 2013-12-28
2013-12-28 1421
1421Это круг с центром в полюсе освещения светила. Полюсом освещения (а) называется проекция светила наземную поверхность (см. рис. 3.1).
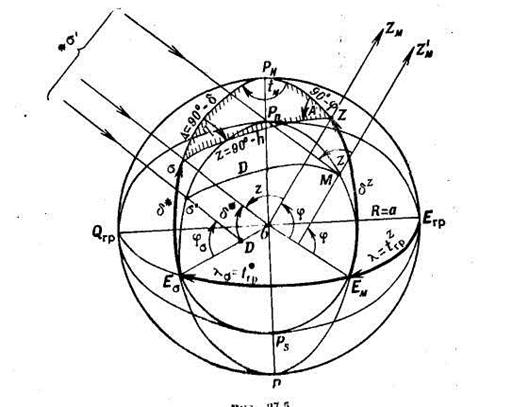 |
Кругов равных высот с центром в точке а. может быть бесчисленное множество и каждый соответствует определенной высоте. Все эти круги расположены между полюсом освещения, где высота равна 90° и большим кругом ее, где высота равна 0°.
Сферический радиус круга равных высот равен 90°-й. Координаты полюса освещения связаны с экваториальными координатами светила соотношениями:
φa=δ, λа =t гР, (3.1)
т.е. географические координаты полюса освещения равны координатам первой экваториальной системы светила на гринвичском меридиане.
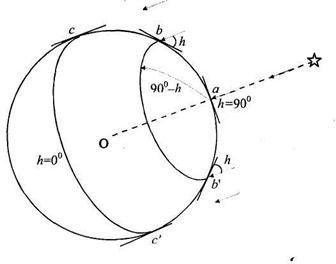 Рис. 3.1.
Рис. 3.1.
Таким образом, если знать координаты полюса освещения (их можно рассчитать с помощью МАЕ) и величину 90°- h (ее можно определить с помощью секстана), возникает принципиальная возможность построения круга равных высот на земном глобусе. Построив круг равных высот, можно утверждать, что судно находится где-то на нём.
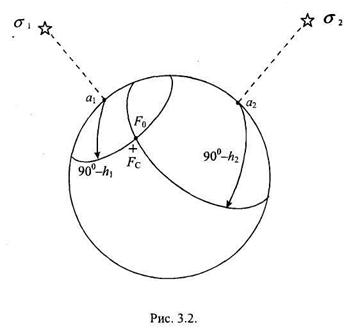
Для того, чтобы локализовать место на круге, надо проделать такую же операцию с другим светилом и построить второй круг равных высот. Пересечение двух кругов даст две точки, одна из которых является обсервованным местом судна, как это показано на рис. 3.2.
Выбрать из двух точек нужную можно либо с помощью счислимой точки (на рис 3.2 точка Fc), либо с помощью азимута одного из светил. В точках пересечения азимуты разные и пеленг на светило поможет выбрать нужную точку.
Координаты точки Fo, снятые с глобуса, и будут обсервованными координатами.
чтооы соблюсти требуемую в судовождении точность получения координат, построение необходимо выполнять, по крайней мере, в масштабе: 1 миля в 1 мм. Для этого потребовался бы глобус диаметром 6,9 м. Поэтому такое графическое решение задачи нереально.
Можно попытаться решить задачу аналитически. Для этого надо записать уравнения кругов для двух светил и решить эту систему уравнений относительно φо и λо.
Уравнение круга равных высот связывает высоту светила, его экваториальные координаты и координаты судна. Оно приведено в разделе 1.2 формулой (1.1). Если в этой формуле принять часовой угол t местным часовым углом t м, который равен t rp ± λEw, а высоту h - обсервованной высотой h0, в правой части получим обсервованные координаты.
Тогда для двух светил можем записать два следующих уравнения кругов равных высот:
 В этой системе два неизвестных: φ0 и λо -
В этой системе два неизвестных: φ0 и λо -
Такая система в принципе решается, но уравнения трансцедентные, т.е. корни не выражаются в виде простых алгебраических выражений. Систему (3.2) можно решить либо методом итераций, т.е. методом последовательных приближений, либо с помощью сложных преобразований формул с заменой неизвестных.
Итерационный метод решения системы (3.2) при наличии персональных компьютеров или программных калькуляторов не представляет особых затруднений, но они появились сравнительно недавно и исторически решение задачи пошло по «графическому пути», но с радикальным
изменением: построение стали делать не из центра круга (из полюса освещения),
а от счислимой точки и строить стали не окружность, а касательную к окружности вблизисчислимой точки. Учитывая малую кривизну круга равных высот (радиус составляет сотни и тысячи миль) в пределах ошибоксчисления такая замена вполне возможна.
Касательная к кругу равных высот вблизи счислимого места называется высотной линией положения (ВЛП). Таким образом, место по высотам небесных светил получается на пересечении ВЛП.
Следует заметить, что в редких случаях, когда радиус круга равных высот небольшой, т.е. полюс освещения и место судна находятся на одной путевой карте, можно использовать графический метод в чистом виде: наносить на карту полюса освещения, рассчитывать радиусы, равные 90°- h, и циркулем строить круги равных высот. Так поступают в тропиках, когда высота Солнца больше 88° (радиусы кругов менее 120 миль).
3.2. Высотная линия положения
Поясним идею построения ВЛП от счислимой точки. Допустим, измерена и исправлена высота какого-либо светила hо. Этой высоте на земной поверхности будет соответствовать круг обсервованной высоты.
На рис. 3.3 фрагмент этого крута вблизи счислимой точки Fqобозначен буквами bb'. Как было показано в предыдущем параграфе, кругов равных высот бесчисленное множество и один из них проходит через счислимую точку. Высота, соответствующая этому кругу, называется счислимой высотой h с. Фрагмент круга счислимой высоты сс ' показан на рис. 3.3.
В курсе математических основ судовождения доказывается, что при изменении высоты светила нанекоторое количество дуговых минут круг равных высот перемещается по земной поверхности на такое же количество морских миль. Следовательно, расстояние между кругами счислимой и обсервованной высот равно h0 - hс миль. Эта разность называется переносом р

Из рис. 3.3 также следует, что расстояние между кругами равно (900- h с) –(900- h о) = h о- h с.
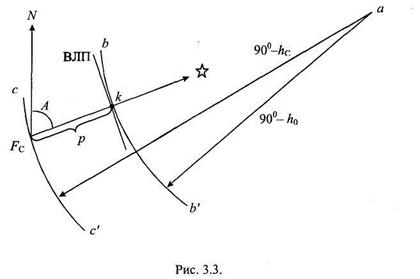
Расстояние между концентрическими окружностями измеряется по радиусу, который направлен от любой точки окружности к центру. Таким образом, если при счислимой точке Fq построить направление на полюс освещения (азимут светила) и по нему отложить перенос, мы получим одну из точек круга обсервованной высоты. На рис. 3.3 это точка к. Она называется определяющей точкой. Так как касательная к окружности перпендикулярна к радиусу, то проведя в определяющей точке перпендикуляр к направлению на светило, получим ВЛП.
Из вышесказанного следует, что для построения ВЛП необходимо на карте иметь счислимую точку, знать азимут светила и перенос.
Высотная линия положения играет ключевую роль в астрономическом определении места судна.








