2018-01-21
2018-01-21 1277
1277


 u(t)
u(t)  y(t)
y(t)
Вихід системи в довільний момент часу  єдиним чином визначається початковими значеннями змінних стану
єдиним чином визначається початковими значеннями змінних стану  і заданим на інтервалі часу [
і заданим на інтервалі часу [  ] впливом
] впливом  :
:
 )
)
8.2.1. Розглянемо одноканальну систему (об’єкт керування), що описується диференціальним рівнянням:
 . (8.11)
. (8.11)
Застосуємо тіж змінні стану, що і для автономної системи (8.2):
 .
.
Із (8.2) і (8.11) можна отримати систему рівнянь станута рівняння виходу аналогічні (8.3), (8.4):
 ,
,


…
 , (8.12)
, (8.12)
 (8.13)
(8.13)
• Рівняння (8.12), (8.13) – найпростіша модель вхід-стан-вихід (ВСВ).
• У більш загальному випадкумодель ВСВ:
 (8.14)
(8.14)
 (8.15)
(8.15)
де  , B =
, B =  ,
,
 .
.
• 8.2.2. Модель ВСВ багатоканальної системи (ОК):
` (8.14)
(8.15)
де ,
B =  , ,
|
| |||
 . .
| ||||
Керуючівливи-  , ,  ; вихідні змінні- ; вихідні змінні-  , ,  змінні стану- змінні стану-  , ,  . .
|






• 8.2.3. Модель ВСВ багатоканальної системи (ОК), на яку діють збурення f(t):
 (8.16)
(8.16)
(8.17)
де D =  .
.
 f(t) f(t)
| ||
| u(t) x(t) | y(t) | |
    
|
Лекція 9. Структурні схеми САК
• 9.1. Загальні поняття.
• 9.2. Умовні позначення.
• 9.3. Правила перетворення.
• 9.4. Типова одноконтурна система.
Загальні поняття
• Структурнасхемасистемиавтоматичногокерування (САК) - графічнезображеннясистемиувиглядісукупностічастин (блоків), наякіїїможнарозділитизапевнимиознаками, ізв'язківміжчастинами (блоками) іззазначеннямнапрямкупередачівпливів.
• Структурнасхема - графічнезображенняматематичноїмоделісистемиавтоматичногокерування.
• Наструктурнійсхемізображують ланки САК (якимставлятьувідповідністьпередавальніфункціїланокабооператоривиконуванихниминелінійнихперетворень), зв'язки та вузли (точкирозгалуженнязв'язків).
Серед найважливіших ланок з елементарними алгоритмами розрізняють:
- динамічні (змінюють вхідний вплив у часі) - інтегруючі, дифференцируючі, часової затримки…;
- формуючі (змінюють масштаб і форму вхідного впливу і т.п.) - пропорційні, модуляційні, імпульсні;
- арифметичні - підсумовуючі, розмножувальні тощо;
- логічні (здійснюють логічні операції над вхідними величинами).
• Динамічна ланка – це умовно виділена частина системи автоматичного керування, яка виконує найпростіші перетворення сигналів.
• Динамічна ланки відповідають певним перетворенням сигналів у системі. Ці перетворення описують як правило засобами математики, а саме передатною функцією динамічної ланки.
• Динамічні ланки з’єднують між собою стрілками, які відповідають напрямку передачі сигналу від однієї ланки до іншої. Динамічні ланки є ланками направленої дії.
• Ланка направленої дії - це ланка, яка передає сигнал тільки в одному напрямку з входу на вихід і її властивості не залежать від інших ланок, з якими вона з’єднана.
• Структурні схеми розробляються при проектуванні виробів (установок) на стадіях, що є попередніми відносно розробки схем інших типів, використовуються для загального ознайомлення з виробом (установкою).
• Схеми автоматизації, як правило, виконують без дотримання масштабу. У монтажних схемах дотримується дійсне просторове розташування окремих засобів автоматизації і монтажних виробів.
• Оскільки передавальні функції систем адекватно описують їх динамічні властивості, одну Структурну схему можна замінити іншою, еквівалентною їй, при єдиній необхідній і достатній умові - рівності їх передавальних функцій
• В конструкторській документації схеми автоматизації кодуються буквами і цифрами в залежності від виду і типу схеми.
| Вид схеми | Шифр | Тип схеми | Шифр |
| Електрична | Е | 1. Структурна | |
| Гідравлічна | Г | 2. Функціональна | |
| Пневматична | П | 3. Принципова (повна) | |
| Кінематична | К | 4. З'єднань (монтажна) | |
| Оптична | Л | 5. Підключення | |
| Вакуумна | В | 6. Загальна | |
| Газова | Х | 7. Розташування | |
| Автоматизації | А | 8. Інші | |
| Комбінована | С | 9. Об'єднана |
| Елемент схеми – складова частина схеми, яка виконує певну функцію у виробі і не може бути розділена на частини, які мають самостійне функціональне призначення (резистор, трансформатор, насос-розподільник, муфта та ін.). |
| Пристрій – сукупність елементів, що являє собою єдину конструкцію (блок, шафа, механізм). Пристрій може не мати у виробі певного функціонального призначення. |
| Функціональна група – сукупність елементів, що виконують у виробі певну функцію і не об'єднані в єдину конструкцію. |
| Функціональна частина – елемент, пристрій, функціональна група. |
| Функціональне коло – лінія, канал, тракт певного значення (канал звуку, тракт ПВЧ та ін.) |
| Лінія взаємозв'язку – відрізок лінії, що вказує на наявність зв’язку між функціональними частинами виробу. |
| Установка – умовне найменування об’єкта в енергетичних спорудах, на який випускається схема, наприклад головні (силові) кола. |
Умовні позначення
• Динамічні ланки, а також перетворювачі функціональні, зображають прямокутником, всередині якого записують передатну функцію (вхід і вихід розташовують на одній прямій):
x(s) y(s)




