2018-01-21
2018-01-21 4097
4097| Типи процесів: перехідні, усталені, статичні | |
 Перехідним процесом називають процес зміни в часі різних перемінних системи (фазових, вихідних змінних, відхилень і т. д.), в ході якого система змінює свій стан. Перехідним процесом називають процес зміни в часі різних перемінних системи (фазових, вихідних змінних, відхилень і т. д.), в ході якого система змінює свій стан. | |
| Аналітичний вигляд | |
 Графічний вигляд Графічний вигляд | |
часові діаграми 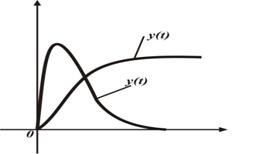 | фазові траєкторії 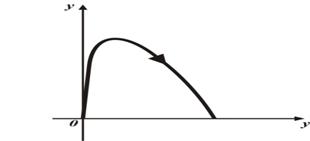 |
Щоб уявити перехідний процес в аналітичному вигляді треба розглянути рішення рівняння

 (7.1)
(7.1)
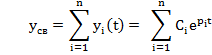
Рішення y (t) може бути представлено у вигляді
 (7.2)
(7.2)
Вимушена складова  - частинне рішення - відповідає перехідному процесу системи (7.1) при початкових умовах
- частинне рішення - відповідає перехідному процесу системи (7.1) при початкових умовах  і є реакцією системи на вхідний вплив u (t).
і є реакцією системи на вхідний вплив u (t).
Вільна складова  характеризує перехідний процес автономної системи (при u(t) = 0), відповідає загальному рішенню відповідного однорідного диференціального рівняння і залежить від початкових умов
характеризує перехідний процес автономної системи (при u(t) = 0), відповідає загальному рішенню відповідного однорідного диференціального рівняння і залежить від початкових умов  .
.
Автономні системи
• 1. Якщо коріння дійсні  , то перехідний процес носить аперіодичний характер
, то перехідний процес носить аперіодичний характер  .
.
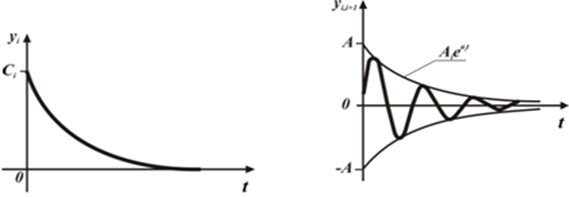
• 2. Якщо коріння комплексно-зв'язані 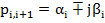 , (
, ( - дійсна частина кореня, j =
- дійсна частина кореня, j =  - уявна одиниця,
- уявна одиниця,  - коефіцієнт при уявній частині), то перехідний процес – коливальний
- коефіцієнт при уявній частині), то перехідний процес – коливальний 
Вимушений рух. Перехідна характеристика.
Вимушена складова перехідного процесу  залежить від вхідної дії і може бути аналітично визначена тільки для ряду окремих випадків, відповідних деяким типовим вхідним сигналам.
залежить від вхідної дії і може бути аналітично визначена тільки для ряду окремих випадків, відповідних деяким типовим вхідним сигналам.
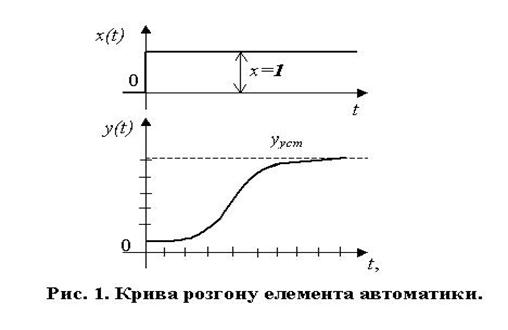
Перехідна́ фу́нкція — зміна вихідної величини у часі при подачі на вхід одиничного ступінчастого впливу.
Перехідна функція може бути отримана шляхом рішення диференціального рівняння класичним методом або, використовуючи перетворення Лапласа, операційним методом.
Перехідна характеристика — графічне зображення перехідної функції.
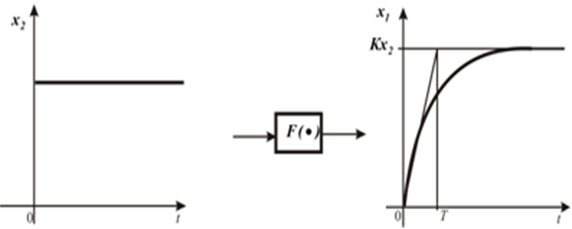
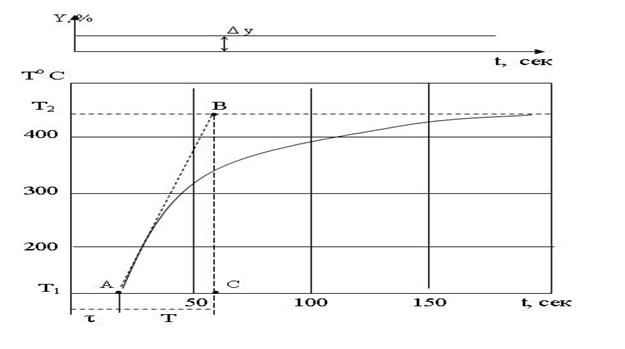
Крива розгону — перехідна характеристика керованого об'єкта (перехід системи регулювання від одного сталого режиму до іншого).
• Одинична ступінчаста дія – це дія, яка миттєво змінюється від нуля до одиниці і надалі залишається незмінною. Аналітичним виразом одиничної сходинкової дії є одинична сходинкова функція, яка позначається 1(t).
 |  |
•  -перехідна функція
-перехідна функція
Основними параметрами кривої розгону статичних об'єктів регулювання першого порядку є:
постійна часу, Т,
транспортне запізнювання, τ.
Сигнали на вході і на виході при побудові перехідної характеристики:
 x(t) y(t)=h(t) x(t) y(t)=h(t)
| ||||||||
 |