 2020-01-14
2020-01-14 186
186С помощью программы Matlab и Simulink Library Browser, установим новую панель для моделирования системы, затем наберем на данной панели математическую модель замкнутой цифровой системы непрерывным технологическим объектом, изображенную на рис. 5.5.1.
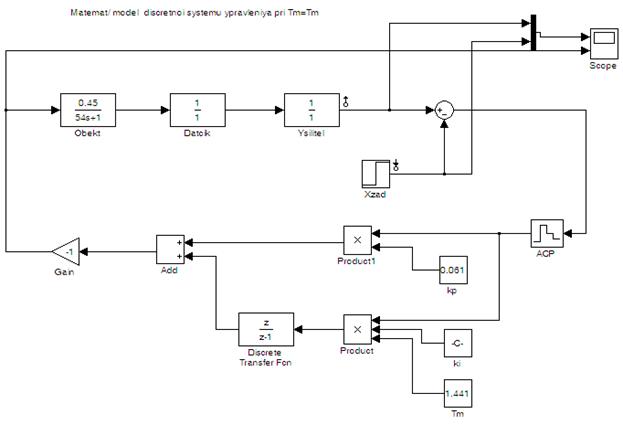
Рис. 5.5.1. Математическая модель дискретной системы управления при Тм = 1,441с
Запустим модель, затем получим ее характеристики и сравним их с результатами, полученными в расчетной части работы.
| Математическая модель дискретной системы управления | ||||
| Результаты отчета | Результаты моделирования | |||
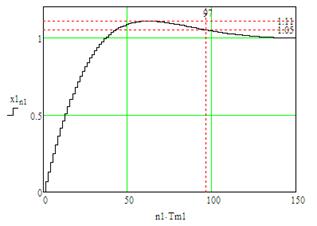
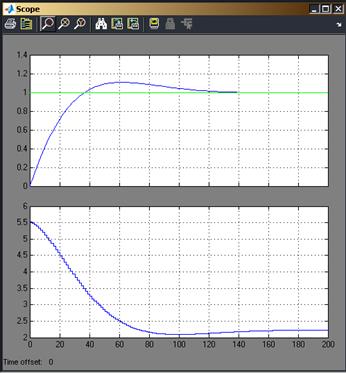
| Переходная характеристика | ||||
|
|
| |||
| t рег = 97,2 с, s = 11 % |
| |||
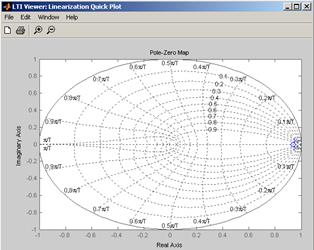
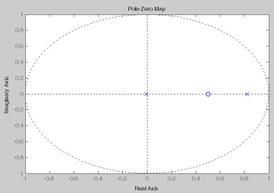
| Нули и полюса
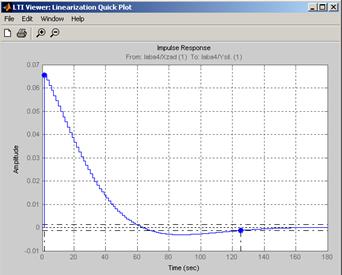
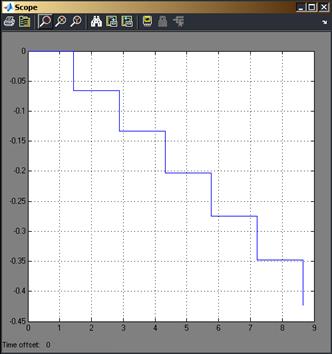
| Импульсная характеристика
| |||
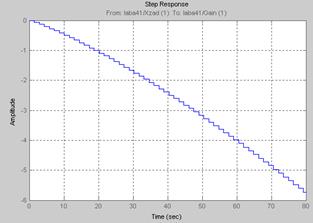
Математическая модель разомкнутой дискретной системы управления представлена на рис. 5.6.1.
