 2020-01-14
2020-01-14 739
739
Так как степень подвижности механизма равна единице, то группа начального звена состоит из одного подвижного звена 1 и стойки 6 (рис. 3). Такая группа по классификации Ассура относится к 1-му классу, 1-му порядку.
С группой начального звена соединена группа Ассура 3-4 (рис. 4), состоящая из шатуна 3, ползуна 4 и трех кинематических пар 5-го класса. Эта группа относится к 1-му классу, 2-му порядку.
С группой начального звена также соединена группа Ассура 2-5 (рис. 5), состоящая из шатуна 2, ползуна 5 и трех кинематических пар 5-го класса. Эта группа относится к 1-му классу, 2-му порядку.

| 
| 
|
| Рис. 3. Группа начального звена. 1-ый класс, 1-ый порядок | Рис. 4. Группа Ассура 3-4. 1-ый класс, 2-ой порядок | Рис. 5. Группа Ассура 2-5. 1-ый класс, 2-ой порядок |
Класс и порядок механизма определяется классом и порядком наиболее сложной группы, входящей в его состав. Следовательно, данный механизм 1-го класса, 2-го порядка.
Кинематическое исследование рычажного механизма графо-аналитическим методом
Построение плана положений механизма
Масштабный коэффициент длин – это отношение истинной длины кривошипа ОА к длине отрезка в мм, изображающего его на чертеже. Приняв графическое значение длины кривошипа  = 35 мм, найдем значение Kl:
= 35 мм, найдем значение Kl: 
 .
.
Графические значения линейных размеров находятся как отношения истинных значений к значению масштабного коэффициента длин Kl:
 ;
;
 .
.
Имея графические значения линейных размеров (длин звеньев АВ и АВ'), строим план 6-ти положений механизма из одной общей точки О вращения кривошипа ОА, начиная с разбивки траектории движения точки А конца кривошипа на 6 равных частей. За 1-ое положение принято правое "мертвое" положение ползуна В. Методом засечек находятся положения всех звеньев механизма для каждого из 6-ти положений кривошипа. На плане положений показаны траектории центров тяжести звеньев АВ и АВ' – точек М и L.
План положений механизма показан на рис. 6 и на чертеже курсовой работы.

Рис. 6. План положений механизма
2.2 Построение плана скоростей механизма. Определение скоростей шарнирных точек, центров тяжести звеньев и угловых скоростей звеньев.
2.2.1 Угловая скорость вращения кривошипа определяется по формуле
 .
.
2.2.2 Линейная скорость точки А кривошипа равна
 .
.
2.2.3 Масштабный коэффициент скорости KV определяется как отношение истинного значения скорости точки А кривошипа к длине отрезка в мм, изображающего эту скорость на чертеже. Приняв графическое значение скорости  = 51,25 мм, найдем значение KV
= 51,25 мм, найдем значение KV
 .
.
2.2.4 Для определения скорости точки В составим векторное уравнение
 .
.
- Н ВН - Н
В этом уравнении два неизвестных, следовательно, оно решается графически.
Из плана скоростей находим графические значения скорости точки В и относительной скорости вращения точки В относительно точки А:  . Истинные значения этих скоростей равны:
. Истинные значения этих скоростей равны:
 ;
;  .
.
Для положения № 2:  ;
;  . Для остальных положений механизма значения скоростей VB и VBA приведены в табл. 1.
. Для остальных положений механизма значения скоростей VB и VBA приведены в табл. 1.
2.2.5 Скорость точки В' определяется аналогично из векторного уравнения
 ,
,
- Н ВН - Н
в котором также два неизвестных, следовательно, оно решается графически.
Из плана скоростей находим графические значения скорости точки В' и относительной скорости вращения точки В' относительно точки А:  . Истинные значения этих скоростей равны:
. Истинные значения этих скоростей равны:
 .
.
Для положения № 2:  ;
;  . Для остальных положений механизма значения скоростей VB' и VB'A приведены в табл. 1.
. Для остальных положений механизма значения скоростей VB' и VB'A приведены в табл. 1.
2.2.6 Определение скоростей центров тяжести звеньев:
 – для всех положений;
– для всех положений;
 ;
;  .
.
Для положения № 2:  ;
;  . Для остальных положений механизма значения скоростей VM и VL приведены в табл. 1.
. Для остальных положений механизма значения скоростей VM и VL приведены в табл. 1.
2.2.7 Определение скоростей точек В, В', М и L в особых ("мертвых") положениях механизма № 1 и № 4.
В этих положениях абсолютные скорости точек В и В' равны нулю
 ;
;  ,
,
поэтому относительные скорости VBA и VB'A численно равны скорости точки А, но имеют противоположное направление  ;
;  .
.
Скорости точек М и L в положениях механизма № 1 и № 4 будут равны
VM = VL = 2/3·VA = 2/3·5,125 = 3,42 м/с.
План скоростей для положения № 2 показан на рис. 7, а план скоростей для 6-ти положений механизма приведен на чертеже курсовой работы.
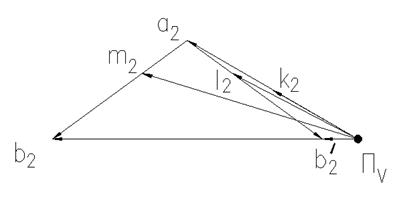
Рис. 7. План скоростей механизма для положения № 2
2.2.8 Определение угловых скоростей звеньев. Угловые скорости звеньев (1/c) определяются по уравнению
 .
.
Соответственно для звеньев AB и AB' получаем для положения № 2:
 ;
;
 .
.
Для остальных положений механизма значения угловых скоростей wAB и wAB' приведены в табл. 1.
Направления угловых скоростей звеньев AB и AB' определяются направлениями относительных скоростей VBA и VB'A.
В табл. 1 приведены значения линейных скоростей точек и угловых скоростей звеньев для 6-ти положений механизма.
Таблица 1
Действительные значения скоростей
| № положения | VA | VB | VB' | VBA | VB'A | VL | VM | wAB | wAB' |
| м/c | 1/c | ||||||||
| 1 | 5,125 | 0 | 0 | 5,125 | 5,125 | 3,42 | 3,42 | 34,2 | 34,2 |
| 2 | 5,125 | 7,96 | 0,92 | 4,35 | 4,35 | 3,69 | 5,87 | 29 | 29 |
| 3 | 5,125 | 0,92 | 7,96 | 4,35 | 4,35 | 5,87 | 3,69 | 29 | 29 |
| 4 | 5,125 | 0 | 0 | 5,125 | 5,125 | 3,42 | 3,42 | 34,2 | 34,2 |
| 5 | 5,125 | 0,92 | 7,96 | 4,35 | 4,35 | 5,87 | 3,69 | 29 | 29 |
| 6 | 5,125 | 7,96 | 0,92 | 4,35 | 4,35 | 3,69 | 5,87 | 29 | 29 |
Построение плана ускорений механизма. Определение ускорений шарнирных точек, центров тяжести звеньев и угловых ускорений звеньев.
2.3.1 Ускорение точки А кривошипа, совершающего равномерное вращательное движение, равно его нормальной составляющей
 .
.
2.3.2 Масштабный коэффициент ускорений
 ,
,
где  = 62,5 мм – отрезок на чертеже, изображающий ускорение точки А (принято).
= 62,5 мм – отрезок на чертеже, изображающий ускорение точки А (принято).
2.3.3 Ускорение точки В определяется по уравнению

