 2020-01-14
2020-01-14 165
165На рис. 4.4.1 изображена математическая модель цифровой системы управления с АЦП. Здесь W 0(p) — передаточная функция объекта, k д — коэффициент передачи датчика, k у — коэффициент передачи усилителя, УСО — устройство сопряжения с объектом.

Рис. 4.4.1. Математическая модель цифровой системы управления
Однако эта модель не учитывает работу дискретных элементов управления. Используем для описания кодовых сигналов un и yn дискретное преобразование Лапласа. Для этого заменим аналого-цифровой преобразователь импульсным ключом, который формирует из исходного непрерывного сигнала u y(t)модулированную последовательность d-импульсов u *(t), следующих с периодом T М. В комплексной области этой последовательности соответствует изображение U *(z), где z =  — комплексная переменная, зависящая от оператора Лапласа «p».
— комплексная переменная, зависящая от оператора Лапласа «p».
Поскольку вычислительное устройство реализует ПИ-закон управления, то его импульсная передаточная функция имеет вид:
W ВУ(z) = k П +  . (1)
. (1)
Здесь k П — коэффициент передачи пропорциональной части, k И — коэффициент передачи интегральной части ВУ.
Найдем теперь рекуррентное уравнение, описывающее работу ВУ в реальном времени.
Поскольку
W ВУ(z) =  , (2)
, (2)
где Y *(z) — комплексное изображение модулированного по времени выходного сигнала y (t), то мы имеем:
 = k П + .
= k П + .
Отсюда получаем:
(z – 1) · Y *(z) = [ k П(z – 1) + k И T М z ] · U *(z),
или
zY *(z) – Y *(z) = (k П + k И T М) zU *(z) – k П U *(z).
Перейдем теперь из комплексного пространства Z к дискретной вещественной переменной tn = nT М, где n — номер цикла работы ВУ. Для этого используем соотношения:
zY *(z) yn + 1;
Y *(z) yn; (3)
zU *(z) un + 1;
U *(z) un.
В результате имеем:
yn + 1 – yn = (k П + k И T М) un + 1 – k П un,
или
yn + 1 = yn + k И T М un + 1 + k П(un + 1 – un). (4)
Формула (4) описывает алгоритм работы вычислительного устройства с ПИ-законом управления, имеющего передаточную функцию (1). На выходе вычислительного устройства действует гипотетическая последовательность d-импульсов y *(t). Эти модулированные d-импульсы можно преобразовать в физический сигнал с помощью формирующего устройства, имеющего передаточную функцию:
W ФУ(p) =  . (5)
. (5)
Такое устройство преобразует каждый d-импульс в последовательности y *(t) в прямоугольный импульс, имеющий длительность T М и амплитуду yn. На рис. 4.4.2 показана математическая модель цифровой системы управления с импульсным ключом.
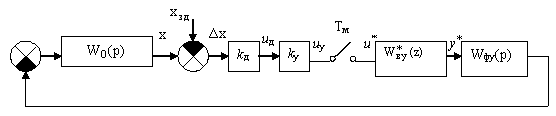
Рис. 4.4.2. Математическая модель цифровой системы управления
с импульсным ключом
Приведем теперь входной сигнал x зад(t) к входу импульсного ключа, т. е.:
u зад(t) = k д k у x зад(t). (6)
В комплексной области этому сигналу соответствует изображение  . Непрерывные элементы системы управления можно объединить в передаточную функцию:
. Непрерывные элементы системы управления можно объединить в передаточную функцию:
W н(p) = W 0(p) k д k у . (7)
Для передаточной функции непрерывной части можно найти импульсную передаточную функцию:
 = [ W н(p)]*. (8)
= [ W н(p)]*. (8)
В результате мы получаем математическую модель приведенной цифровой системы управления, которая изображена на рис. 4.4.3.
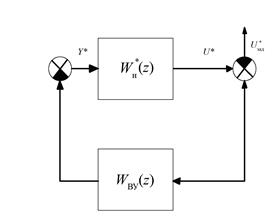
Рис. 4.4.3. Математическая модель приведенной цифровой системы управления
Импульсный ключ на этой модели не показан, поскольку здесь действуют только модулированные сигналы.








