 2020-01-14
2020-01-14 145
145
2.1 Постановка задачи
Объект описан дифференциальным уравнением:
Требуется:
1. Записать модель объекта в пространстве состояний.
2. Записать модель объекта в форме передаточной функции.
3. Получить частотные характеристики объекта.
2.2 Математическая постановка задачи
Рассмотрим систему автоматического управления (САУ), описываемую линейным (линеаризованным) дифференциальным уравнением вида:
 (2.1)
(2.1)
где u(t) – входной процесс, y(t) – выходной процесс, ai, bj – постоянные коэффициенты, n, m (n>m)– постоянные числа. В операторной форме выражение (2.1) может быть записано  .
.
Здесь D – оператор дифференцирования  . Отсюда преобразование “вход-выход” системы:
. Отсюда преобразование “вход-выход” системы:
где W(D) называется операторной передаточной функции.
Один из способов моделирования систем заключается в представлении преобразования “вход-выход” в виде комплексной передаточной функции:
которая получается путем применения преобразования Лапласа к (2.2) ри начальных нулевых условиях. Здесь s-комплексная переменная. Связь между операторной (2.2) и комплексной (2.3) передаточными функциями можно записать в виде:
Комплексные числа, являющиеся корнями многочленаВ(s), называются нулями передаточной функции, а корни многочлена A(s) – полюсами.
Явный вид связи входа и выхода определяется выражением:
где w(t) – оригинал (т.е. полученный с помощью обратного преобразования Лапласа) комплексной передаточной функции W(s).
Динамические свойства систем характеризуют реакции на входные воздействия специального вида. В частности анализ выхода системы на единичный скачок и d-функцию (дельта-функцию).
Пусть u(t) = 1(t), то есть на вход системы подается функция Хевисайда (единичный скачок), определяемая:
График функции Хевисайда приведен на рис. 2.1а:
 а)
а)
 б)
б)
Рис.2.1. Функции Хевисайда (а) и Дирака (б)
Реакция САУ на единичный скачек называется переходной функцией системы и обозначается h(t).
Если u(t) = d(t), то есть на вход системы поступает функция Дирака (d-функция, импульсная функция, рис. 2.1б) определяемая:
то реакция САУ называется импульсной переходной функцией системы и обозначается w(t). Таким образом оригинал комплексной передаточной функции можно измерить как реакцию систему на импульс.
Импульсная и переходная функции системы связаны соотношением:
Благодаря широкому применению при исследовании устойчивости динамических систем и проектировании регуляторов получили распространение частотные характеристики.
Пусть на вход системы с передаточной функцией W(s) подается гармонический сигнал u(t) = aucos(wt), t>0. В этих условиях справедлива следующая теорема:
Если звено является устойчивым, то установившаяся реакция y(t) на гармоническое воздействие является функцией той же частоты с амплитудой ay = au |W(iw)| и относительным сдвигом по фазе y = argW(iw).
Таким образом, выход определяется гармонической функцией
y(t) = au |W(iw)| cos(w t + argW(iw)),(2.9)
где i – комплексная единица,  – частотная характеристика.
– частотная характеристика.
При фиксированном значении w частотная характеристика является комплексным числом, и, следовательно, может быть представлена в виде:
где  – амплитудно-частотная характеристика (АЧХ); – фазово-частотная характеристика (ФЧХ); – вещественная частотная характеристика (ВЧХ); – мнимая частотная характеристика (МЧХ).
– амплитудно-частотная характеристика (АЧХ); – фазово-частотная характеристика (ФЧХ); – вещественная частотная характеристика (ВЧХ); – мнимая частотная характеристика (МЧХ).
Геометрическое место точек W(iw) на комплексной плоскости при изменении w от w0 до от w1 (обычно w0 = 0, w1 =  ), называется амплитудно-фазовой характеристикой (АФХ) или частотным годографом Найквиста.
), называется амплитудно-фазовой характеристикой (АФХ) или частотным годографом Найквиста.
Имеет широкое практическое значение диаграмма Боде (логарифмическая амплитудная характеристика, ЛАХ), которая определяется как L = 20 lg A(w), измеряется в децибелах и строится как функция от lg w.
2.3 Результаты выполнения задания

Выполняем анализ с помощью пакета прикладных программ MatLab
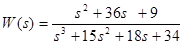
Передаточная функция имеет вид:
Полюса передаточной функции:
-13.8796
-0.5602 + 1.4614i
-0.5602 - 1.4614i
Нули передаточной функции:
-35.7482
-0.2518
При помощи команды step(w) строим переходную функцию h(t) рис2.2

Рис.2.2. Переходная функция h(t)
При помощи команды impulse(w) строитьсяимпульсная переходная функция w(t) рис2.3:

Рис. 2.3. Импульсная переходная функцияw(t)
При помощи команды bode(w) строим Диаграмму Боде рис 2.4:

Рис.2.4. Диаграмма Боде
АФХ системы он жегодограф НайквистаW(iw), строится при помощи команды nyquist(w):

Рис. 2.5. Годограф Найквиста
Текст расчетов в MatLab
>> w= TF([1,36,9],[1,15,18,34])
Transfer function:
s^2 + 36 s + 9
------------------------
s^3 + 15 s^2 + 18 s + 34
>>pole(w)
ans =
-13.8796
-0.5602 + 1.4614i
-0.5602 - 1.4614i
>>zero(w)
ans =
-35.7482
-0.2518
>>step(w)
>>impulse(w)
>>bode(w)
>>nyquist(w)
>>ltiview(w)

Рисунок 2.6 – Блок-схема программы исследования характеристик динамической системы








