 2020-01-14
2020-01-14 124
124Моделирование непрерывной системы управления объектом
С помощью программы Matlab и Simulink Library Browser установим новую панель для моделирования системы, затем наберем на данной панели математическую модель замкнутой системы управления непрерывным технологическим объектом, изображенную на рис. 5.1.1. Для этой системы установим значения T 0 = 54 с и k 0 = 0,45 согласно варианту; k п = 5,185 и k и = 0,229 1/с согласно расчетам (см. п. 4.1).

Рис. 5.1.1. Модель замкнутой системы управления непрерывным технологическим объектом
Запустим модель, затем получим ее характеристики и сравним их с результатами, полученными в расчетной части работы (см. п. 4.2).
| Модель замкнутой системы управления непрерывным технологическим объектом | |
| Переходная характеристика | |
| Результаты расчета | Результаты моделирования |

|  Осциллограф
Осциллограф
|
| t рег = 97,2 с, s = 12 % | 
|
 Нули и полюса
Нули и полюса
| 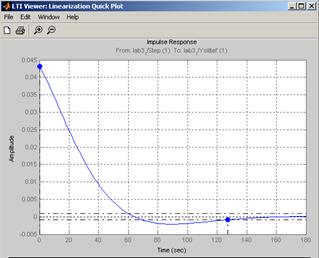 Импульсная характеристика
Импульсная характеристика
|
Моделирование разомкнутой непрерывной системы управления технологическим объектом
На рис. 5.2.1. представлена модель разомкнутой непрерывной системы управления технологическим объектом.

Рис. 5.2.1. Модель разомкнутой непрерывной системы управления технологическим объектом
С помощью осциллоскопа и LTI-Viewer получим переходную, импульсную и логарифмические частотные характеристики.
| Модель разомкнутой непрерывной системы управления технологическим объектом | |
 Переходная характеристика, полученная с помощью модуля LTI-Viewer
Переходная характеристика, полученная с помощью модуля LTI-Viewer
|  Переходная характеристика, полученная с помощью осциллоскопа
Переходная характеристика, полученная с помощью осциллоскопа
|
| Результаты расчета | Результаты моделирования |
 
| 
|








