 2018-02-14
2018-02-14 542
542
Програму керування складено в вигляді функціонального плану. Всю програму можна умовно розділити на кілька частин. На рис. 3.2 показано алгоритм, за яким при ввімкненні контролера система наведення повинне повернутися в початкове положення.

Рис. 3.2. Алгоритм повернення система наведення в початкове положення
Коли система наведення повернеться в початкове положення, слід зчитати координати на. Алгоритм такого зчитування показано на рис. 3.5.

Рис. 3.3. Алгоритм введення координат точок траєкторії
Цикл наведення, що складається з ввімкнення таймерів, наведення установки за задиними координатами та перевірки умови кінця циклу, представлено на рис. 3.4.

Рис. 3.4. Цикл наведення
Ці алгоритми, об’єднані в одну кінцеву програму, показано на рис. 3.5.
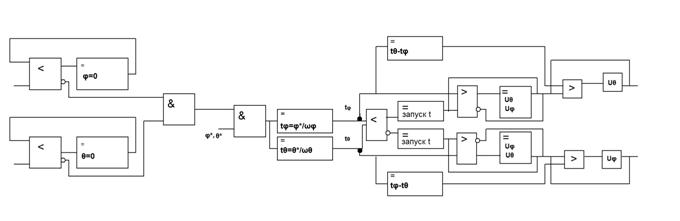
Рис. 3.5. Програма керування, записана в контролер
РОЗДІЛ 4
ТЕХНІЧНА РЕАЛІЗАЦІЯ,НАЛАГОДЖЕННЯ ТА ВИПРОБУВАННЯ ЛАБОРАТОРНОЇ УСТАНОВКИ