-Н ВН ВН -Н
Нормальная составляющая относительного ускорения (для положения № 2) равна
 , а ее графическое значение
, а ее графическое значение
 .
.
Из построения плана ускорений находим касательную составляющую относительного ускорения
 ,
,  .
.
Полное относительное ускорение равно векторной сумме нормальной и касательной составляющих
 ;
;  ;
;
 .
.
Ускорение точки В находим из построения плана ускорений:
 ;
;  .
.
2.3.4 Ускорение точки В' определяется по уравнению

-Н ВН ВН -Н
Нормальная составляющая относительного ускорения (для положения № 2) равна
 , а ее графическое значение
, а ее графическое значение
 .
.
Из построения плана ускорений находим касательную составляющую относительного ускорения
 ,
,  .
.
Полное относительное ускорение равно векторной сумме нормальной и касательной составляющих
 ;
;  ;
;
 .
.
Ускорение точки В' находим из построения плана ускорений:
 ;
;  .
.
2.3.5 Определение ускорений центров тяжести звеньев:
 – для всех положений механизма;
– для всех положений механизма;
 ,
,  – для положения № 2;
– для положения № 2;
 ,
,  – для положения № 2.
– для положения № 2.
План ускорений для 2-го положения механизма показан на рис. 8, а для всех 6-ти положений – на чертеже курсовой работы.

Рис. 8. План ускорений механизма для положения № 2
2.3.6 Определение угловых ускорений звеньев. Угловые ускорения звеньев (1/c2) определяются по уравнению
 .
.
Соответственно для звеньев AB и AB' получаем (для 2-го положения механизма):
 ;
;
 .
.
Направления угловых ускорений звеньев определяются направлениями касательных составляющих относительных ускорений.
2.3.7 Определение ускорений точек В, В', М и L и угловых ускорений звеньев AB и AB' в особых ("мертвых") положениях механизма № 1 и № 4.
Из уравнений
 и
и 
вытекает, что линии действия ускорений точек А, В, и В', а также нормальных составляющих относительных ускорений  и
и  совпадают (направлены горизонтально), следовательно касательные составляющие относительных ускорений
совпадают (направлены горизонтально), следовательно касательные составляющие относительных ускорений  ,
,  , а полные относительные ускорения aBA и aB'A равны их нормальным составляющим:
, а полные относительные ускорения aBA и aB'A равны их нормальным составляющим:
 ,
,
 .
.
Ускорения точек М и L в этих положениях также направлены горизонтально, а концы векторов этих ускорений находятся на 1/3 длины aBA и aB'A от точки А.
Положение № 1:
 ;
;
 ;
;
 ;
;
 .
.
Положение № 4:
 ;
;
 ;
;
 ;
;
 .
.
Так как в положениях № 1 и № 4 и , то угловые ускорения звеньев AB и AB' равны нулю.
В табл. 2 приведены значения линейных ускорений точек и угловых ускорений звеньев для 6-ти положений механизма.
Таблица 2
Действительные значения ускорений
| № положения | aA | aB | aB' | atBA | aBA | atB'A | aB'A | aK | aL | aM | eAB | eAB' |
| м/с2 | 1/с2 | |||||||||||
| 1 | 187,5 | 362,95 | 12,05 | 0 | 175,45 | 0 | 175,45 | 93,75 | 129 | 246 | 0 | 0 |
| 2 | 187,5 | 87,39 | 100,11 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 144,6 | 141,81 | 671,16 | 671,16 |
| 3 | 187,5 | 100,11 | 87,39 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 141,81 | 144,6 | 671,16 | 671,16 |
| 4 | 187,5 | 12,05 | 362,95 | 0 | 175,45 | 0 | 175,45 | 93,75 | 246 | 129 | 0 | 0 |
| 5 | 187,5 | 100,11 | 87,39 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 141,81 | 144,6 | 671,16 | 671,16 |
| 6 | 187,5 | 87,39 | 100,11 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 144,6 | 141,81 | 671,16 | 671,16 |








