с - жесткость пружины.
Подставив значения сил в уравнение равновесия, получим:
 .
.
В настоящее время принято составлять дифференциальные уравнения звеньев в безразмерных (относительных) единицах.
Безразмерной единицей давления будем считать отношение ΔРвх к максимальной величине давления Рмакс на мембрану, при котором клапан полностью закрывается; безразмерной единицей перемещения штока клапана примем отношение ΔSвых к полному ходу Sмакс
 ;
;  ,
,
откуда
 ;
;  ;
;

 .
.
Подставив эти значения в дифференциальное уравнение, получим выражение его в безразмерных единицах:
 .
.
С учетом того, что сSмакс = РмаксF, можно записать:
 .
.
Таким образом, при учете инерции подвижной системы и вязкого трения мембранный пневматический клапан при b/  <2 является колебательным звеном.
<2 является колебательным звеном.
Постоянные времени и коэффициент передачи его равны:
 ;
;  ; .
; .
Из этого примера следует, что в элементах систем регулирования вязкое трение не всегда является нежелательным. В данном случае достаточно высокое вязкое трение обеспечивает устойчивую работу клапана, так как постоянная времени T1 пропорциональна коэффициенту вязкого сопротивления b.
Практически, когда силы вязкого трения в механических элементах недостаточны, применяют дополнительное демпфирование подвижной системы, т. е. вводят дополнительную силу, противодействующую перемещению подвижной системы и пропорциональную скорости этого перемещения.
Если пневматический клапан применяется в системе с инерционным объектом, в котором переходные процессы протекают медленно, т. е. скорости изменения рвх и sвых небольшие, то величина ускорения d2Sвых/dt 2 с точностью, достаточной для практических расчетов, может быть принята равной нулю. Тогда дифференциальное уравнение клапана примет вид:
 .
.
Следовательно, в этом случае можно пренебречь инерционностью подвижных частей пневматического клапана и представлять его в динамическом отношении как апериодическое звено с передаточной функцией; определяемой формулой (10).
Па рис. 9,б приведена электрическая схема, переходный процесс которой также описывается дифференциальным уравнением второго порядка.
Постоянные времени и коэффициент передачи в этом случае равны:
 ;
;
 ;
;
 .
.
При T1/T2< 2 схема представляется колебательным звеном. Все три параметра схемы выражаются через одни и те же величины четырех сопротивлений и двух емкостей. Это является ее недостатком, так как параметры настройки, определяющие динамические свойства звена, взаимозависимы. Поэтому установка оптимальной величины одного из трех параметров настройки в большинстве случаев не дает возможности получить оптимальные значения также для двух остальных параметров. Кроме этого, такая настройка трудоемка и требует высокой квалификации наладчика.

