 2020-01-14
2020-01-14 396
396Устойчивость цифровой системы управления исследуется по характеристическому полиному:
A (z) = z 2 + a 1 z + a 0, (1)
представляющему собой знаменатель импульсной передаточной функции замкнутой системы.
В устойчивой системе корни z 1 и z 2 характеристического уравнения:
z 2 + a 1 z + a 0 = 0, (2)
должны располагаться внутри единичной окружности, график которой показан на рис. 4.6.1. На этой окружности вещественная точка 1 соответствует границе апериодической устойчивости (z = 1), вещественная точка 2 — границе колебательной устойчивости с периодом колебаний Tk = 2 T M (z = –1), а комплексные дуги 3 соответствуют границам колебательной устойчивости с периодом колебаний T k > 2 T M (mod z = 1).

Рис. 4.6.1. Область устойчивости цифровой системы управления
на комплексной плоскости Z
Граница апериодической устойчивости, при z = 1 в характеристическом уравнении:
 .
.
Границу колебательной устойчивости с периодом колебаний Тк = 2Тм можно получить, положив z = -1:  .
.
Колебательную границу устойчивости при Тк > 2Тм можно найти, приняв mod z = 1.
Запишем для этого комплексные значения корней:
 . (3)
. (3)
Тогда модуль будет равен:
 , (4)
, (4)
или 
Отсюда имеем уравнение границы устойчивости:  .
.
Уравнения границ устойчивости образуют на плоскости {  ,
,  } треугольник устойчивости.
} треугольник устойчивости.
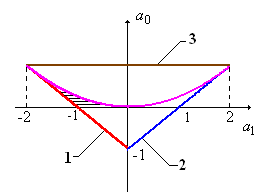
Рис.4.6.2. Область устойчивости цифровой системы на плоскости параметров а1 и а0.
Переходная характеристика системы будет апериодической, если выполняются условия:
 (5)
(5)
Отсюда получим график границы апериодической устойчивости:  при a1<0.
при a1<0.
Область апериодической настройки цифровой САУ выделена на рис.4.6.2 штриховкой.
ЛАЧХ и ЛФЧХ цифровой системы управления
Расчет переходной характеристики цифровой системы управления следует производить по рекуррентной формуле:
 , (6)
, (6)
при следующих начальных условиях:
 ,
,
 , где
, где  =1.
=1.
Частота дискретизации:
|
|

|
|
 рад/с
рад/с
Дискретная передаточная функция:
|
|
(7)
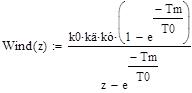
Дискретная передаточная функция ПИ-регулятора:
|
|
(8)
Дискретная передаточная функция разомкнутой СУ:
|
|

(9)
Частотные характеристики цифровой СУ:
|
|

|
|

(10)
(11)
|
|

(12)
На рис.4.6.3 и 4.6.4 показаны графики логарифмических амплитудно-частотных характеристик цифровой системы с графиком ЛАЧХ непрерывной системы, и графики ЛФЧХ цифровой и непрерывной СУ.
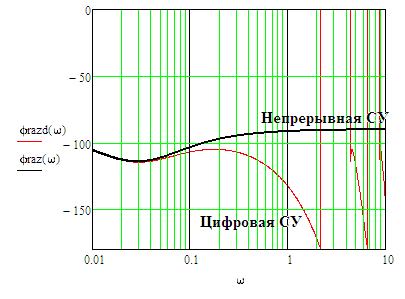
Рис.4.6.3. График ЛФЧХ цифровой и непрерывной СУ технологическим объектом.
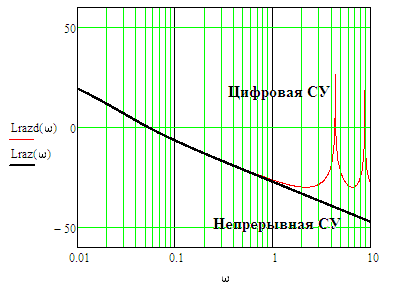
Рис.4.6.4. График ЛАЧХ цифровой и непрерывной СУ технологическим объектом.
4.7. Исследование устойчивости системы для Tm1=Tm, Tm2=5Tm, Tm3=10Tm, Tm4=20Tm.
1. Tm1=Tm
|
|
|
|

|
|
|
|
(1)
|
|
|
|
(2)
|
|
|
|

|
|
|
|

(3)
(4)
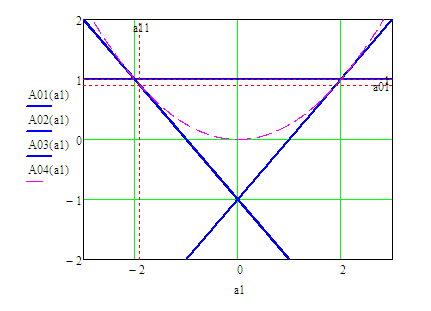
Рис.4.7.1. Положение точки [а11;а01] на плоскости параметров цифровой системы управления при Тm1=Tm
2. Tm2=5Tm
|
|
|
|
|
|

|
|
|
|
 1/с
1/с|
|
|
|

(5)
(6)
(7)
(8)