Вхід вихід
• Динамічні ланки з’єднують між собою стрілками, які відповідають напрямку передачі сигналу від однієї ланки до іншої:
g(s) u(s) y(s)





•  Сигнал, що передається від однієї ланки до іншої позначається стрілкою з вказівкою напрямку передачі сигналу:
Сигнал, що передається від однієї ланки до іншої позначається стрілкою з вказівкою напрямку передачі сигналу:
• Ланки, які порівнюють, і ланки, які сумують (суматори) позначаються кружком, розділеним на сектори.
• Якщо сектор залитий чорним кольором, то сигнал, що надходить у цей сектор віднімається. Якщо сектор без заливки – сигнали складаються.
| Ланка порівняння | Суматор | ||||||||||||||||||||

|

|



• Вузол позначається жирною крапкою на перетині відповідних зв'язків.
х х

х
• Вузол відповідає розгалуженню сигналів. У вузлі стрілка відгалужується від іншої стрілки.
• Структурна схема графічно відображає математичну модель системи.
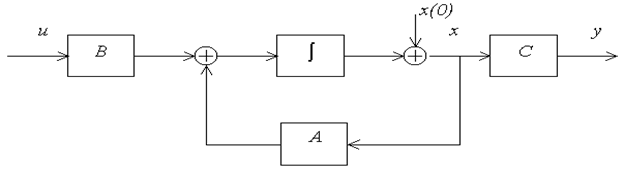
Приклад.
Покажемо схему системи, що задана моделлю ВСВ:
 .
.
З першого рівняння отримаємо (після інтегрування):
 ,
,  .
.
Правила перетворення
Правила перетворення структурних схем випливають із відповідності передавальних функцій.
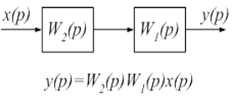
• 1. Послідовне з’єднання ланок.


 u
u 

 y
y








Передавальна функція послідовного з'єднання дорівнює добутку вихідних передавальних функцій:
U y




• 2. Паралельне з’єднання ланок.
    
       


   
|
Передавальна функція паралельного з'єднання дорівнює сумі вихідних передавальних функцій:
 Вихідний і вхідний сигнали пов’язані:
Вихідний і вхідний сигнали пов’язані:

|
• 3. Зустрічно-паралельне з’єднання
 u y u y
    
±
| Передавальна функція зустрічно-паралельного з'єднання дорівнює:
 .
Вихідний і вхідний сигнали пов’язані: .
Вихідний і вхідний сигнали пов’язані:
 (p) (p) 
| |||
 u y u y
 
|


• 4. Перенесення суматора через ланку
 |
     x1 x
±
x2 x1 x
±
x2
X2 |      x1 x3 x1 x3

 ± ±
x2 | ||||||||||||||||||||||
  x1 x1
x2
x2 |

 ±
±




 ±
±
• 5. Перенесення вузла через ланку
x1
| 
   x1 x2 x1 x2
x1 | ||||||
 x1 x2 x1 x2
  
x2 |  x1 x2 x1 x2
     x2
x2
|



 x1 x2
x1 x2


| Перестановка вузлів |  x3 x3
 x1 x2
x1 x2

|     x3
x1 x2 x3
x1 x2

|
| Перестановка суматорів | 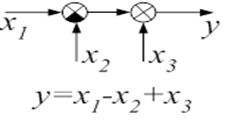
| 
|
| Перестановка ланок | 
| 
|