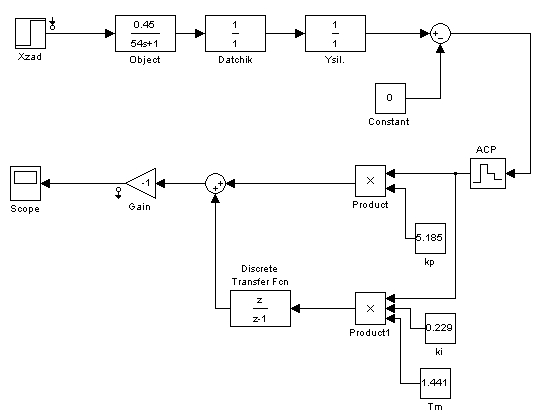
Рис. 5.6.1. Математическая модель разомкнутой дискретной системы управления
| Математическая модель разомкнутой системы управления | |
| Результат расчета | Результат моделирования |
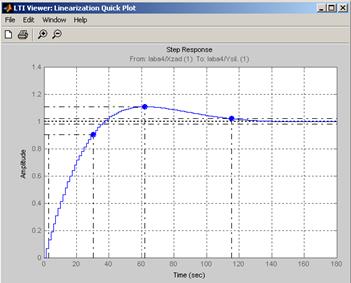
| Переходная характеристика | |
| 
|
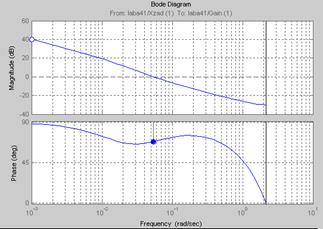
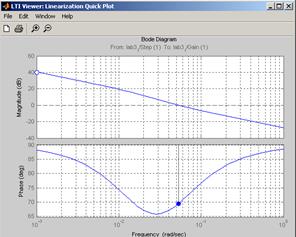
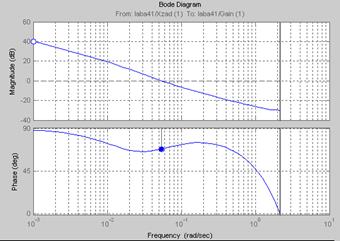 ЛАЧХ и ЛФЧХ ЛАЧХ и ЛФЧХ
| |
Сравним ЛАЧХ и ЛФЧХ для разомкнутой цифровой системы управления и разомкнутой непрерывной системы управления.
| Логарифмическая частотная и фазовая характеристики | |
| Цифровая система | Непрерывная система |
| 
|
Таким образом, в области низких и средних частот форма ЛАЧХ идентична, а в области высоких частот они значительно различаются. Для ЛФЧХ совпадение характеристик наблюдается лишь в области низких частот.
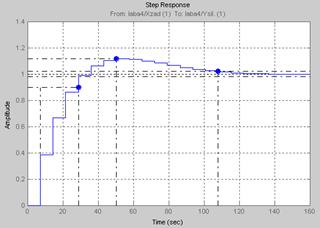
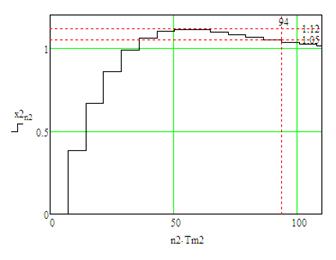
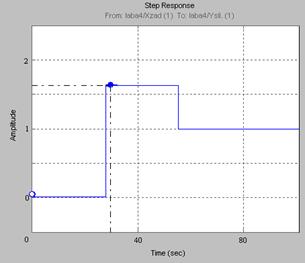
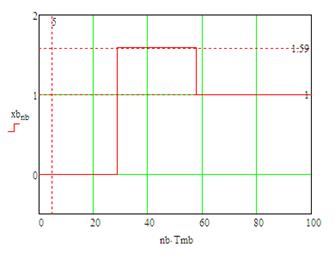
Получим переходные характеристики цифровой системы управления для различных Т м и сравним их с результатами расчетов.