Рис.4.7.2. Положение точки [а12;а02] на плоскости параметров цифровой системы управления при Тm2=5Tm
3. Tm3=10Tm
|
|
|
|

|
|
|
|
 1/с
1/с|
|
|
|
|
|
(9)
(10)
(11)
(12)
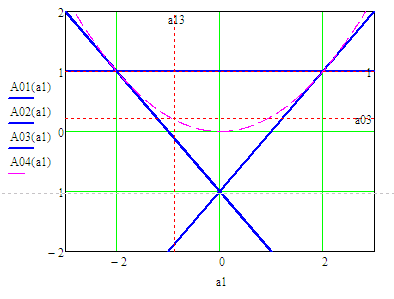
Рис.4.7.3. Положение точки [а13;а03] на плоскости параметров цифровой системы управления при Тm3=10Tm
4. Tm4=20Tm
|
|
|
|
|
|

|
|
|
|
 1/с
1/с|
|

|
|
(13)
(14)
(15)
(16)
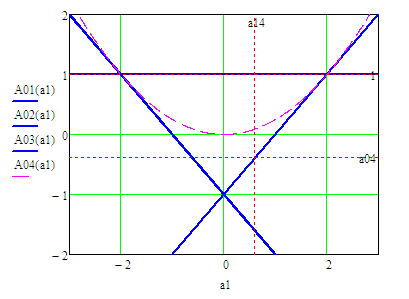
Рис.4.7.4. Положение точки [а14;а04] на плоскости параметров цифровой системы управления при Тm4=20Tm
|
|

Графики уравнений:
|
|

|
|

|
|

образуют на плоскости треугольник устойчивости, который изображен выше. На этой плоскости устойчивой системе соответствует точка с координатами {a1i,a0i}.
Расчет переходной характеристики цифровой системы управления для 
 , (17)
, (17)
 , (18)
, (18)
 (19)
(19)
График переходной характеристики цифровой системы управления имеет вид:
|
|
|
|

|
|

|
|

|
|

|
|
|
|

(20)
(21)
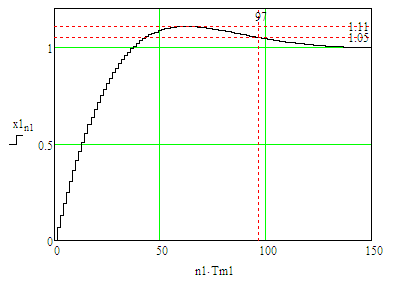
Рис. 4.7.5. Переходная характеристика цифровой системы при 
Показатели качества цифровой системы управления, работающей в дискретном режиме:
1) время регулирования:
 с.
с.
Максимальное значение, которое достигла переходная характеристика равно:
 .
.
2) значение перерегулирования равно:
 ; (22)
; (22)
при  .
.
Расчет переходной характеристики цифровой системы управления для 
|
|

|
|
|
|

|
|

|
|

(23)
(24)
| Перерегулирование: |

|
|

|
|

(25)
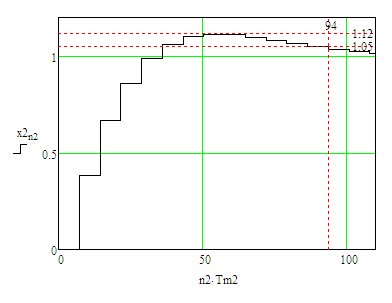
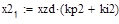
Рис. 4.7.6. Переходная характеристика цифровой системы при 
Показатели качества цифровой системы управления, работающей в дискретном режиме:
1) время регулирования:
| |
 с
с
Максимальное значение, которое достигла переходная характеристика равно:
 .
.
2) значение перерегулирования равно:
 ; (26)
; (26)
при  .
.
Расчет переходной характеристики цифровой системы управления для 
| |

| |
|
|
| |

| |

(27)
(28)
Рис. 4.7.7. Переходная характеристика цифровой системы при
Показатели качества цифровой системы управления, работающей в дискретном режиме:
1) время регулирования:
 с.
с.
Максимальное значение, которое достигла переходная характеристика равно:
 .
.
2) значение перерегулирования равно:
 ; (29)
; (29)
при  .
.
Переходная характеристика цифровой системы управления для 
| |

| |
|
|
| |

| |

| |

(30)
(31)
| |
|
|

|
|

(32)
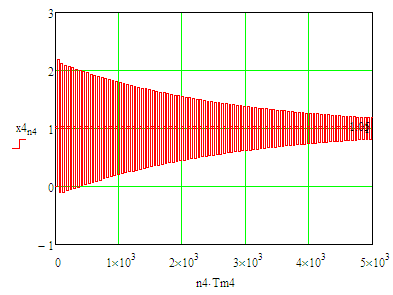
Рис. 4.7.8. Переходная характеристика цифровой системы при
Таким образом, данные об устойчивости системы, полученные с помощью переходных характеристик, совпадают с данными, полученными с помощью области устойчивости системы.
4.8. Исследование системы на бесконечную степень устойчивости 
Определим значения безразмерных параметров цифровой системы, которые обеспечивают ее настройку на бесконечную степень устойчивости.
|
|
|
|

|
|
 с
с|
|

|
|

|
|

|
|
 1/с
1/с(33)
(34)
(35)
|
|
|
|

|
|

|
|

|
|

|
|

|
|

|
|

(36)
(37)
(38)
(39)

Рис.4.8.1. Переходная характеристика цифровой системы при 
Коэффициенты передачи цифрового ПИ-регулятора, настроенного на бесконечную степень устойчивости.
|
|
|
|

|
|
|
|
 1/с
1/с
(40)
(41)








