 2018-01-21
2018-01-21 579
579Структуризация систем управления представляет собой выделение независимых подсистем, которые функционируют самостоятельно на различных режимах. В этом случае систему можно рассматривать как многоконтурную с вложенными контурами. Каждый внутренний контур имеет быстродействие на порядок больше внешнего контура. В этом случае время переходного процесса во внутреннем контуре на порядок меньше времени регулирования во внешнем контуре.
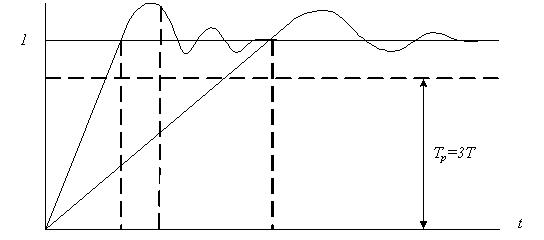
Рис. Переходные процессы в короткопериодическом внутреннем и длиннопериодическом внешнем контурах структуризованной системы
На современных самолетах используются режимы автоматического, полуавтоматического и ручного управления.
Рассмотрим электрический привод, описываемый уравнением:
 , где
, где  – угол поворота вала привода.
– угол поворота вала привода.
Закон управления приводом:
Собственное возмущенное движение привода с гибкой обратной связью описывается уравнением:

В этом случае привод с гибкой обратной связью обладает собственной частотой и коэффициентом относительного демпфирования:
 ;
; 
Обычно выбирают  ;
; 
Для управления короткопериодическим угловым движением самолета используется соотношение между желаемой частотой привода  и частотой короткопериодического углового движения самолета с автоматикой
и частотой короткопериодического углового движения самолета с автоматикой  в соответствии с неравенством:
в соответствии с неравенством:

 ;
;  (2 контур)
(2 контур)
Для траекторного контура желаемая частота длиннопериодического колебательного движения выбирается на один – два порядка меньше частоты короткопериодического углового движения самолета
 ;
;  ;
;  (3 контур)
(3 контур)
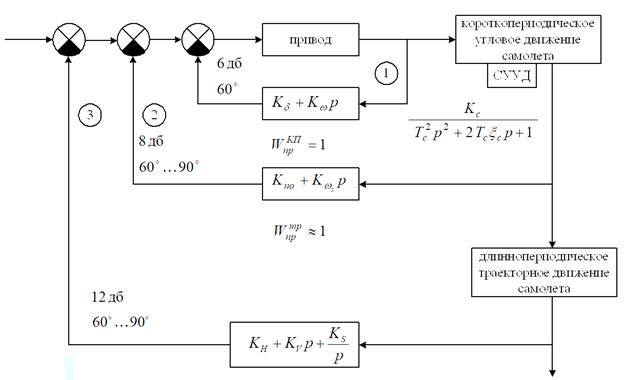
Рис. Схема системы управления самолета с вложенными контурами управления следящим электрическим приводом, системой улучшения устойчивости и управляемости углового движения и астатической системы стабилизации высоты
При синтезе траекторного контура передаточной функции привода и самолета в угловом движении считаются идеальными. Выполняется расчет управляющего устройства (контролера), который включает в закон управления позиционный сигнал по высоте  , коэффициент усиления
, коэффициент усиления  по скорости набора высоты vy и изодромный интегральный сигнал от ошибки регулирования высоты с коэффициентом усиления
по скорости набора высоты vy и изодромный интегральный сигнал от ошибки регулирования высоты с коэффициентом усиления  , позволяющий создать астатизм и обеспечить нулевую среднюю ошибку стабилизации.
, позволяющий создать астатизм и обеспечить нулевую среднюю ошибку стабилизации.
2.5 Исследование устойчивости для систем порядка n
Рассматривается линейная стационарная система, движение которой описывается системой n дифференциальных уравнений в форме Коши, разрешенных относительно производных
 =
= 
Элементы матрицы динамических коэффициентов А не зависят от времени:
A = 
С использованием программы damp вычисляем собственные значения матрицы динамических коэффициентов А
damp (A)
Собственные значения матрицы динамических коэффициентов А могут быть вещественного либо комплексного типа
 =
= 
 =
=  j
j 
2.5.1 Корневой анализ системы порядка n
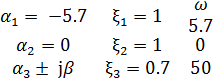
Динамическая система имеет n- корней, из которых k – число вещественных корней и n- k – число комплексно сопряженных корней. Если все корни имеют вещественную отрицательную часть, то динамическая система устойчива. Если хотя бы один корень положительный, то система неустойчива.
x =  +
+  sin(
sin(  )
)
число колебательных форм движения
L = 
 = k + L
= k + L
 =
=  , =
, = 
Система порядка n имеет k апериодических форм движения с частотой среза  =
=  , равной модулю вещественной части корня, и L = колебательных форм движения с частотой среза
, равной модулю вещественной части корня, и L = колебательных форм движения с частотой среза 
Все формы ранжируются в порядке возрастания частоты от минимальной до максимальной. Главной является 1-я форма с минимальной частотой. Если этой частоте соответствует вещественный корень, то 1-я форма естьапериодическое движение, а если собственное значение – комплексно-сопряженнаявеличина, то 1-я форма представляет собой колебательное движение.
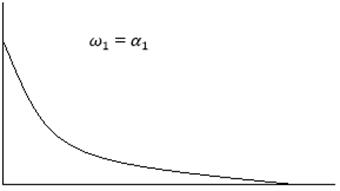
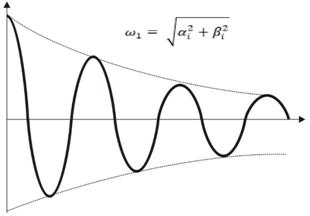
Рис. Варианты первой формы движения апериодического и колебательного типа.
Результатом частотного анализа собственных значений является:
1. Устойчивость системы, если все вещественные части корней – отрицательны.
2. Определение 1-ой формы движения по величине минимального по модулю собственного значения частоты (где форма движения может быть апериодической или колебательной в зависимости от того, каким является минимальный по модулю корень (вещественным или комплексно-сопряженным))
3. Определение числа апериодических форм движенияk и колебательных форм движения L
4. Для каждой формы колебательного движения определяются значения частоты и коэффициента относительного демпфирования.
5. Для систем с автоматикой требуется, чтобы коэффициент относительного демпфирования составлял  для истребителей,
для истребителей,  для пассажирских самолетов и не превышал
для пассажирских самолетов и не превышал  для самолетов всех типов.
для самолетов всех типов.
Пример:
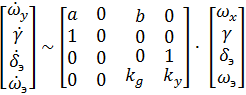
Угловое движение по крену самолета с приводом элеронов.
 = a
= a  + b
+ b 
 =
= 
 =
= 
 = -
= -  –
–  +
+  ,
,  – командный сигнал
– командный сигнал
 +
+ 
A = 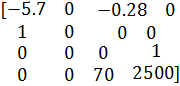
damp (A)
После линейного анализа на устойчивость разомкнутой системы решается задача синтеза системы управления по заданным техническим характеристикам и критериям устойчивости.