| Результаты моделирования | Результаты расчета |
| Характеристики модели дискретной системы управления при | |
| 
|
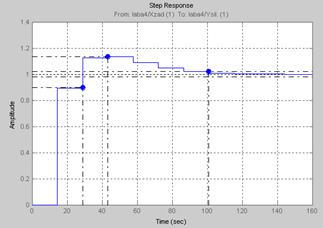
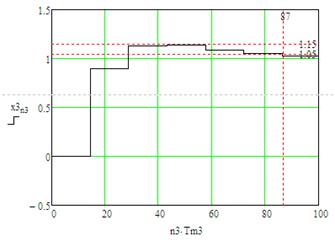
| Характеристики модели дискретной системы управления при | |
| 
|
| Характеристики модели дискретной системы управления при | |
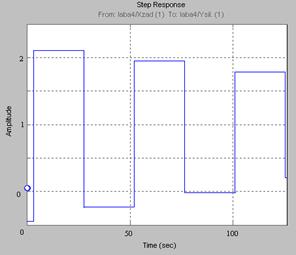
| 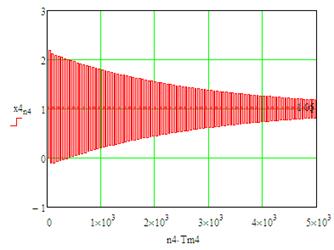
|
 = 5 • Т м = 7,205 с
= 5 • Т м = 7,205 с = 10 • Т м = 14,41 с
= 10 • Т м = 14,41 с = 20 • Т м = 28,82 с
= 20 • Т м = 28,82 с
Согласно приведенным данным, переходные характеристики для расчета и для моделирования совпадают, что доказывает правильность расчетов.
Установим параметры настройки дискретного ПИ-регулятора на бесконечную степень устойчивости: k п = 3,151; k и = 0,186 1/с.
| Характеристики системы с настройкой ПИ-регулятора | |
| Весовая функция | Переходная характеристика |
| 
|
| Нули и полюса | |
| |
Заключение
В рамках курсового проекта была разработана система автоматического регулирования температурой клея в машине КБС.
Были получены характеристики для непрерывной системы, системы с чистым запаздыванием и цифровой системы управления. Получены оптимальные коэффициенты настройки ПИ-регулятора: k и = 0,229 1/с, k п = 5,185. Рассчитано время модуляции Т м = 1,441 с. Построены ЛАЧХ и ЛФЧХ непрерывной системы со звеном чистого запаздывания, по ним определены запасы устойчивости: D L = 54,893 дБ, g = 66°. Проведен анализ устойчивости цифровой системы управления для различных времен моделирования, установлено, что при времени моделирования больше, чем 10 T м, система становится менее устойчивой. Проведена оценка настройки системы на бесконечную степень устойчивости.
В рамках работы проведено моделирование с помощью пакета Simulink системы MatLab. Сопоставление результатов моделирования с результатами расчета показало их совпадение.
Список литературы
1. Автоматизация технологических процессов и производств. Задания и методические указания по выполнению курсовой работы для специальности 220301 — «Автоматизация технологических процессов и производств». Сост. Ю. В. Щербина. — М.: МГУП, 2006.
2. Агеев В.Н. и др. Методические рекомендации по выполнению квалификационных работ, курсовых и дипломных проектов для студентов, обучающихся по специальности 210100 «Управление и информатика в технических системах» и направлению 550200 «Автоматизация и управление». – М.:МГУП, 2003.
3. Дроздов В. Н. Автоматизация технологических процессов в полиграфии: учеб. пособие / В. Н. Дроздов. — М.: Изд-во МГУП, 2006. — 252 с.
4. Ефимов М. В., Толстой Г. Д. Автоматизация технологических процессов в полиграфии: Учебник. — М.: Книга, 1989.
5. Клюев А.С., Глазов Б.В., Дубровский А.Х., Клюев А.А. Проектирование систем автоматизации технологических процессов: справочное пособие. – М.: Энергоатомиздат, 1990
Интернет-источники
1. http://www.upnn.ru/ru/catalogue/3/7
2. http://www.ukr-print.net/contents/page-825.htm
3. http://www.ukr-print.net/contents/page-825.htm
[1] http://www.upnn.ru/ru/catalogue/3/7
[2] http://www.ukr-print.net/contents/page-825.htm
[3] http://fdialog.ru/profpolygraf/rzd255/profpolygraf
[4] http://www.upnn.ru/ru/catalogue/3/7
[5] http://www.ukr-print.net/contents/page-825.htm
[6] Щербина Ю.В. Автоматизация технологических процессов и производств. М.:МГУП,2006
[7] Каталог продукции ОВЕН, 2004
[8] Каталог продукции ОВЕН, 2004
[9] Каталог продукции ОВЕН, 2004
[10] Каталог продукции ОВЕН, 2004
[11] Каталог продукции ОВЕН, 2004
[12] Каталог продукции ОВЕН, 2004








